 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Minimizers of $\ell^p$-Regularized Objectives Yield the Sparsest ReLU Neural Networks
May 27, 2025Overparameterized neural networks can interpolate a given dataset in many different ways, prompting the fundamental question: which among these solutions should we prefer, and what explicit regularization strategies will provably yield these solutions? This paper addresses the challenge of finding the sparsest interpolating ReLU network -- i.e., the network with the fewest nonzero parameters or neurons -- a goal with wide-ranging implications for efficiency, generalization, interpretability, theory, and model compression. Unlike post hoc pruning approaches, we propose a continuous, almost-everywhere differentiable training objective whose global minima are guaranteed to correspond to the sparsest single-hidden-layer ReLU networks that fit the data. This result marks a conceptual advance: it recasts the combinatorial problem of sparse interpolation as a smooth optimization task, potentially enabling the use of gradient-based training methods. Our objective is based on minimizing $\ell^p$ quasinorms of the weights for $0 < p < 1$, a classical sparsity-promoting strategy in finite-dimensional settings. However, applying these ideas to neural networks presents new challenges: the function class is infinite-dimensional, and the weights are learned using a highly nonconvex objective. We prove that, under our formulation, global minimizers correspond exactly to sparsest solutions. Our work lays a foundation for understanding when and how continuous sparsity-inducing objectives can be leveraged to recover sparse networks through training.
Optimal Recovery Meets Minimax Estimation
Feb 24, 2025A fundamental problem in statistics and machine learning is to estimate a function $f$ from possibly noisy observations of its point samples. The goal is to design a numerical algorithm to construct an approximation $\hat f$ to $f$ in a prescribed norm that asymptotically achieves the best possible error (as a function of the number $m$ of observations and the variance $\sigma^2$ of the noise). This problem has received considerable attention in both nonparametric statistics (noisy observations) and optimal recovery (noiseless observations). Quantitative bounds require assumptions on $f$, known as model class assumptions. Classical results assume that $f$ is in the unit ball of a Besov space. In nonparametric statistics, the best possible performance of an algorithm for finding $\hat f$ is known as the minimax rate and has been studied in this setting under the assumption that the noise is Gaussian. In optimal recovery, the best possible performance of an algorithm is known as the optimal recovery rate and has also been determined in this setting. While one would expect that the minimax rate recovers the optimal recovery rate when the noise level $\sigma$ tends to zero, it turns out that the current results on minimax rates do not carefully determine the dependence on $\sigma$ and the limit cannot be taken. This paper handles this issue and determines the noise-level-aware (NLA) minimax rates for Besov classes when error is measured in an $L_q$-norm with matching upper and lower bounds. The end result is a reconciliation between minimax rates and optimal recovery rates. The NLA minimax rate continuously depends on the noise level and recovers the optimal recovery rate when $\sigma$ tends to zero.
The Effects of Multi-Task Learning on ReLU Neural Network Functions
Oct 29, 2024This paper studies the properties of solutions to multi-task shallow ReLU neural network learning problems, wherein the network is trained to fit a dataset with minimal sum of squared weights. Remarkably, the solutions learned for each individual task resemble those obtained by solving a kernel method, revealing a novel connection between neural networks and kernel methods. It is known that single-task neural network training problems are equivalent to minimum norm interpolation problem in a non-Hilbertian Banach space, and that the solutions of such problems are generally non-unique. In contrast, we prove that the solutions to univariate-input, multi-task neural network interpolation problems are almost always unique, and coincide with the solution to a minimum-norm interpolation problem in a Sobolev (Reproducing Kernel) Hilbert Space. We also demonstrate a similar phenomenon in the multivariate-input case; specifically, we show that neural network learning problems with large numbers of diverse tasks are approximately equivalent to an $\ell^2$ (Hilbert space) minimization problem over a fixed kernel determined by the optimal neurons.
