 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure-Dependent Regret and Constraint Violation Bounds for Online Convex Optimization with Time-Varying Constraints
Mar 15, 2026Online convex optimization (OCO) with time-varying constraints is a critical framework for sequential decision-making in dynamic networked systems, where learners must minimize cumulative loss while satisfying regions of feasibility that shift across rounds. Existing theoretical analyses typically treat constraint variation as a monolithic adversarial process, resulting in joint regret and violation bounds that are overly conservative for real-world network dynamics. In this paper, we introduce a structured characterization of constraint variation - smooth drift, periodic cycles, and sparse switching - mapping these classes to common network phenomena such as slow channel fading, diurnal traffic patterns, and discrete maintenance windows. We derive structure-dependent joint bounds that strictly improve upon adversarial rates when the constraint process exhibits regularity. To realize these gains, we propose the Structure-Adaptive Primal-Dual (SA-PD) algorithm, which utilizes observable constraint signals to detect environmental structure online and adapt dual update strategies accordingly. Extensive experiments on synthetic benchmarks and real-world datasets - including online electricity scheduling and transformer load management - demonstrate that SA-PD reduces cumulative constraint violation by up to 53% relative to structure-agnostic baselines while maintaining competitive utility. This work serves as a comprehensive guide for exploiting temporal regularity in constrained online learning for robust network engineering.
Solar PV Installation Potential Assessment on Building Facades Based on Vision and Language Foundation Models
Oct 01, 2025


Building facades represent a significant untapped resource for solar energy generation in dense urban environments, yet assessing their photovoltaic (PV) potential remains challenging due to complex geometries and semantic com ponents. This study introduces SF-SPA (Semantic Facade Solar-PV Assessment), an automated framework that transforms street-view photographs into quantitative PV deployment assessments. The approach combines com puter vision and artificial intelligence techniques to address three key challenges: perspective distortion correction, semantic understanding of facade elements, and spatial reasoning for PV layout optimization. Our four-stage pipeline processes images through geometric rectification, zero-shot semantic segmentation, Large Language Model (LLM) guided spatial reasoning, and energy simulation. Validation across 80 buildings in four countries demonstrates ro bust performance with mean area estimation errors of 6.2% ± 2.8% compared to expert annotations. The auto mated assessment requires approximately 100 seconds per building, a substantial gain in efficiency over manual methods. Simulated energy yield predictions confirm the method's reliability and applicability for regional poten tial studies, urban energy planning, and building-integrated photovoltaic (BIPV) deployment. Code is available at: https:github.com/CodeAXu/Solar-PV-Installation
Can Students Beyond The Teacher? Distilling Knowledge from Teacher's Bias
