 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Augmentations for Time Series (RATS): A High-Performance Library for Time Series Augmentation
Jan 06, 2026Time series augmentation is critical for training robust deep learning models, particularly in domains where labelled data is scarce and expensive to obtain. However, existing augmentation libraries for time series, mainly written in Python, suffer from performance bottlenecks, where running time grows exponentially as dataset sizes increase -- an aspect limiting their applicability in large-scale, production-grade systems. We introduce RATS (Rapid Augmentations for Time Series), a high-performance library for time series augmentation written in Rust with Python bindings (RATSpy). RATS implements multiple augmentation methods spanning basic transformations, frequency-domain operations and time warping techniques, all accessible through a unified pipeline interface with built-in parallelisation. Comprehensive benchmarking of RATSpy versus a commonly used library (tasug) on 143 datasets demonstrates that RATSpy achieves an average speedup of 74.5\% over tsaug (up to 94.8\% on large datasets), with up to 47.9\% less peak memory usage.
TinyverseGP: Towards a Modular Cross-domain Benchmarking Framework for Genetic Programming
Apr 14, 2025Over the years, genetic programming (GP) has evolved, with many proposed variations, especially in how they represent a solution. Being essentially a program synthesis algorithm, it is capable of tackling multiple problem domains. Current benchmarking initiatives are fragmented, as the different representations are not compared with each other and their performance is not measured across the different domains. In this work, we propose a unified framework, dubbed TinyverseGP (inspired by tinyGP), which provides support to multiple representations and problem domains, including symbolic regression, logic synthesis and policy search.
* Accepted for presentation as a poster at the Genetic and Evolutionary Computation Conference (GECCO) and will appear in the GECCO'25 companion. GECCO'25 will be held July 14-18, 2025 in M\'alaga, Spain
CGP++ : A Modern C++ Implementation of Cartesian Genetic Programming
Jun 13, 2024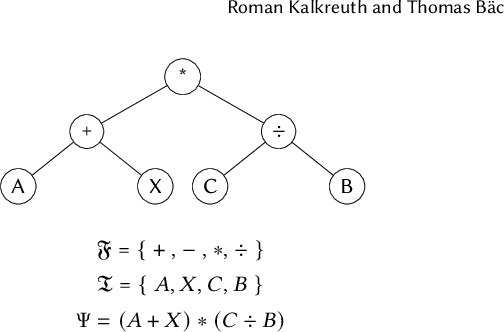
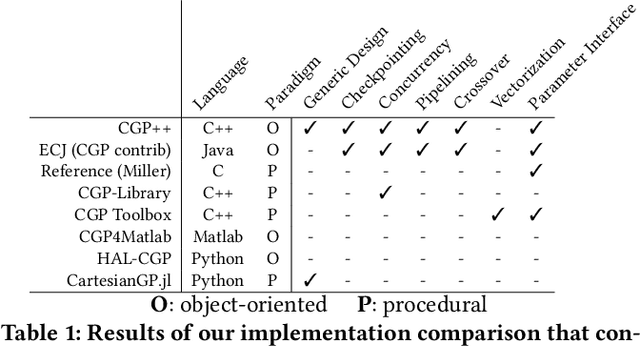
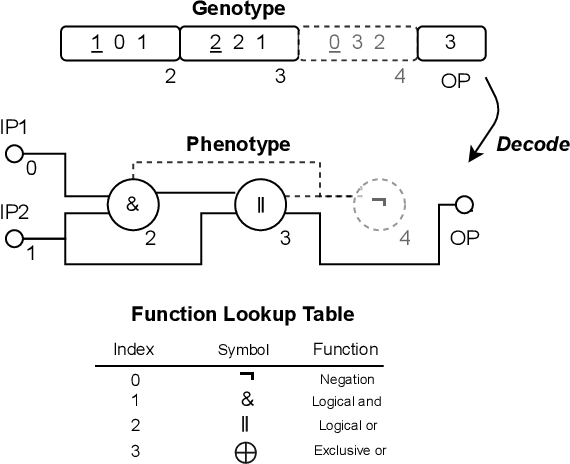
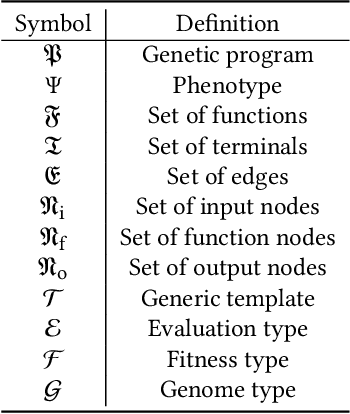
The reference implementation of Cartesian Genetic Programming (CGP) was written in the C programming language. C inherently follows a procedural programming paradigm, which entails challenges in providing a reusable and scalable implementation model for complex structures and methods. Moreover, due to the limiting factors of C, the reference implementation of CGP does not provide a generic framework and is therefore restricted to a set of predefined evaluation types. Besides the reference implementation, we also observe that other existing implementations are limited with respect to the features provided. In this work, we therefore propose the first version of a modern C++ implementation of CGP that pursues object-oriented design and generic programming paradigm to provide an efficient implementation model that can facilitate the discovery of new problem domains and the implementation of complex advanced methods that have been proposed for CGP over time. With the proposal of our new implementation, we aim to generally promote interpretability, accessibility and reproducibility in the field of CGP.
