 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRET: Planning with Directed Fidelity Trajectory for Vision and Language Navigation
Paper and Code
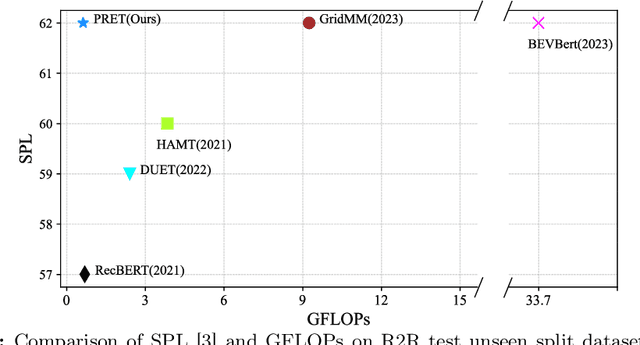
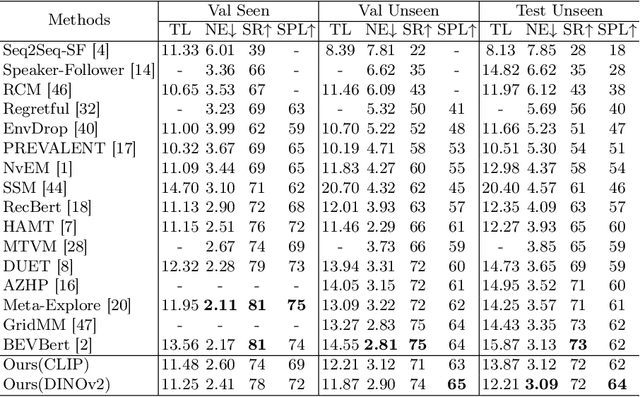

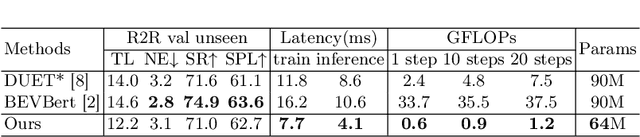
Vision and language navigation is a task that requires an agent to navigate according to a natural language instruction. Recent methods predict sub-goals on constructed topology map at each step to enable long-term action planning. However, they suffer from high computational cost when attempting to support such high-level predictions with GCN-like models. In this work, we propose an alternative method that facilitates navigation planning by considering the alignment between instructions and directed fidelity trajectories, which refers to a path from the initial node to the candidate locations on a directed graph without detours. This planning strategy leads to an efficient model while achieving strong performance. Specifically, we introduce a directed graph to illustrate the explored area of the environment, emphasizing directionality. Then, we firstly define the trajectory representation as a sequence of directed edge features, which are extracted from the panorama based on the corresponding orientation. Ultimately, we assess and compare the alignment between instruction and different trajectories during navigation to determine the next navigation target. Our method outperforms previous SOTA method BEVBert on RxR dataset and is comparable on R2R dataset while largely reducing the computational cost. Code is available: https://github.com/iSEE-Laboratory/VLN-PRET.