 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenHAIV: A Framework Towards Practical Open-World Learning
Aug 10, 2025Substantial progress has been made in various techniques for open-world recognition. Out-of-distribution (OOD) detection methods can effectively distinguish between known and unknown classes in the data, while incremental learning enables continuous model knowledge updates. However, in open-world scenarios, these approaches still face limitations. Relying solely on OOD detection does not facilitate knowledge updates in the model, and incremental fine-tuning typically requires supervised conditions, which significantly deviate from open-world settings. To address these challenges, this paper proposes OpenHAIV, a novel framework that integrates OOD detection, new class discovery, and incremental continual fine-tuning into a unified pipeline. This framework allows models to autonomously acquire and update knowledge in open-world environments. The proposed framework is available at https://haiv-lab.github.io/openhaiv .
OpenEarthSensing: Large-Scale Fine-Grained Benchmark for Open-World Remote Sensing
Feb 28, 2025
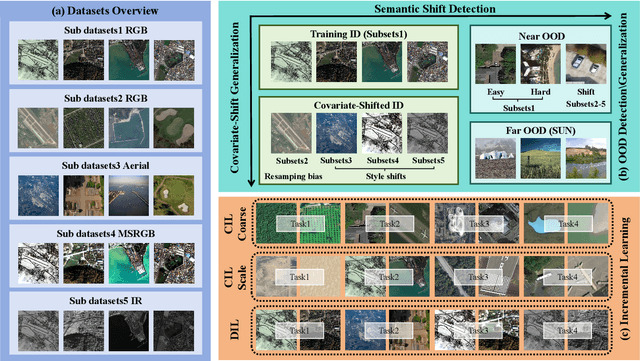
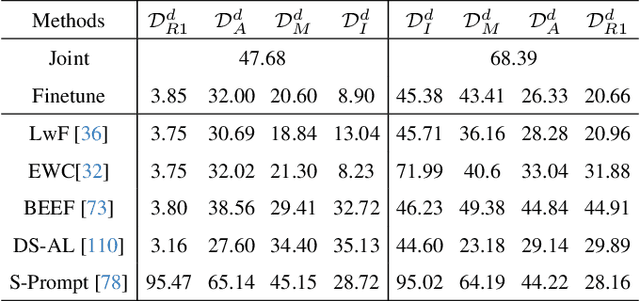
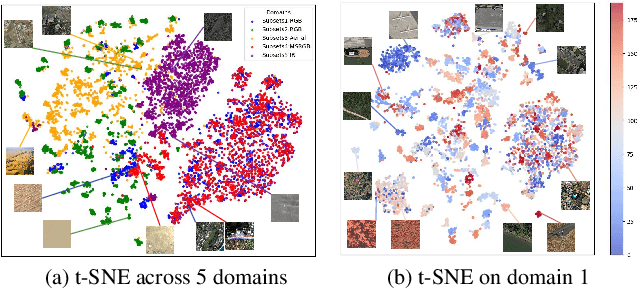
In open-world remote sensing, deployed models must continuously adapt to a steady influx of new data, which often exhibits various shifts compared to what the model encountered during the training phase. To effectively handle the new data, models are required to detect semantic shifts, adapt to covariate shifts, and continuously update themselves. These challenges give rise to a variety of open-world tasks. However, existing open-world remote sensing studies typically train and test within a single dataset to simulate open-world conditions. Currently, there is a lack of large-scale benchmarks capable of evaluating multiple open-world tasks. In this paper, we introduce OpenEarthSensing, a large-scale fine-grained benchmark for open-world remote sensing. OpenEarthSensing includes 189 scene and objects categories, covering the vast majority of potential semantic shifts that may occur in the real world. Additionally, OpenEarthSensing encompasses five data domains with significant covariate shifts, including two RGB satellite domians, one RGB aerial domian, one MS RGB domian, and one infrared domian. The various domains provide a more comprehensive testbed for evaluating the generalization performance of open-world models. We conduct the baseline evaluation of current mainstream open-world tasks and methods on OpenEarthSensing, demonstrating that it serves as a challenging benchmark for open-world remote sensing.
YOLOOC: YOLO-based Open-Class Incremental Object Detection with Novel Class Discovery
Mar 30, 2024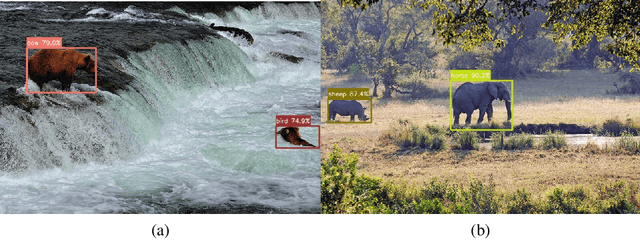
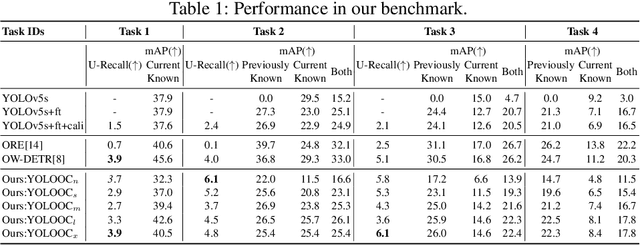
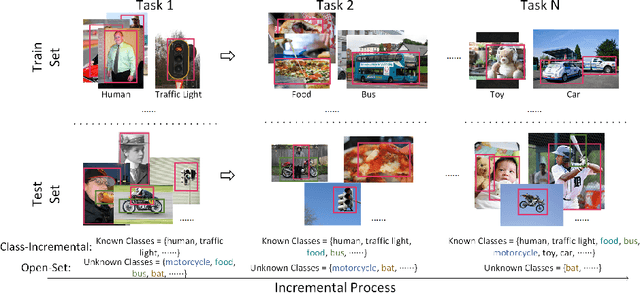
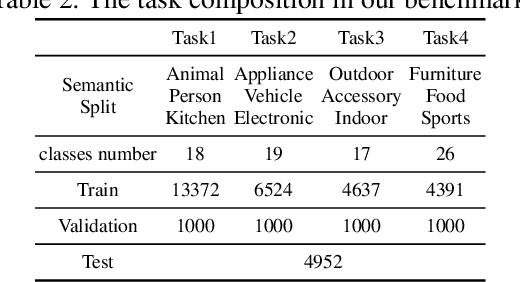
Because of its use in practice, open-world object detection (OWOD) has gotten a lot of attention recently. The challenge is how can a model detect novel classes and then incrementally learn them without forgetting previously known classes. Previous approaches hinge on strongly-supervised or weakly-supervised novel-class data for novel-class detection, which may not apply to real applications. We construct a new benchmark that novel classes are only encountered at the inference stage. And we propose a new OWOD detector YOLOOC, based on the YOLO architecture yet for the Open-Class setup. We introduce label smoothing to prevent the detector from over-confidently mapping novel classes to known classes and to discover novel classes. Extensive experiments conducted on our more realistic setup demonstrate the effectiveness of our method for discovering novel classes in our new benchmark.