ReLUs Are Sufficient for Learning Implicit Neural Representations
Jun 04, 2024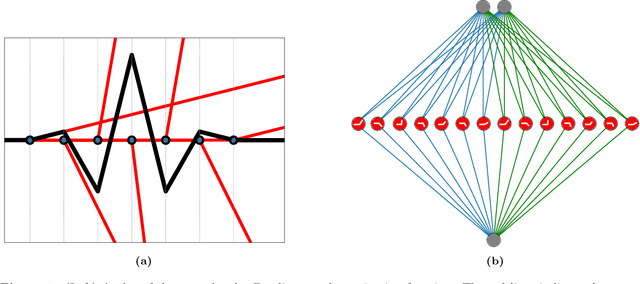
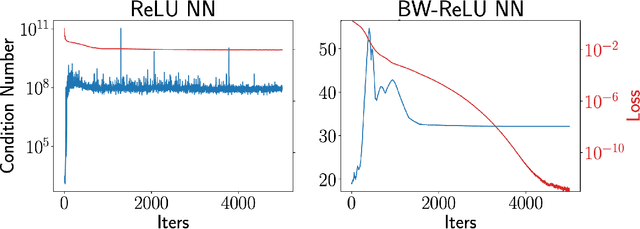
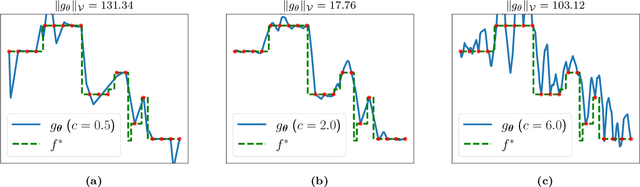
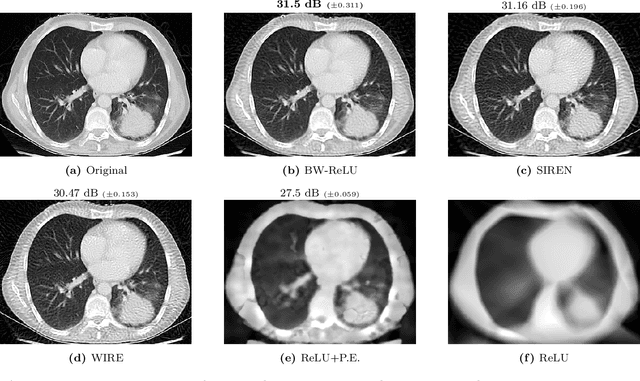
Motivated by the growing theoretical understanding of neural networks that employ the Rectified Linear Unit (ReLU) as their activation function, we revisit the use of ReLU activation functions for learning implicit neural representations (INRs). Inspired by second order B-spline wavelets, we incorporate a set of simple constraints to the ReLU neurons in each layer of a deep neural network (DNN) to remedy the spectral bias. This in turn enables its use for various INR tasks. Empirically, we demonstrate that, contrary to popular belief, one can learn state-of-the-art INRs based on a DNN composed of only ReLU neurons. Next, by leveraging recent theoretical works which characterize the kinds of functions ReLU neural networks learn, we provide a way to quantify the regularity of the learned function. This offers a principled approach to selecting the hyperparameters in INR architectures. We substantiate our claims through experiments in signal representation, super resolution, and computed tomography, demonstrating the versatility and effectiveness of our method. The code for all experiments can be found at https://github.com/joeshenouda/relu-inrs.
An Experimental Design Framework for Label-Efficient Supervised Finetuning of Large Language Models
Jan 12, 2024



Supervised finetuning (SFT) on instruction datasets has played a crucial role in achieving the remarkable zero-shot generalization capabilities observed in modern large language models (LLMs). However, the annotation efforts required to produce high quality responses for instructions are becoming prohibitively expensive, especially as the number of tasks spanned by instruction datasets continues to increase. Active learning is effective in identifying useful subsets of samples to annotate from an unlabeled pool, but its high computational cost remains a barrier to its widespread applicability in the context of LLMs. To mitigate the annotation cost of SFT and circumvent the computational bottlenecks of active learning, we propose using experimental design. Experimental design techniques select the most informative samples to label, and typically maximize some notion of uncertainty and/or diversity. In our work, we implement a framework that evaluates several existing and novel experimental design techniques and find that these methods consistently yield significant gains in label efficiency with little computational overhead. On generative tasks, our methods achieve the same generalization performance with only $50\%$ of annotation cost required by random sampling.
Weighted variation spaces and approximation by shallow ReLU networks
Jul 28, 2023We investigate the approximation of functions $f$ on a bounded domain $\Omega\subset \mathbb{R}^d$ by the outputs of single-hidden-layer ReLU neural networks of width $n$. This form of nonlinear $n$-term dictionary approximation has been intensely studied since it is the simplest case of neural network approximation (NNA). There are several celebrated approximation results for this form of NNA that introduce novel model classes of functions on $\Omega$ whose approximation rates avoid the curse of dimensionality. These novel classes include Barron classes, and classes based on sparsity or variation such as the Radon-domain BV classes. The present paper is concerned with the definition of these novel model classes on domains $\Omega$. The current definition of these model classes does not depend on the domain $\Omega$. A new and more proper definition of model classes on domains is given by introducing the concept of weighted variation spaces. These new model classes are intrinsic to the domain itself. The importance of these new model classes is that they are strictly larger than the classical (domain-independent) classes. Yet, it is shown that they maintain the same NNA rates.
