 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAHA: Supervised Autonomous HArvester for selective forest thinning
Jan 03, 2026Forestry plays a vital role in our society, creating significant ecological, economic, and recreational value. Efficient forest management involves labor-intensive and complex operations. One essential task for maintaining forest health and productivity is selective thinning, which requires skilled operators to remove specific trees to create optimal growing conditions for the remaining ones. In this work, we present a solution based on a small-scale robotic harvester (SAHA) designed for executing this task with supervised autonomy. We build on a 4.5-ton harvester platform and implement key hardware modifications for perception and automatic control. We implement learning- and model-based approaches for precise control of hydraulic actuators, accurate navigation through cluttered environments, robust state estimation, and reliable semantic estimation of terrain traversability. Integrating state-of-the-art techniques in perception, planning, and control, our robotic harvester can autonomously navigate forest environments and reach targeted trees for selective thinning. We present experimental results from extensive field trials over kilometer-long autonomous missions in northern European forests, demonstrating the harvester's ability to operate in real forests. We analyze the performance and provide the lessons learned for advancing robotic forest management.
Explosive Output to Enhance Jumping Ability: A Variable Reduction Ratio Design Paradigm for Humanoid Robots Knee Joint
Jun 14, 2025Enhancing the explosive power output of the knee joints is critical for improving the agility and obstacle-crossing capabilities of humanoid robots. However, a mismatch between the knee-to-center-of-mass (CoM) transmission ratio and jumping demands, coupled with motor performance degradation at high speeds, restricts the duration of high-power output and limits jump performance. To address these problems, this paper introduces a novel knee joint design paradigm employing a dynamically decreasing reduction ratio for explosive output during jump. Analysis of motor output characteristics and knee kinematics during jumping inspired a coupling strategy in which the reduction ratio gradually decreases as the joint extends. A high initial ratio rapidly increases torque at jump initiation, while its gradual reduction minimizes motor speed increments and power losses, thereby maintaining sustained high-power output. A compact and efficient linear actuator-driven guide-rod mechanism realizes this coupling strategy, supported by parameter optimization guided by explosive jump control strategies. Experimental validation demonstrated a 63 cm vertical jump on a single-joint platform (a theoretical improvement of 28.1\% over the optimal fixed-ratio joints). Integrated into a humanoid robot, the proposed design enabled a 1.1 m long jump, a 0.5 m vertical jump, and a 0.5 m box jump.
PiercingEye: Dual-Space Video Violence Detection with Hyperbolic Vision-Language Guidance
Apr 26, 2025Existing weakly supervised video violence detection (VVD) methods primarily rely on Euclidean representation learning, which often struggles to distinguish visually similar yet semantically distinct events due to limited hierarchical modeling and insufficient ambiguous training samples. To address this challenge, we propose PiercingEye, a novel dual-space learning framework that synergizes Euclidean and hyperbolic geometries to enhance discriminative feature representation. Specifically, PiercingEye introduces a layer-sensitive hyperbolic aggregation strategy with hyperbolic Dirichlet energy constraints to progressively model event hierarchies, and a cross-space attention mechanism to facilitate complementary feature interactions between Euclidean and hyperbolic spaces. Furthermore, to mitigate the scarcity of ambiguous samples, we leverage large language models to generate logic-guided ambiguous event descriptions, enabling explicit supervision through a hyperbolic vision-language contrastive loss that prioritizes high-confusion samples via dynamic similarity-aware weighting. Extensive experiments on XD-Violence and UCF-Crime benchmarks demonstrate that PiercingEye achieves state-of-the-art performance, with particularly strong results on a newly curated ambiguous event subset, validating its superior capability in fine-grained violence detection.