Dec 13, 2024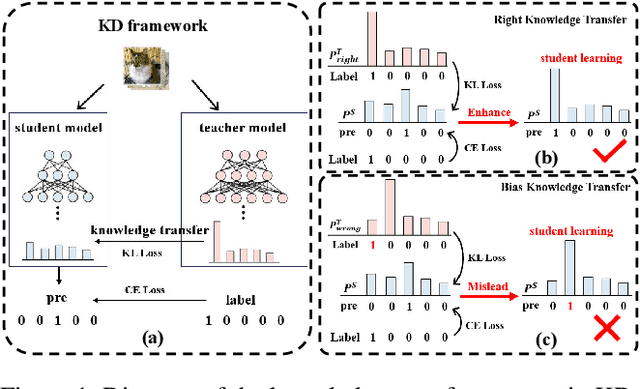
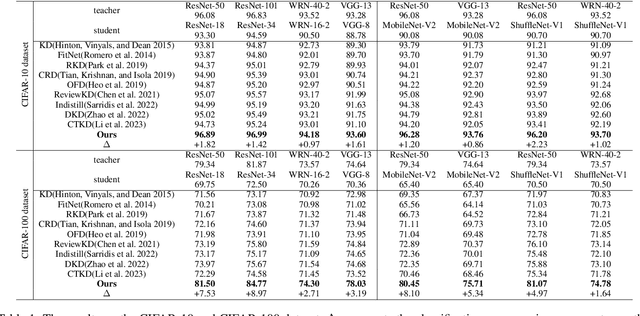
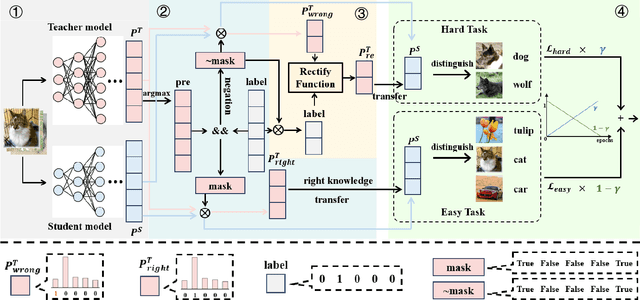
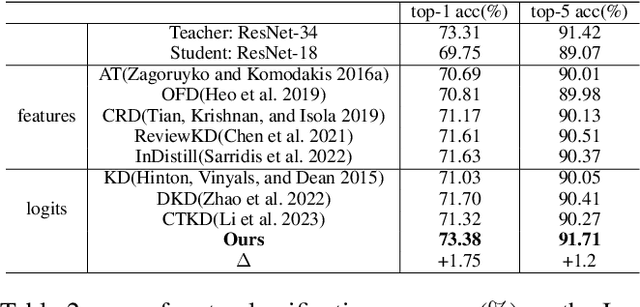
Knowledge distillation (KD) is a model compression technique that transfers knowledge from a large teacher model to a smaller student model to enhance its performance. Existing methods often assume that the student model is inherently inferior to the teacher model. However, we identify that the fundamental issue affecting student performance is the bias transferred by the teacher. Current KD frameworks transmit both right and wrong knowledge, introducing bias that misleads the student model. To address this issue, we propose a novel strategy to rectify bias and greatly improve the student model's performance. Our strategy involves three steps: First, we differentiate knowledge and design a bias elimination method to filter out biases, retaining only the right knowledge for the student model to learn. Next, we propose a bias rectification method to rectify the teacher model's wrong predictions, fundamentally addressing bias interference. The student model learns from both the right knowledge and the rectified biases, greatly improving its prediction accuracy. Additionally, we introduce a dynamic learning approach with a loss function that updates weights dynamically, allowing the student model to quickly learn right knowledge-based easy tasks initially and tackle hard tasks corresponding to biases later, greatly enhancing the student model's learning efficiency. To the best of our knowledge, this is the first strategy enabling the student model to surpass the teacher model. Experiments demonstrate that our strategy, as a plug-and-play module, is versatile across various mainstream KD frameworks. We will release our code after the paper is accepted.
360ORB-SLAM: A Visual SLAM System for Panoramic Images with Depth Completion Network
Jan 19, 2024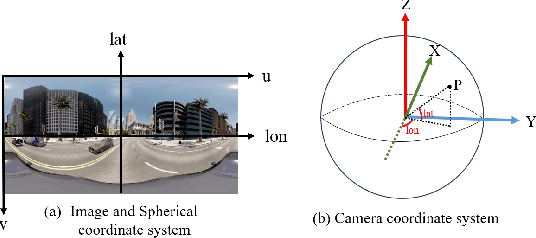
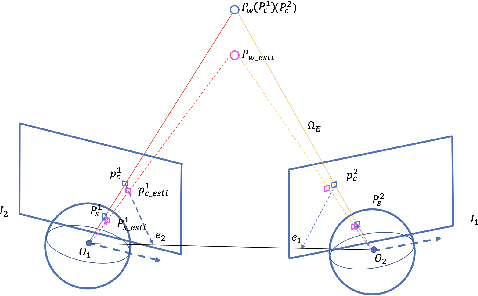
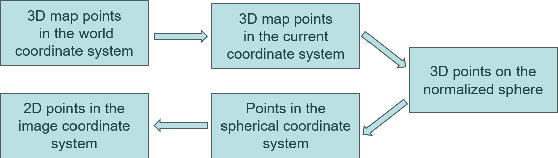
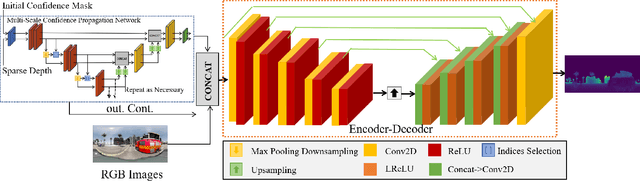
To enhance the performance and effect of AR/VR applications and visual assistance and inspection systems, visual simultaneous localization and mapping (vSLAM) is a fundamental task in computer vision and robotics. However, traditional vSLAM systems are limited by the camera's narrow field-of-view, resulting in challenges such as sparse feature distribution and lack of dense depth information. To overcome these limitations, this paper proposes a 360ORB-SLAM system for panoramic images that combines with a depth completion network. The system extracts feature points from the panoramic image, utilizes a panoramic triangulation module to generate sparse depth information, and employs a depth completion network to obtain a dense panoramic depth map. Experimental results on our novel panoramic dataset constructed based on Carla demonstrate that the proposed method achieves superior scale accuracy compared to existing monocular SLAM methods and effectively addresses the challenges of feature association and scale ambiguity. The integration of the depth completion network enhances system stability and mitigates the impact of dynamic elements on SLAM performance.