Vector-Valued Variation Spaces and Width Bounds for DNNs: Insights on Weight Decay Regularization
May 25, 2023Deep neural networks (DNNs) trained to minimize a loss term plus the sum of squared weights via gradient descent corresponds to the common approach of training with weight decay. This paper provides new insights into this common learning framework. We characterize the kinds of functions learned by training with weight decay for multi-output (vector-valued) ReLU neural networks. This extends previous characterizations that were limited to single-output (scalar-valued) networks. This characterization requires the definition of a new class of neural function spaces that we call vector-valued variation (VV) spaces. We prove that neural networks (NNs) are optimal solutions to learning problems posed over VV spaces via a novel representer theorem. This new representer theorem shows that solutions to these learning problems exist as vector-valued neural networks with widths bounded in terms of the number of training data. Next, via a novel connection to the multi-task lasso problem, we derive new and tighter bounds on the widths of homogeneous layers in DNNs. The bounds are determined by the effective dimensions of the training data embeddings in/out of the layers. This result sheds new light on the architectural requirements for DNNs. Finally, the connection to the multi-task lasso problem suggests a new approach to compressing pre-trained networks.
Filtered Iterative Denoising for Linear Inverse Problems
Feb 15, 2023Iterative denoising algorithms (IDAs) have been tremendously successful in a range of linear inverse problems arising in signal and image processing. The classic instance of this is the famous Iterative Soft-Thresholding Algorithm (ISTA), based on soft-thresholding of wavelet coefficients. More modern approaches to IDAs replace soft-thresholding with a black-box denoiser, such as BM3D or a learned deep neural network denoiser. These are often referred to as ``plug-and-play" (PnP) methods because, in principle, an off-the-shelf denoiser can be used for a variety of different inverse problems. The problem with PnP methods is that they may not provide the best solutions to a specific linear inverse problem; better solutions can often be obtained by a denoiser that is customized to the problem domain. A problem-specific denoiser, however, requires expensive re-engineering or re-learning which eliminates the simplicity and ease that makes PnP methods attractive in the first place. This paper proposes a new IDA that allows one to use a general, black-box denoiser more effectively via a simple linear filtering modification to the usual gradient update steps that accounts for the specific linear inverse problem. The proposed Filtered IDA (FIDA) is mathematically derived from the classical ISTA and wavelet denoising viewpoint. We show experimentally that FIDA can produce superior results compared to existing IDA methods with BM3D.
Deep Learning Meets Sparse Regularization: A Signal Processing Perspective
Jan 30, 2023
Deep learning has been wildly successful in practice and most state-of-the-art machine learning methods are based on neural networks. Lacking, however, is a rigorous mathematical theory that adequately explains the amazing performance of deep neural networks. In this article, we present a relatively new mathematical framework that provides the beginning of a deeper understanding of deep learning. This framework precisely characterizes the functional properties of neural networks that are trained to fit to data. The key mathematical tools which support this framework include transform-domain sparse regularization, the Radon transform of computed tomography, and approximation theory, which are all techniques deeply rooted in signal processing. This framework explains the effect of weight decay regularization in neural network training, the use of skip connections and low-rank weight matrices in network architectures, the role of sparsity in neural networks, and explains why neural networks can perform well in high-dimensional problems.
A Better Way to Decay: Proximal Gradient Training Algorithms for Neural Nets
Oct 06, 2022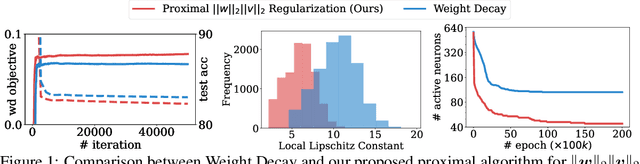
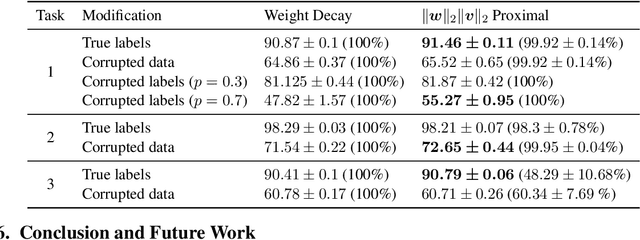

Weight decay is one of the most widely used forms of regularization in deep learning, and has been shown to improve generalization and robustness. The optimization objective driving weight decay is a sum of losses plus a term proportional to the sum of squared weights. This paper argues that stochastic gradient descent (SGD) may be an inefficient algorithm for this objective. For neural networks with ReLU activations, solutions to the weight decay objective are equivalent to those of a different objective in which the regularization term is instead a sum of products of $\ell_2$ (not squared) norms of the input and output weights associated each ReLU. This alternative (and effectively equivalent) regularization suggests a novel proximal gradient algorithm for network training. Theory and experiments support the new training approach, showing that it can converge much faster to the sparse solutions it shares with standard weight decay training.