 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalog Beamforming Aided by Full-Dimension One-Bit Chains
Sep 10, 2024



This paper investigates the design of analog beamforming at the receiver in millimeter-wave (mmWave) multiple-input multiple-output (MIMO) systems, aided by full digital chains featuring 1-bit ADCs. We advocate utilizing these full digital chains to facilitate rapid channel estimation and beam acquisition for subsequent communication, even without prior knowledge of the training pilots. To balance energy consumption and implementation costs, we opt for 1-bit ADCs. We propose a two-stage maximum likelihood (ML)-based algorithm to estimate angles of arrival (AoAs) and facilitate the design of analog beamforming to maximize the received signal-to-noise ratio (SNR). We validate our proposed beamforming schemes in narrowband coherent channels through synthetic testing and in wideband coherent channels, particularly under the 3GPP clustered-delay-line (CDL)-C channel model.
Semantic Visual Simultaneous Localization and Mapping: A Survey
Sep 14, 2022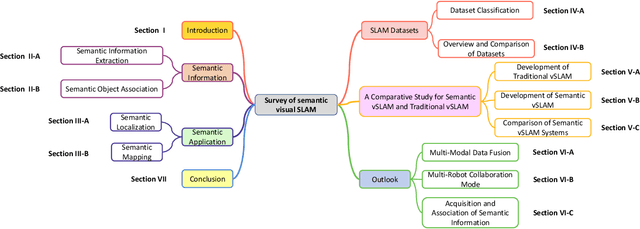
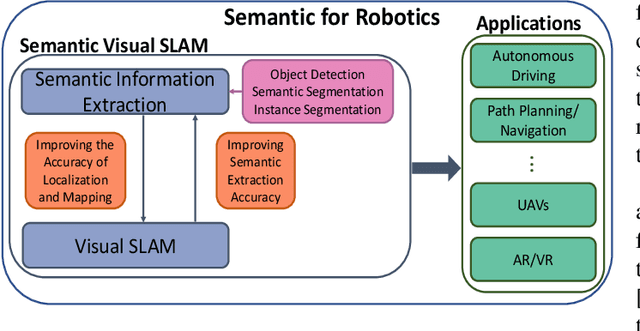
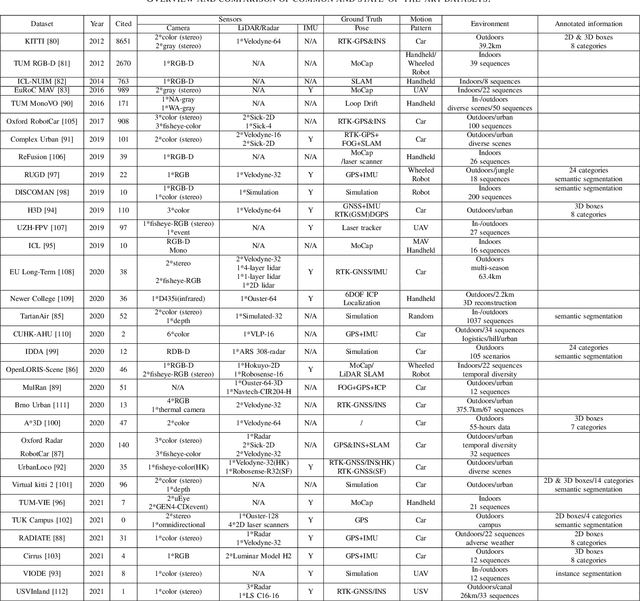
Visual Simultaneous Localization and Mapping (vSLAM) has achieved great progress in the computer vision and robotics communities, and has been successfully used in many fields such as autonomous robot navigation and AR/VR. However, vSLAM cannot achieve good localization in dynamic and complex environments. Numerous publications have reported that, by combining with the semantic information with vSLAM, the semantic vSLAM systems have the capability of solving the above problems in recent years. Nevertheless, there is no comprehensive survey about semantic vSLAM. To fill the gap, this paper first reviews the development of semantic vSLAM, explicitly focusing on its strengths and differences. Secondly, we explore three main issues of semantic vSLAM: the extraction and association of semantic information, the application of semantic information, and the advantages of semantic vSLAM. Then, we collect and analyze the current state-of-the-art SLAM datasets which have been widely used in semantic vSLAM systems. Finally, we discuss future directions that will provide a blueprint for the future development of semantic vSLAM.