A Functional Analysis Approach to Symbolic Regression
Feb 09, 2024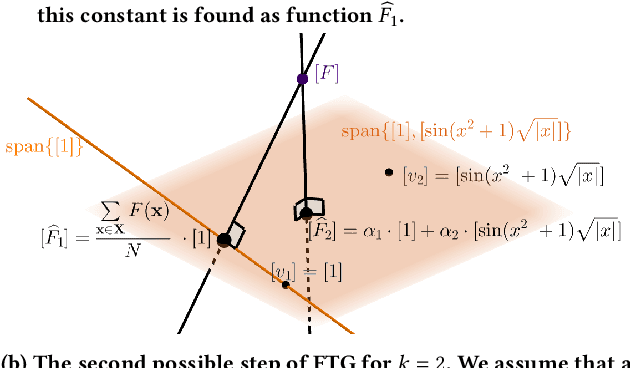
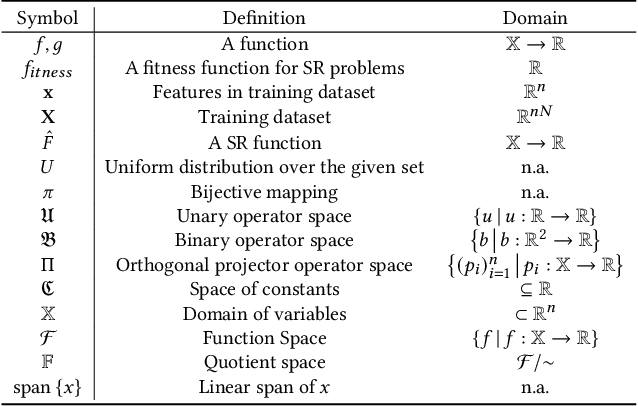
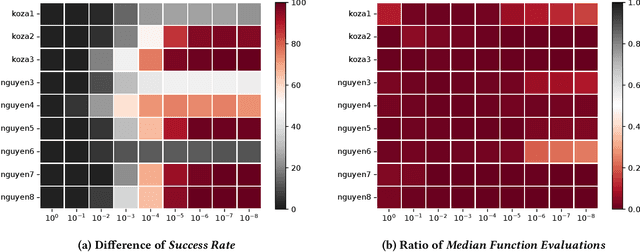
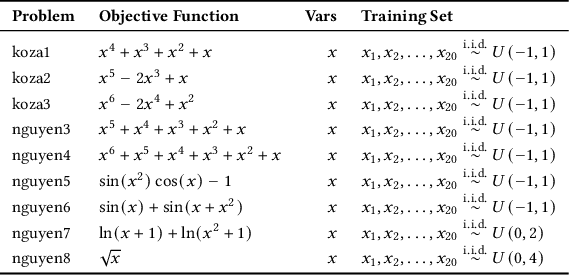
Symbolic regression (SR) poses a significant challenge for randomized search heuristics due to its reliance on the synthesis of expressions for input-output mappings. Although traditional genetic programming (GP) algorithms have achieved success in various domains, they exhibit limited performance when tree-based representations are used for SR. To address these limitations, we introduce a novel SR approach called Fourier Tree Growing (FTG) that draws insights from functional analysis. This new perspective enables us to perform optimization directly in a different space, thus avoiding intricate symbolic expressions. Our proposed algorithm exhibits significant performance improvements over traditional GP methods on a range of classical one-dimensional benchmarking problems. To identify and explain limiting factors of GP and FTG, we perform experiments on a large-scale polynomials benchmark with high-order polynomials up to degree 100. To the best of the authors' knowledge, this work represents the pioneering application of functional analysis in addressing SR problems. The superior performance of the proposed algorithm and insights into the limitations of GP open the way for further advancing GP for SR and related areas of explainable machine learning.
