 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term Autonomy in Forest Environment using Self-Corrective SLAM
Jan 05, 2021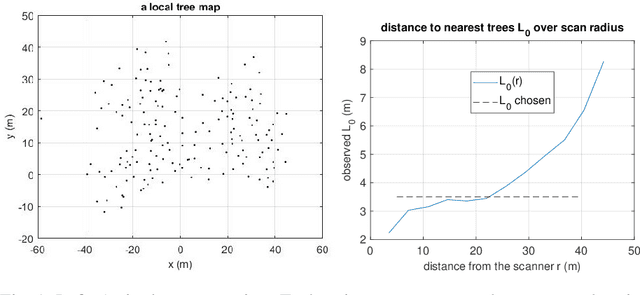

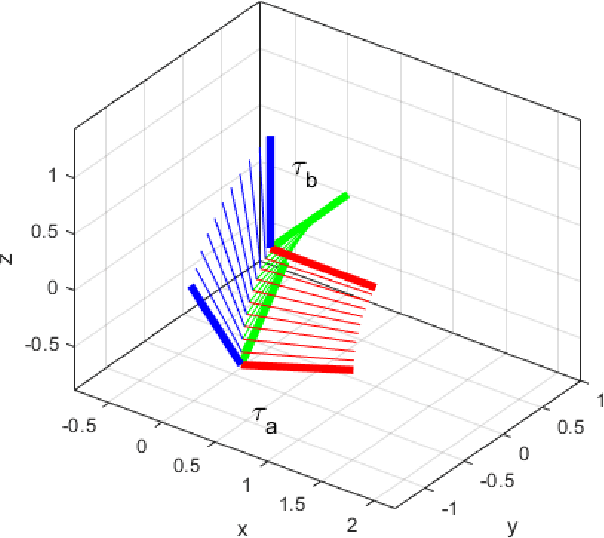
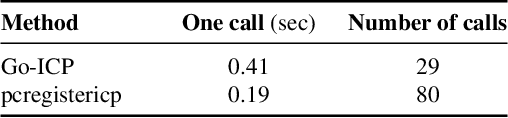
Vehicles with prolonged autonomous missions have to maintain environment awareness by simultaneous localization and mapping (SLAM). Closed loop correction is substituted by interpolation in rigid body transformation space in order to systematically reduce the accumulated error over different scales. The computation is divided to an edge computed lightweight SLAM and iterative corrections in the cloud environment. Tree locations in the forest environment are sent via a potentially limited communication bandwidths. Data from a real forest site is used in the verification of the proposed algorithm. The algorithm adds new iterative closest point (ICP) cases to the initial SLAM and measures the resulting map quality by the mean of the root mean squared error (RMSE) of individual tree clusters. Adding 4% more match cases yields the mean RMSE 0.15 m on a large site with 180 m odometric distance.
Estimating the Prediction Performance of Spatial Models via Spatial k-Fold Cross Validation
May 28, 2020In machine learning one often assumes the data are independent when evaluating model performance. However, this rarely holds in practise. Geographic information data sets are an example where the data points have stronger dependencies among each other the closer they are geographically. This phenomenon known as spatial autocorrelation (SAC) causes the standard cross validation (CV) methods to produce optimistically biased prediction performance estimates for spatial models, which can result in increased costs and accidents in practical applications. To overcome this problem we propose a modified version of the CV method called spatial k-fold cross validation (SKCV), which provides a useful estimate for model prediction performance without optimistic bias due to SAC. We test SKCV with three real world cases involving open natural data showing that the estimates produced by the ordinary CV are up to 40% more optimistic than those of SKCV. Both regression and classification cases are considered in our experiments. In addition, we will show how the SKCV method can be applied as a criterion for selecting data sampling density for new research area.
* 18 pages, 12 figures, 1 table
Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation
May 12, 2020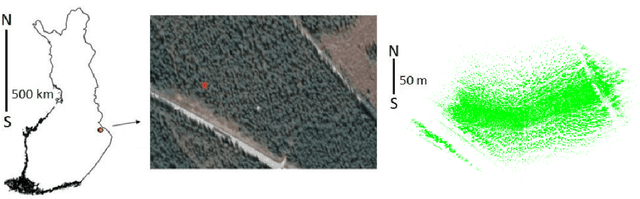
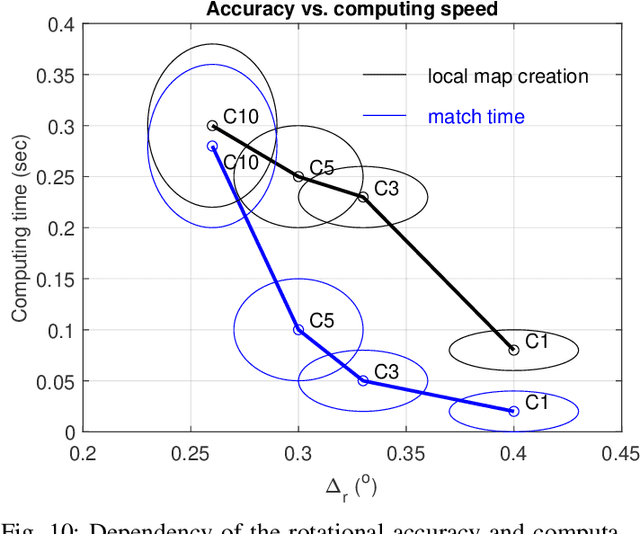

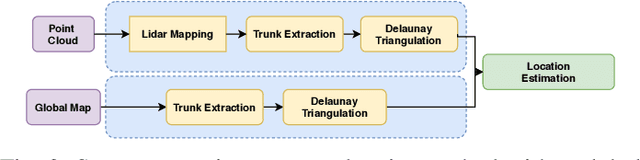
Autonomous harvesting and transportation is a long-term goal of the forest industry. One of the main challenges is the accurate localization of both vehicles and trees in a forest. Forests are unstructured environments where it is difficult to find a group of significant landmarks for current fast feature-based place recognition algorithms. This paper proposes a novel approach where local observations are matched to a general tree map using the Delaunay triangularization as the representation format. Instead of point cloud based matching methods, we utilize a topology-based method. First, tree trunk positions are registered at a prior run done by a forest harvester. Second, the resulting map is Delaunay triangularized. Third, a local submap of the autonomous robot is registered, triangularized and matched using triangular similarity maximization to estimate the position of the robot. We test our method on a dataset accumulated from a forestry site at Lieksa, Finland. A total length of 2100\,m of harvester path was recorded by an industrial harvester with a 3D laser scanner and a geolocation unit fixed to the frame. Our experiments show a 12\,cm s.t.d. in the location accuracy and with real-time data processing for speeds not exceeding 0.5\,m/s. The accuracy and speed limit is realistic during forest operations.