An inexact linearized proximal algorithm for a class of DC composite optimization problems and applications
Mar 29, 2023This paper is concerned with a class of DC composite optimization problems which, as an extension of the convex composite optimization problem and the DC program with nonsmooth components, often arises from robust factorization models of low-rank matrix recovery. For this class of nonconvex and nonsmooth problems, we propose an inexact linearized proximal algorithm (iLPA) which in each step computes an inexact minimizer of a strongly convex majorization constructed by the partial linearization of their objective functions. The generated iterate sequence is shown to be convergent under the Kurdyka-{\L}ojasiewicz (KL) property of a potential function, and the convergence admits a local R-linear rate if the potential function has the KL property of exponent $1/2$ at the limit point. For the latter assumption, we provide a verifiable condition by leveraging the composite structure, and clarify its relation with the regularity used for the convex composite optimization. Finally, the proposed iLPA is applied to a robust factorization model for matrix completions with outliers, DC programs with nonsmooth components, and $\ell_1$-norm exact penalty of DC constrained programs, and numerical comparison with the existing algorithms confirms the superiority of our iLPA in computing time and quality of solutions.
Semantic Visual Simultaneous Localization and Mapping: A Survey
Sep 14, 2022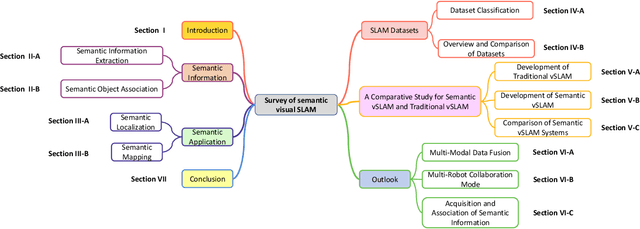
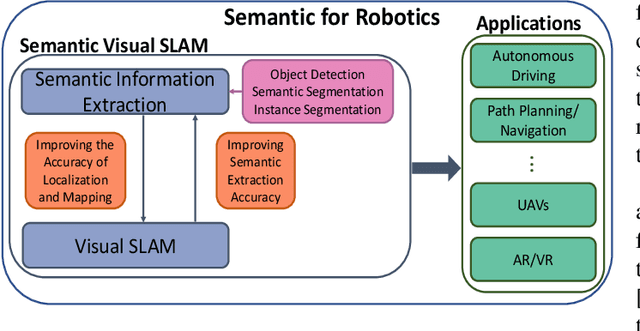
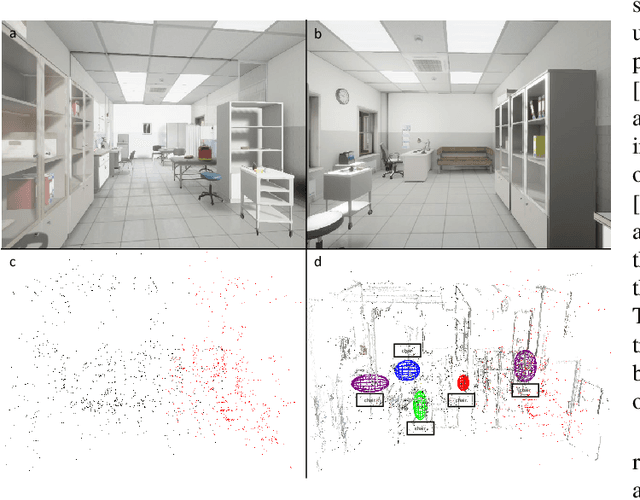
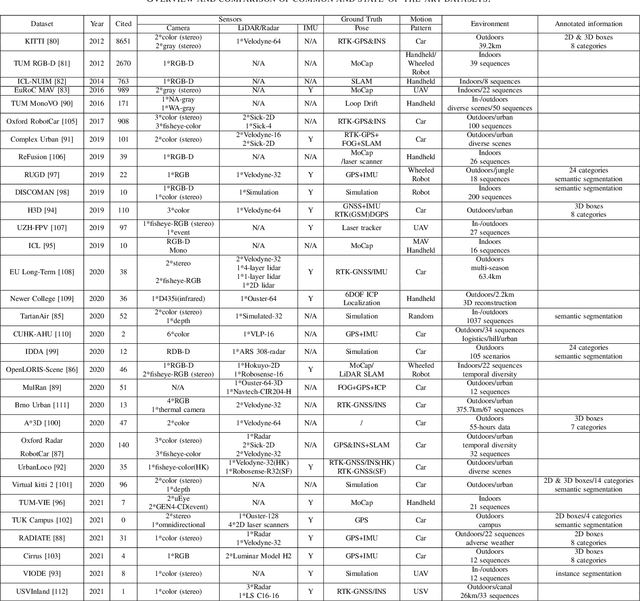
Visual Simultaneous Localization and Mapping (vSLAM) has achieved great progress in the computer vision and robotics communities, and has been successfully used in many fields such as autonomous robot navigation and AR/VR. However, vSLAM cannot achieve good localization in dynamic and complex environments. Numerous publications have reported that, by combining with the semantic information with vSLAM, the semantic vSLAM systems have the capability of solving the above problems in recent years. Nevertheless, there is no comprehensive survey about semantic vSLAM. To fill the gap, this paper first reviews the development of semantic vSLAM, explicitly focusing on its strengths and differences. Secondly, we explore three main issues of semantic vSLAM: the extraction and association of semantic information, the application of semantic information, and the advantages of semantic vSLAM. Then, we collect and analyze the current state-of-the-art SLAM datasets which have been widely used in semantic vSLAM systems. Finally, we discuss future directions that will provide a blueprint for the future development of semantic vSLAM.