A boundary-aware point clustering approach in Euclidean and embedding spaces for roof plane segmentation
Sep 07, 2023
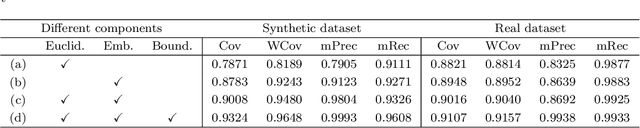

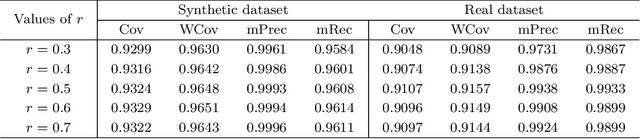
Roof plane segmentation from airborne LiDAR point clouds is an important technology for 3D building model reconstruction. One of the key issues of plane segmentation is how to design powerful features that can exactly distinguish adjacent planar patches. The quality of point feature directly determines the accuracy of roof plane segmentation. Most of existing approaches use handcrafted features to extract roof planes. However, the abilities of these features are relatively low, especially in boundary area. To solve this problem, we propose a boundary-aware point clustering approach in Euclidean and embedding spaces constructed by a multi-task deep network for roof plane segmentation. We design a three-branch network to predict semantic labels, point offsets and extract deep embedding features. In the first branch, we classify the input data as non-roof, boundary and plane points. In the second branch, we predict point offsets for shifting each point toward its respective instance center. In the third branch, we constrain that points of the same plane instance should have the similar embeddings. We aim to ensure that points of the same plane instance are close as much as possible in both Euclidean and embedding spaces. However, although deep network has strong feature representative ability, it is still hard to accurately distinguish points near plane instance boundary. Therefore, we first group plane points into many clusters in the two spaces, and then we assign the rest boundary points to their closest clusters to generate final complete roof planes. In this way, we can effectively reduce the influence of unreliable boundary points. In addition, we construct a synthetic dataset and a real dataset to train and evaluate our approach. The experiments results show that the proposed approach significantly outperforms the existing state-of-the-art approaches.
ABODE-Net: An Attention-based Deep Learning Model for Non-intrusive Building Occupancy Detection Using Smart Meter Data
Dec 21, 2022Occupancy information is useful for efficient energy management in the building sector. The massive high-resolution electrical power consumption data collected by smart meters in the advanced metering infrastructure (AMI) network make it possible to infer buildings' occupancy status in a non-intrusive way. In this paper, we propose a deep leaning model called ABODE-Net which employs a novel Parallel Attention (PA) block for building occupancy detection using smart meter data. The