Challenges of ELA-guided Function Evolution using Genetic Programming
May 24, 2023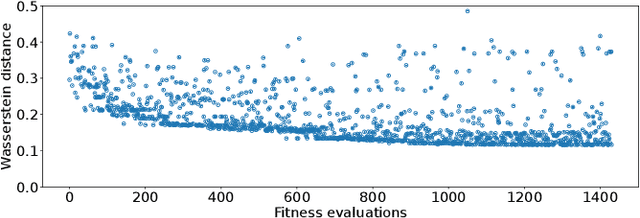
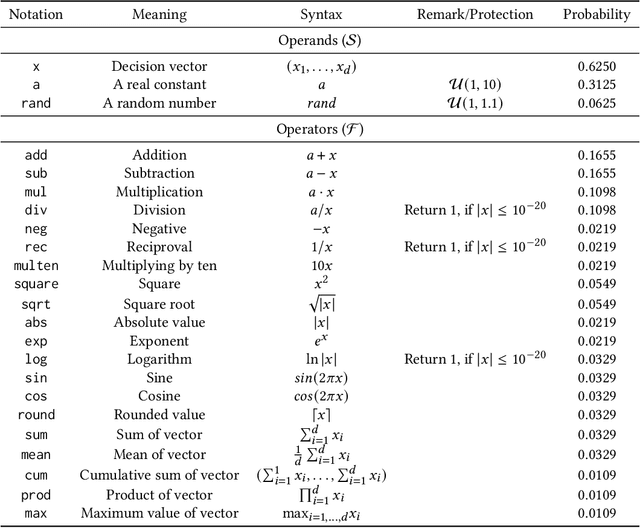
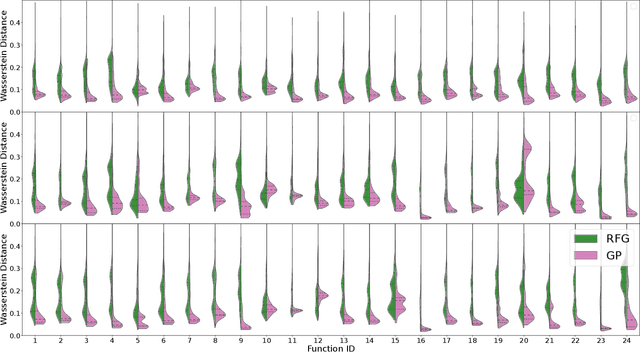
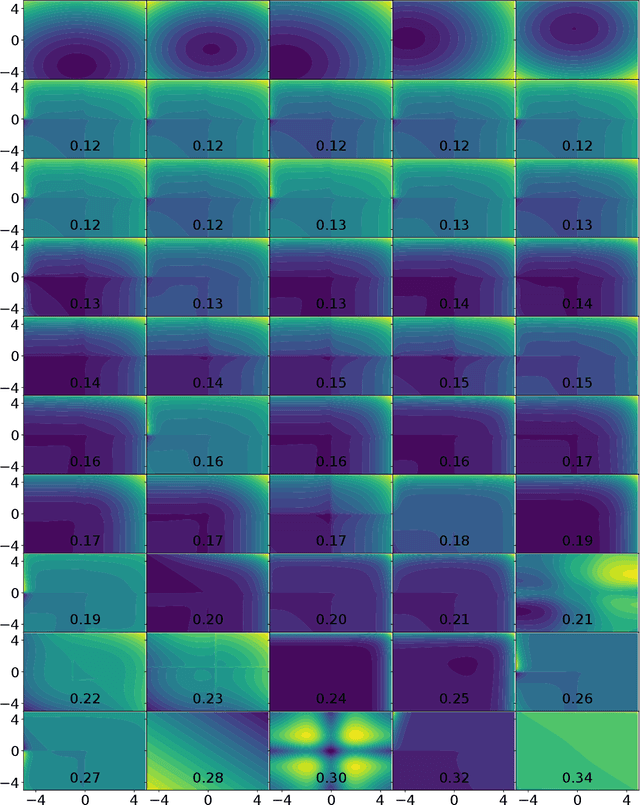
Within the optimization community, the question of how to generate new optimization problems has been gaining traction in recent years. Within topics such as instance space analysis (ISA), the generation of new problems can provide new benchmarks which are not yet explored in existing research. Beyond that, this function generation can also be exploited for solving complex real-world optimization problems. By generating functions with similar properties to the target problem, we can create a robust test set for algorithm selection and configuration. However, the generation of functions with specific target properties remains challenging. While features exist to capture low-level landscape properties, they might not always capture the intended high-level features. We show that a genetic programming (GP) approach guided by these exploratory landscape analysis (ELA) properties is not always able to find satisfying functions. Our results suggest that careful considerations of the weighting of landscape properties, as well as the distance measure used, might be required to evolve functions that are sufficiently representative to the target landscape.
