 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIRRORTALK: Forging Personalized Avatars Via Disentangled Style and Hierarchical Motion Control
Jan 30, 2026Synthesizing personalized talking faces that uphold and highlight a speaker's unique style while maintaining lip-sync accuracy remains a significant challenge. A primary limitation of existing approaches is the intrinsic confounding of speaker-specific talking style and semantic content within facial motions, which prevents the faithful transfer of a speaker's unique persona to arbitrary speech. In this paper, we propose MirrorTalk, a generative framework based on a conditional diffusion model, combined with a Semantically-Disentangled Style Encoder (SDSE) that can distill pure style representations from a brief reference video. To effectively utilize this representation, we further introduce a hierarchical modulation strategy within the diffusion process. This mechanism guides the synthesis by dynamically balancing the contributions of audio and style features across distinct facial regions, ensuring both precise lip-sync accuracy and expressive full-face dynamics. Extensive experiments demonstrate that MirrorTalk achieves significant improvements over state-of-the-art methods in terms of lip-sync accuracy and personalization preservation.
Multi-Agent Intelligence for Multidisciplinary Decision-Making in Gastrointestinal Oncology
Dec 23, 2025Multimodal clinical reasoning in the field of gastrointestinal (GI) oncology necessitates the integrated interpretation of endoscopic imagery, radiological data, and biochemical markers. Despite the evident potential exhibited by Multimodal Large Language Models (MLLMs), they frequently encounter challenges such as context dilution and hallucination when confronted with intricate, heterogeneous medical histories. In order to address these limitations, a hierarchical Multi-Agent Framework is proposed, which emulates the collaborative workflow of a human Multidisciplinary Team (MDT). The system attained a composite expert evaluation score of 4.60/5.00, thereby demonstrating a substantial improvement over the monolithic baseline. It is noteworthy that the agent-based architecture yielded the most substantial enhancements in reasoning logic and medical accuracy. The findings indicate that mimetic, agent-based collaboration provides a scalable, interpretable, and clinically robust paradigm for automated decision support in oncology.
MedBench v4: A Robust and Scalable Benchmark for Evaluating Chinese Medical Language Models, Multimodal Models, and Intelligent Agents
Nov 19, 2025Recent advances in medical large language models (LLMs), multimodal models, and agents demand evaluation frameworks that reflect real clinical workflows and safety constraints. We present MedBench v4, a nationwide, cloud-based benchmarking infrastructure comprising over 700,000 expert-curated tasks spanning 24 primary and 91 secondary specialties, with dedicated tracks for LLMs, multimodal models, and agents. Items undergo multi-stage refinement and multi-round review by clinicians from more than 500 institutions, and open-ended responses are scored by an LLM-as-a-judge calibrated to human ratings. We evaluate 15 frontier models. Base LLMs reach a mean overall score of 54.1/100 (best: Claude Sonnet 4.5, 62.5/100), but safety and ethics remain low (18.4/100). Multimodal models perform worse overall (mean 47.5/100; best: GPT-5, 54.9/100), with solid perception yet weaker cross-modal reasoning. Agents built on the same backbones substantially improve end-to-end performance (mean 79.8/100), with Claude Sonnet 4.5-based agents achieving up to 85.3/100 overall and 88.9/100 on safety tasks. MedBench v4 thus reveals persisting gaps in multimodal reasoning and safety for base models, while showing that governance-aware agentic orchestration can markedly enhance benchmarked clinical readiness without sacrificing capability. By aligning tasks with Chinese clinical guidelines and regulatory priorities, the platform offers a practical reference for hospitals, developers, and policymakers auditing medical AI.
ConsistTalk: Intensity Controllable Temporally Consistent Talking Head Generation with Diffusion Noise Search
Nov 10, 2025Recent advancements in video diffusion models have significantly enhanced audio-driven portrait animation. However, current methods still suffer from flickering, identity drift, and poor audio-visual synchronization. These issues primarily stem from entangled appearance-motion representations and unstable inference strategies. In this paper, we introduce \textbf{ConsistTalk}, a novel intensity-controllable and temporally consistent talking head generation framework with diffusion noise search inference. First, we propose \textbf{an optical flow-guided temporal module (OFT)} that decouples motion features from static appearance by leveraging facial optical flow, thereby reducing visual flicker and improving temporal consistency. Second, we present an \textbf{Audio-to-Intensity (A2I) model} obtained through multimodal teacher-student knowledge distillation. By transforming audio and facial velocity features into a frame-wise intensity sequence, the A2I model enables joint modeling of audio and visual motion, resulting in more natural dynamics. This further enables fine-grained, frame-wise control of motion dynamics while maintaining tight audio-visual synchronization. Third, we introduce a \textbf{diffusion noise initialization strategy (IC-Init)}. By enforcing explicit constraints on background coherence and motion continuity during inference-time noise search, we achieve better identity preservation and refine motion dynamics compared to the current autoregressive strategy. Extensive experiments demonstrate that ConsistTalk significantly outperforms prior methods in reducing flicker, preserving identity, and delivering temporally stable, high-fidelity talking head videos.