Collaborative Visual Inertial SLAM for Multiple Smart Phones
Jun 23, 2021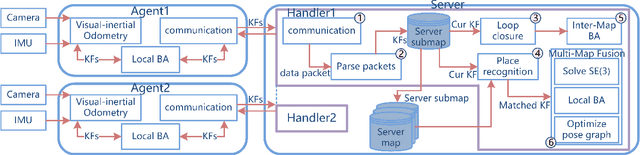
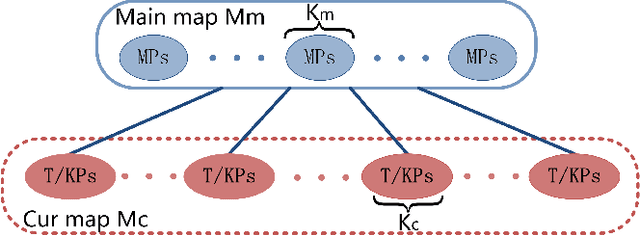
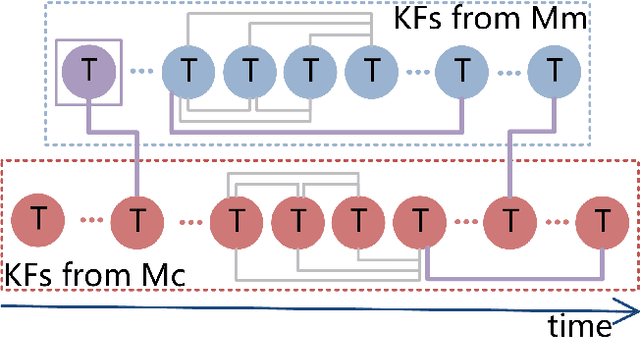
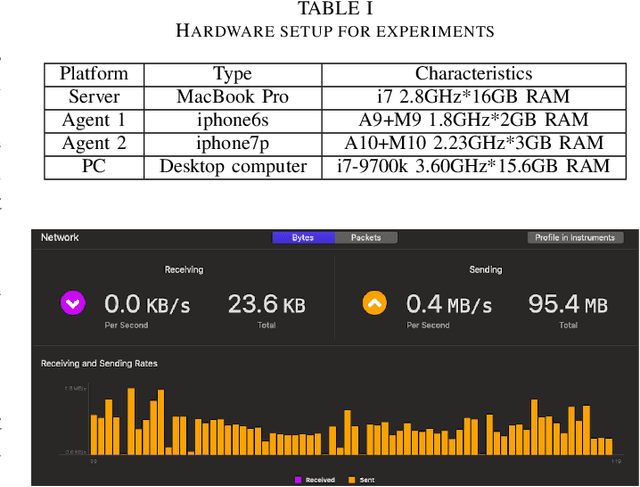
The efficiency and accuracy of mapping are crucial in a large scene and long-term AR applications. Multi-agent cooperative SLAM is the precondition of multi-user AR interaction. The cooperation of multiple smart phones has the potential to improve efficiency and robustness of task completion and can complete tasks that a single agent cannot do. However, it depends on robust communication, efficient location detection, robust mapping, and efficient information sharing among agents. We propose a multi-intelligence collaborative monocular visual-inertial SLAM deployed on multiple ios mobile devices with a centralized architecture. Each agent can independently explore the environment, run a visual-inertial odometry module online, and then send all the measurement information to a central server with higher computing resources. The server manages all the information received, detects overlapping areas, merges and optimizes the map, and shares information with the agents when needed. We have verified the performance of the system in public datasets and real environments. The accuracy of mapping and fusion of the proposed system is comparable to VINS-Mono which requires higher computing resources.