PA block combines the temporal, variable, and channel attention modules in a parallel way to signify important features for occupancy detection. We adopt two smart meter datasets widely used for building occupancy detection in our performance evaluation. A set of state-of-the-art shallow machine learning and deep learning models are included for performance comparison. The results show that ABODE-Net significantly outperforms other models in all experimental cases, which proves its validity as a solution for non-intrusive building occupancy detection.
Multi-Modal Lidar Dataset for Benchmarking General-Purpose Localization and Mapping Algorithms
Mar 07, 2022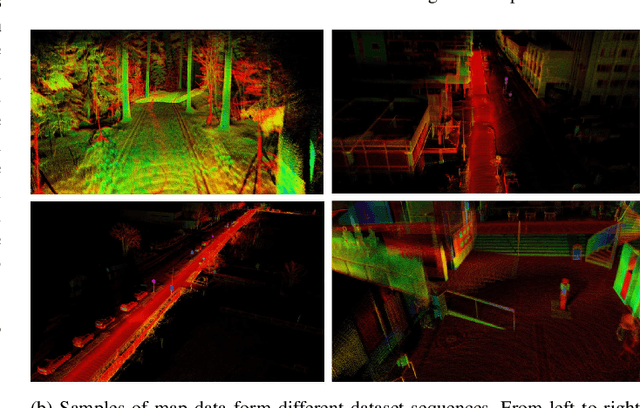
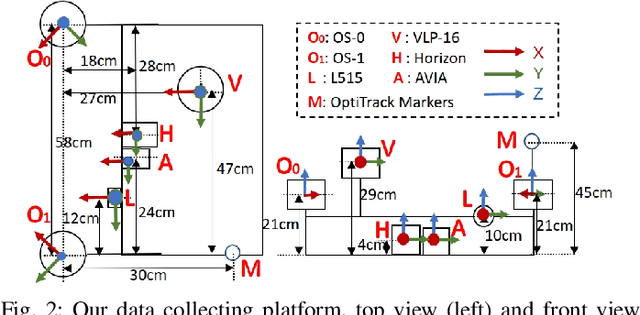
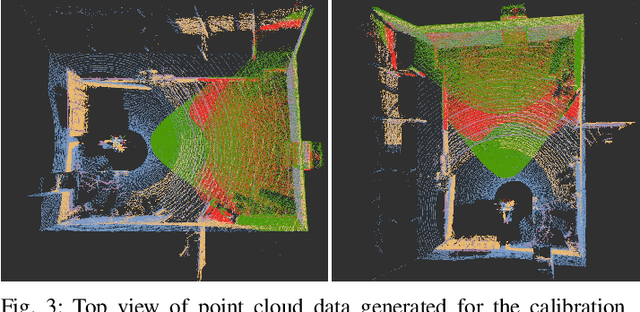
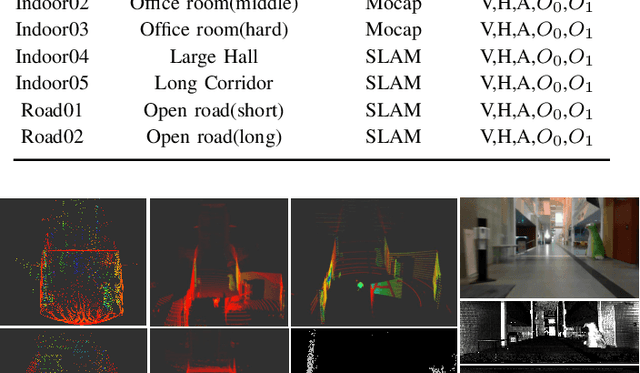
Lidar technology has evolved significantly over the last decade, with higher resolution, better accuracy, and lower cost devices available today. In addition, new scanning modalities and novel sensor technologies have emerged in recent years. Public datasets have enabled benchmarking of algorithms and have set standards for the cutting edge technology. However, existing datasets are not representative of the technological landscape, with only a reduced number of lidars available. This inherently limits the development and comparison of general-purpose algorithms in the evolving landscape. This paper presents a novel multi-modal lidar dataset with sensors showcasing different scanning modalities (spinning and solid-state), sensing technologies, and lidar cameras. The focus of the dataset is on low-drift odometry, with ground truth data available in both indoors and outdoors environment with sub-millimeter accuracy from a motion capture (MOCAP) system. For comparison in longer distances, we also include data recorded in larger spaces indoors and outdoors. The dataset contains point cloud data from spinning lidars and solid-state lidars. Also, it provides range images from high resolution spinning lidars, RGB and depth images from a lidar camera, and inertial data from built-in IMUs. This is, to the best of our knowledge, the lidar dataset with the most variety of sensors and environments where ground truth data is available. This dataset can be widely used in multiple research areas, such as 3D LiDAR simultaneous localization and mapping (SLAM), performance comparison between multi-modal lidars, appearance recognition and loop closure detection. The datasets are available at: https://github.com/TIERS/tiers-lidars-dataset.
Applications of UWB Networks and Positioning to Autonomous Robots and Industrial Systems
Mar 28, 2021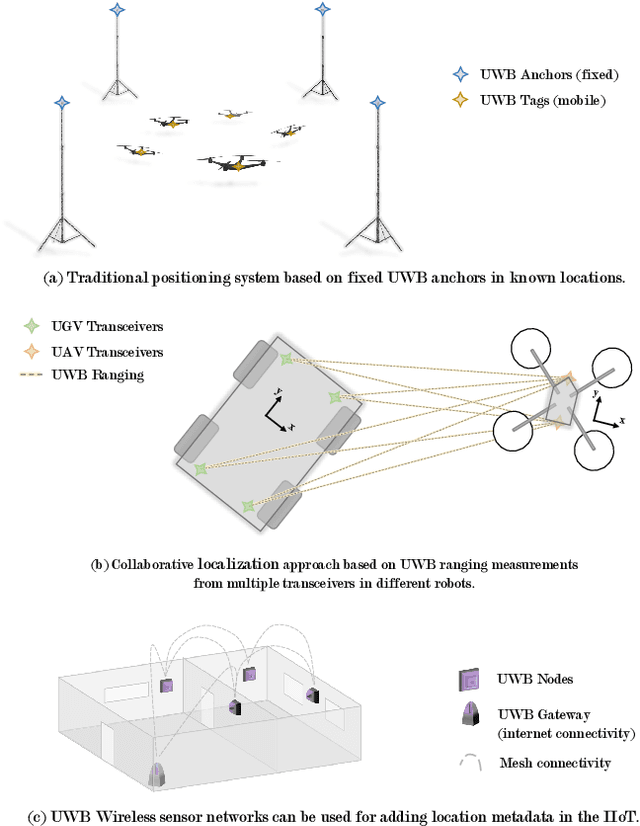