Decoupled Distillation to Erase: A General Unlearning Method for Any Class-centric Tasks
Mar 31, 2025In this work, we present DEcoupLEd Distillation To Erase (DELETE), a general and strong unlearning method for any class-centric tasks. To derive this, we first propose a theoretical framework to analyze the general form of unlearning loss and decompose it into forgetting and retention terms. Through the theoretical framework, we point out that a class of previous methods could be mainly formulated as a loss that implicitly optimizes the forgetting term while lacking supervision for the retention term, disturbing the distribution of pre-trained model and struggling to adequately preserve knowledge of the remaining classes. To address it, we refine the retention term using "dark knowledge" and propose a mask distillation unlearning method. By applying a mask to separate forgetting logits from retention logits, our approach optimizes both the forgetting and refined retention components simultaneously, retaining knowledge of the remaining classes while ensuring thorough forgetting of the target class. Without access to the remaining data or intervention (i.e., used in some works), we achieve state-of-the-art performance across various benchmarks. What's more, DELETE is a general solution that can be applied to various downstream tasks, including face recognition, backdoor defense, and semantic segmentation with great performance.
PRET: Planning with Directed Fidelity Trajectory for Vision and Language Navigation
Jul 16, 2024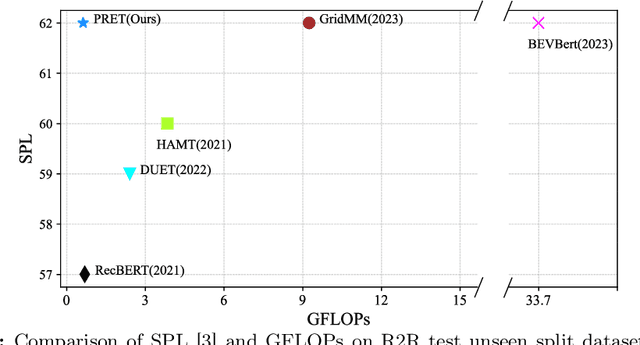
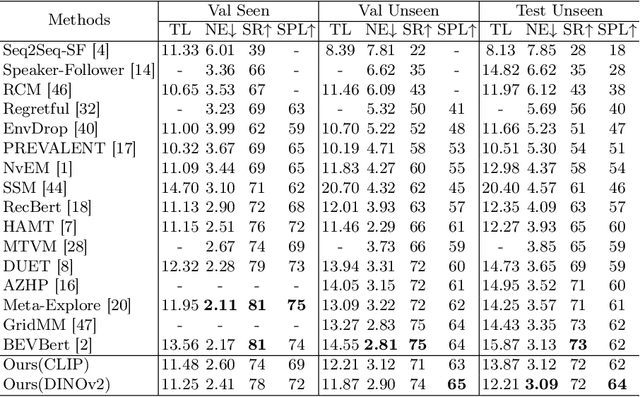

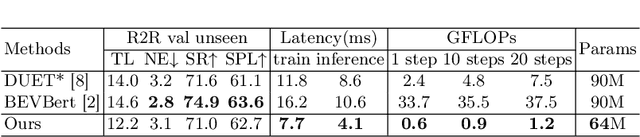
Vision and language navigation is a task that requires an agent to navigate according to a natural language instruction. Recent methods predict sub-goals on constructed topology map at each step to enable long-term action planning. However, they suffer from high computational cost when attempting to support such high-level predictions with GCN-like models. In this work, we propose an alternative method that facilitates navigation planning by considering the alignment between instructions and directed fidelity trajectories, which refers to a path from the initial node to the candidate locations on a directed graph without detours. This planning strategy leads to an efficient model while achieving strong performance. Specifically, we introduce a directed graph to illustrate the explored area of the environment, emphasizing directionality. Then, we firstly define the trajectory representation as a sequence of directed edge features, which are extracted from the panorama based on the corresponding orientation. Ultimately, we assess and compare the alignment between instruction and different trajectories during navigation to determine the next navigation target. Our method outperforms previous SOTA method BEVBert on RxR dataset and is comparable on R2R dataset while largely reducing the computational cost. Code is available: https://github.com/iSEE-Laboratory/VLN-PRET.