On the Verge of Solving Rocket League using Deep Reinforcement Learning and Sim-to-sim Transfer
May 24, 2022
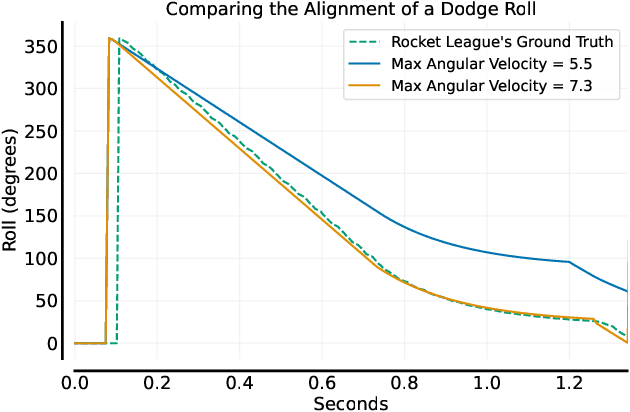
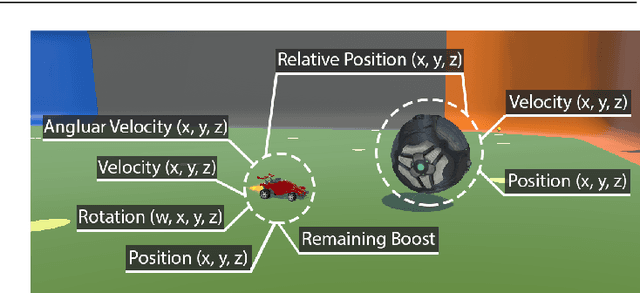
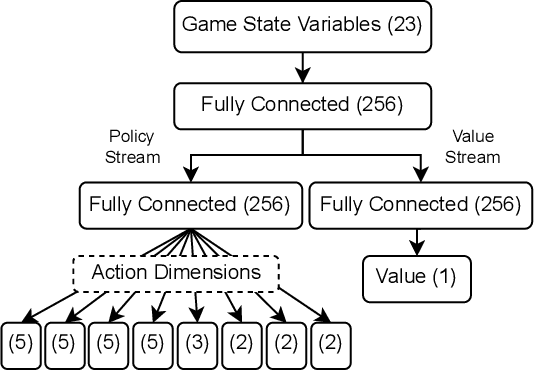
Autonomously trained agents that are supposed to play video games reasonably well rely either on fast simulation speeds or heavy parallelization across thousands of machines running concurrently. This work explores a third way that is established in robotics, namely sim-to-real transfer, or if the game is considered a simulation itself, sim-to-sim transfer. In the case of Rocket League, we demonstrate that single behaviors of goalies and strikers can be successfully learned using Deep Reinforcement Learning in the simulation environment and transferred back to the original game. Although the implemented training simulation is to some extent inaccurate, the goalkeeping agent saves nearly 100% of its faced shots once transferred, while the striking agent scores in about 75% of cases. Therefore, the trained agent is robust enough and able to generalize to the target domain of Rocket League.