Collaborative Visual Inertial SLAM for Multiple Smart Phones
Jun 23, 2021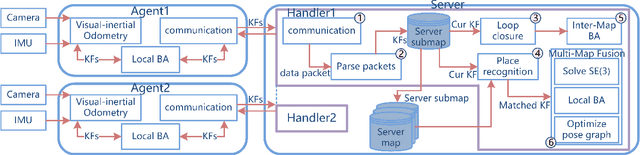
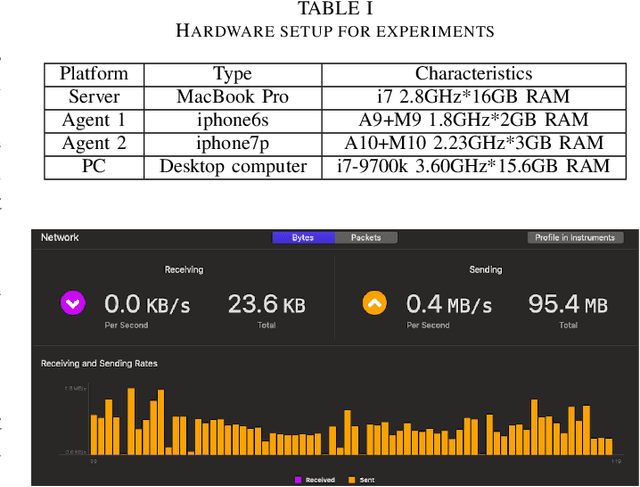
The efficiency and accuracy of mapping are crucial in a large scene and long-term AR applications. Multi-agent cooperative SLAM is the precondition of multi-user AR interaction. The cooperation of multiple smart phones has the potential to improve efficiency and robustness of task completion and can complete tasks that a single agent cannot do. However, it depends on robust communication, efficient location detection, robust mapping, and efficient information sharing among agents. We propose a multi-intelligence collaborative monocular visual-inertial SLAM deployed on multiple ios mobile devices with a centralized architecture. Each agent can independently explore the environment, run a visual-inertial odometry module online, and then send all the measurement information to a central server with higher computing resources. The server manages all the information received, detects overlapping areas, merges and optimizes the map, and shares information with the agents when needed. We have verified the performance of the system in public datasets and real environments. The accuracy of mapping and fusion of the proposed system is comparable to VINS-Mono which requires higher computing resources.
Accurate Object Association and Pose Updating for Semantic SLAM
Dec 21, 2020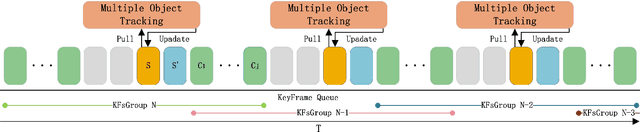
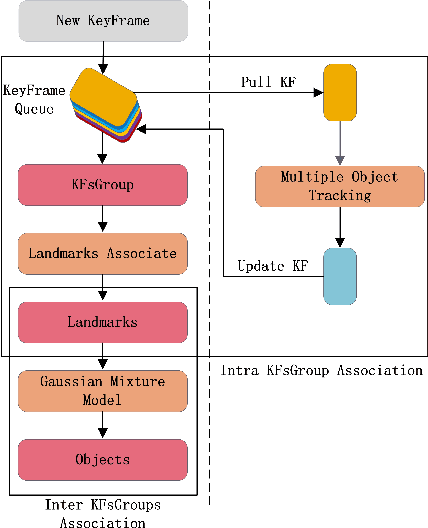
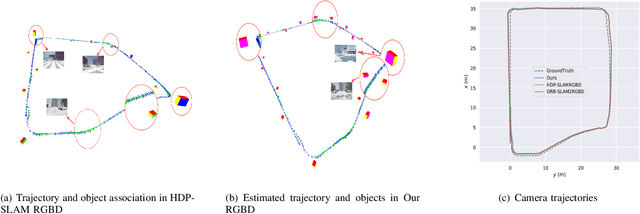
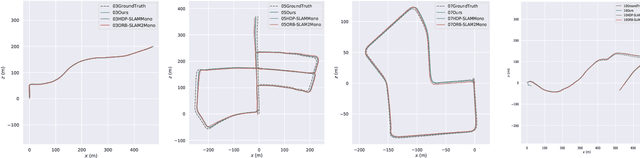
Nowadays in the field of semantic SLAM, how to correctly use semantic information for data association is still a problem worthy of study. The key to solving this problem is to correctly associate multiple object measurements of one object landmark, and refine the pose of object landmark. However, different objects locating closely are prone to be associated as one object landmark, and it is difficult to pick up a best pose from multiple object measurements associated with one object landmark. To tackle these problems, we propose a hierarchical object association strategy by means of multiple object tracking, through which closing objects will be correctly associated to different object landmarks, and an approach to refine the pose of object landmark from multiple object measurements. The proposed method is evaluated on a simulated sequence and several sequences in the Kitti dataset. Experimental results show a very impressive improvement with respect to the traditional SLAM and the state-of-the-art semantic SLAM method.