Solution for CVPR 2024 UG2+ Challenge Track on All Weather Semantic Segmentation
Jun 09, 2024
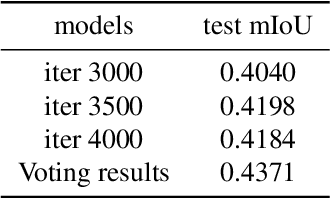
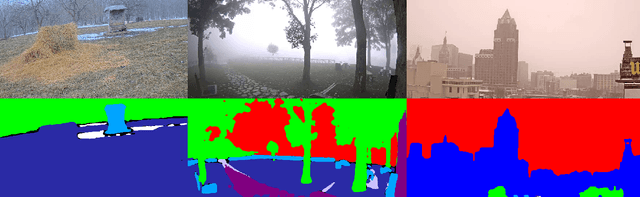
In this report, we present our solution for the semantic segmentation in adverse weather, in UG2+ Challenge at CVPR 2024. To achieve robust and accurate segmentation results across various weather conditions, we initialize the InternImage-H backbone with pre-trained weights from the large-scale joint dataset and enhance it with the state-of-the-art Upernet segmentation method. Specifically, we utilize offline and online data augmentation approaches to extend the train set, which helps us to further improve the performance of the segmenter. As a result, our proposed solution demonstrates advanced performance on the test set and achieves 3rd position in this challenge.
SAR2EO: A High-resolution Image Translation Framework with Denoising Enhancement
Apr 08, 2023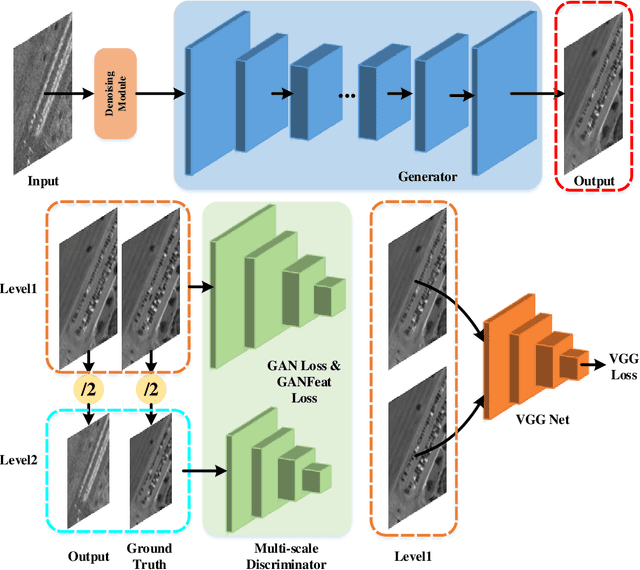
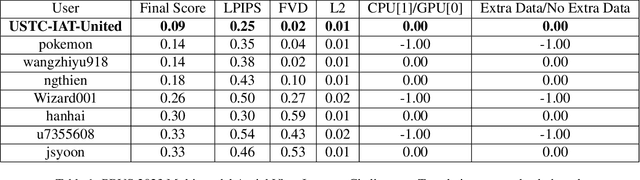

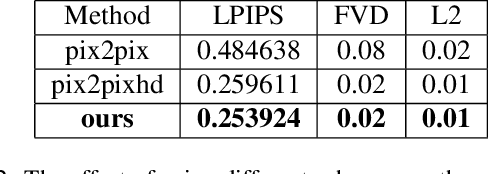
Synthetic Aperture Radar (SAR) to electro-optical (EO) image translation is a fundamental task in remote sensing that can enrich the dataset by fusing information from different sources. Recently, many methods have been proposed to tackle this task, but they are still difficult to complete the conversion from low-resolution images to high-resolution images. Thus, we propose a framework, SAR2EO, aiming at addressing this challenge. Firstly, to generate high-quality EO images, we adopt the coarse-to-fine generator, multi-scale discriminators, and improved adversarial loss in the pix2pixHD model to increase the synthesis quality. Secondly, we introduce a denoising module to remove the noise in SAR images, which helps to suppress the noise while preserving the structural information of the images. To validate the effectiveness of the proposed framework, we conduct experiments on the dataset of the Multi-modal Aerial View Imagery Challenge (MAVIC), which consists of large-scale SAR and EO image pairs. The experimental results demonstrate the superiority of our proposed framework, and we win the first place in the MAVIC held in CVPR PBVS 2023.