Towards Advanced Phenotypic Mutations in Cartesian Genetic Programming
Mar 16, 2018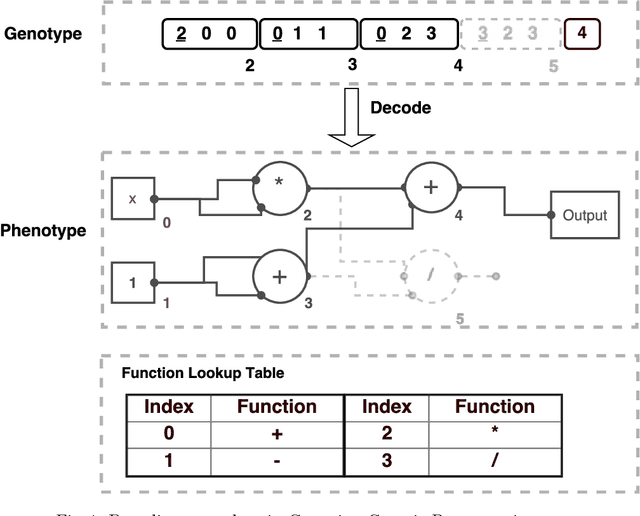

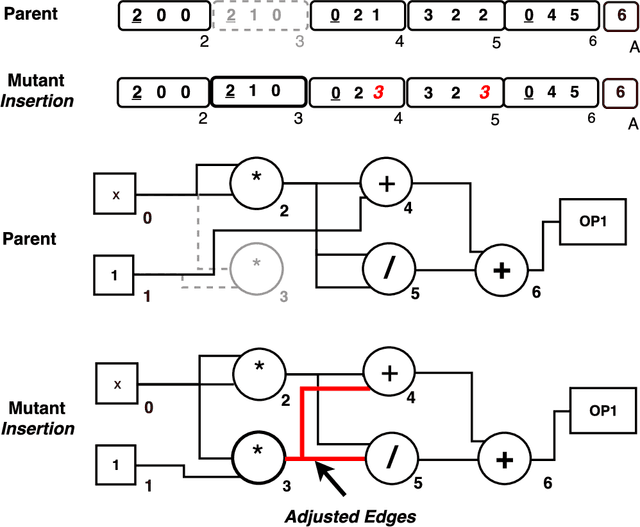
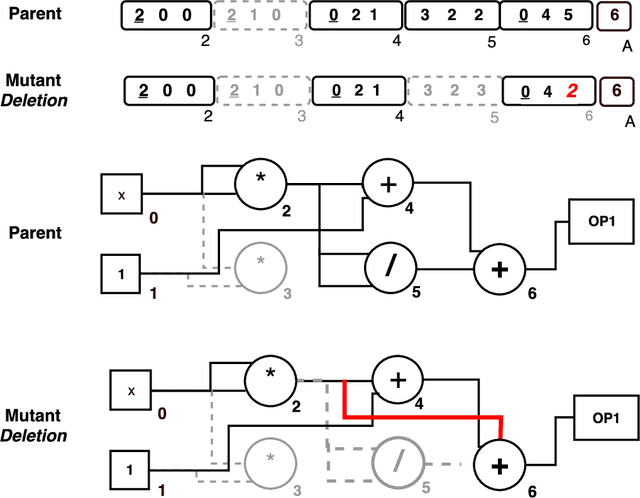
Cartesian Genetic Programming is often used with a point mutation as the sole genetic operator. In this paper, we propose two phenotypic mutation techniques and take a step towards advanced phenotypic mutations in Cartesian Genetic Programming. The functionality of the proposed mutations is inspired by biological evolution which mutates DNA sequences by inserting and deleting nucleotides. Experiments with symbolic regression and boolean functions problems show a better search performance when the proposed mutations are in use. The results of our experiments indicate that the use of phenotypic mutations could be beneficial for the use of Cartesian Genetic Programming.