Semantically-Shifted Incremental Adapter-Tuning is A Continual ViTransformer
Mar 29, 2024
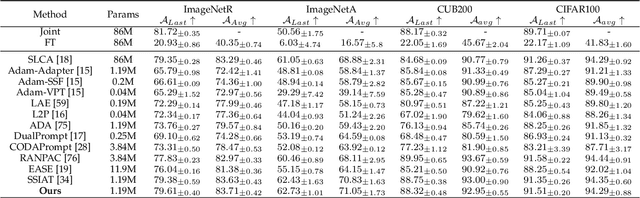
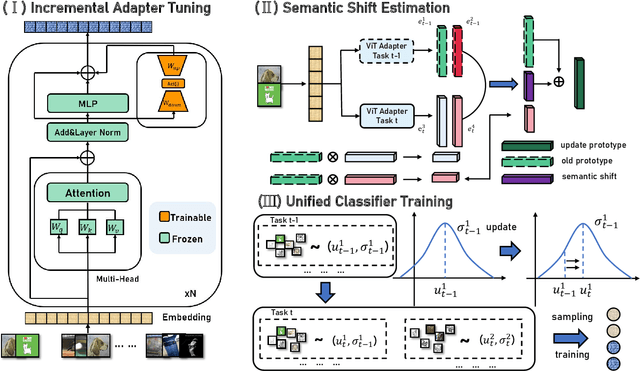
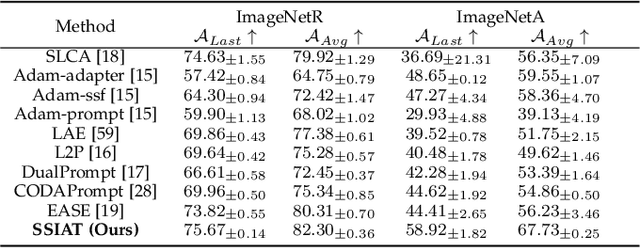
Class-incremental learning (CIL) aims to enable models to continuously learn new classes while overcoming catastrophic forgetting. The introduction of pre-trained models has brought new tuning paradigms to CIL. In this paper, we revisit different parameter-efficient tuning (PET) methods within the context of continual learning. We observe that adapter tuning demonstrates superiority over prompt-based methods, even without parameter expansion in each learning session. Motivated by this, we propose incrementally tuning the shared adapter without imposing parameter update constraints, enhancing the learning capacity of the backbone. Additionally, we employ feature sampling from stored prototypes to retrain a unified classifier, further improving its performance. We estimate the semantic shift of old prototypes without access to past samples and update stored prototypes session by session. Our proposed method eliminates model expansion and avoids retaining any image samples. It surpasses previous pre-trained model-based CIL methods and demonstrates remarkable continual learning capabilities. Experimental results on five CIL benchmarks validate the effectiveness of our approach, achieving state-of-the-art (SOTA) performance.
Enhancing the General Agent Capabilities of Low-Parameter LLMs through Tuning and Multi-Branch Reasoning
Mar 29, 2024



Open-source pre-trained Large Language Models (LLMs) exhibit strong language understanding and generation capabilities, making them highly successful in a variety of tasks. However, when used as agents for dealing with complex problems in the real world, their performance is far inferior to large commercial models such as ChatGPT and GPT-4. As intelligent agents, LLMs need to have the capabilities of task planning, long-term memory, and the ability to leverage external tools to achieve satisfactory performance. Various methods have been proposed to enhance the agent capabilities of LLMs. On the one hand, methods involve constructing agent-specific data and fine-tuning the models. On the other hand, some methods focus on designing prompts that effectively activate the reasoning abilities of the LLMs. We explore both strategies on the 7B and 13B models. We propose a comprehensive method for constructing agent-specific data using GPT-4. Through supervised fine-tuning with constructed data, we find that for these models with a relatively small number of parameters, supervised fine-tuning can significantly reduce hallucination outputs and formatting errors in agent tasks. Furthermore, techniques such as multi-path reasoning and task decomposition can effectively decrease problem complexity and enhance the performance of LLMs as agents. We evaluate our method on five agent tasks of AgentBench and achieve satisfactory results.