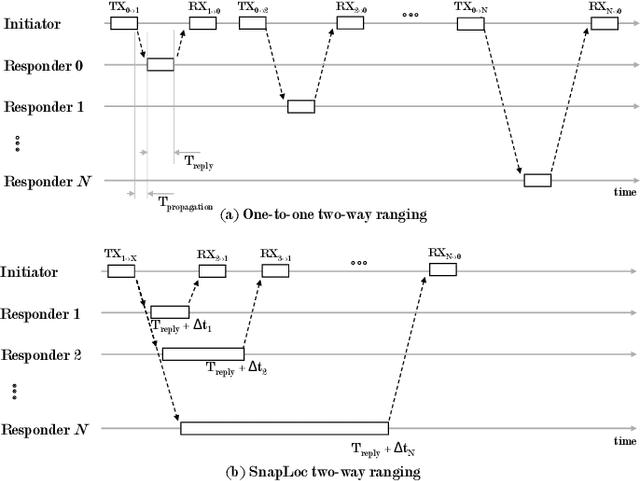
Ultra-wideband (UWB) technology is a mature technology that contested other wireless technologies in the advent of the IoT but did not achieve the same levels of widespread adoption. In recent years, however, with its potential as a wireless ranging and localization solution, it has regained momentum. Within the robotics field, UWB positioning systems are being increasingly adopted for localizing autonomous ground or aerial robots. In the Industrial IoT (IIoT) domain, its potential for ad-hoc networking and simultaneous positioning is also being explored. This survey overviews the state-of-the-art in UWB networking and localization for robotic and autonomous systems. We also cover novel techniques focusing on more scalable systems, collaborative approaches to localization, ad-hoc networking, and solutions involving machine learning to improve accuracy. This is, to the best of our knowledge, the first survey to put together the robotics and IIoT perspectives and to emphasize novel ranging and positioning modalities. We complete the survey with a discussion on current trends and open research problems.
Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation
May 12, 2020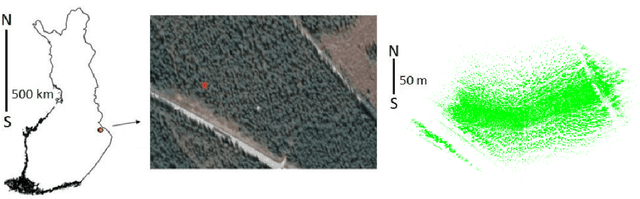
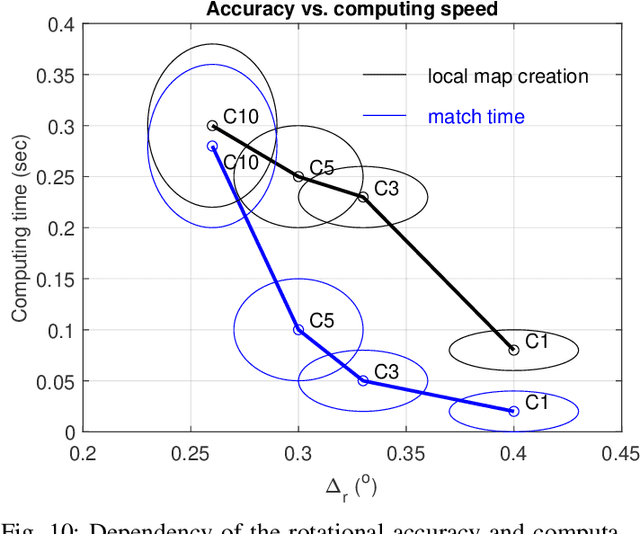

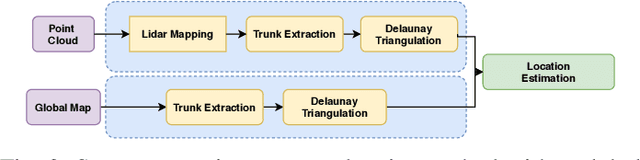
Autonomous harvesting and transportation is a long-term goal of the forest industry. One of the main challenges is the accurate localization of both vehicles and trees in a forest. Forests are unstructured environments where it is difficult to find a group of significant landmarks for current fast feature-based place recognition algorithms. This paper proposes a novel approach where local observations are matched to a general tree map using the Delaunay triangularization as the representation format. Instead of point cloud based matching methods, we utilize a topology-based method. First, tree trunk positions are registered at a prior run done by a forest harvester. Second, the resulting map is Delaunay triangularized. Third, a local submap of the autonomous robot is registered, triangularized and matched using triangular similarity maximization to estimate the position of the robot. We test our method on a dataset accumulated from a forestry site at Lieksa, Finland. A total length of 2100\,m of harvester path was recorded by an industrial harvester with a 3D laser scanner and a geolocation unit fixed to the frame. Our experiments show a 12\,cm s.t.d. in the location accuracy and with real-time data processing for speeds not exceeding 0.5\,m/s. The accuracy and speed limit is realistic during forest operations.