 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA boundary-aware point clustering approach in Euclidean and embedding spaces for roof plane segmentation
Sep 07, 2023
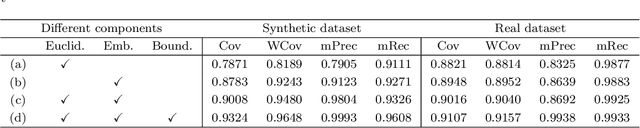

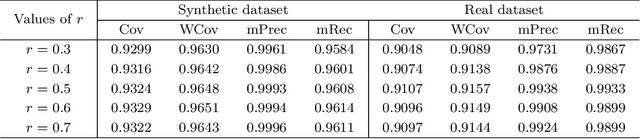
Roof plane segmentation from airborne LiDAR point clouds is an important technology for 3D building model reconstruction. One of the key issues of plane segmentation is how to design powerful features that can exactly distinguish adjacent planar patches. The quality of point feature directly determines the accuracy of roof plane segmentation. Most of existing approaches use handcrafted features to extract roof planes. However, the abilities of these features are relatively low, especially in boundary area. To solve this problem, we propose a boundary-aware point clustering approach in Euclidean and embedding spaces constructed by a multi-task deep network for roof plane segmentation. We design a three-branch network to predict semantic labels, point offsets and extract deep embedding features. In the first branch, we classify the input data as non-roof, boundary and plane points. In the second branch, we predict point offsets for shifting each point toward its respective instance center. In the third branch, we constrain that points of the same plane instance should have the similar embeddings. We aim to ensure that points of the same plane instance are close as much as possible in both Euclidean and embedding spaces. However, although deep network has strong feature representative ability, it is still hard to accurately distinguish points near plane instance boundary. Therefore, we first group plane points into many clusters in the two spaces, and then we assign the rest boundary points to their closest clusters to generate final complete roof planes. In this way, we can effectively reduce the influence of unreliable boundary points. In addition, we construct a synthetic dataset and a real dataset to train and evaluate our approach. The experiments results show that the proposed approach significantly outperforms the existing state-of-the-art approaches.
Vanishing Point Guided Natural Image Stitching
Apr 06, 2020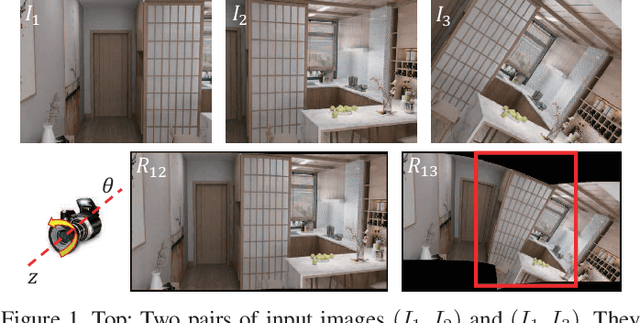
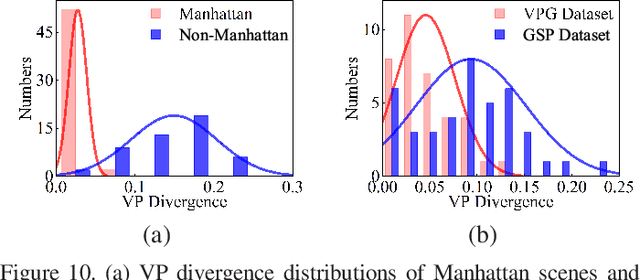
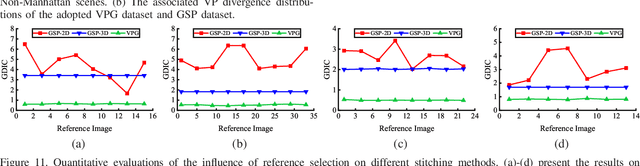
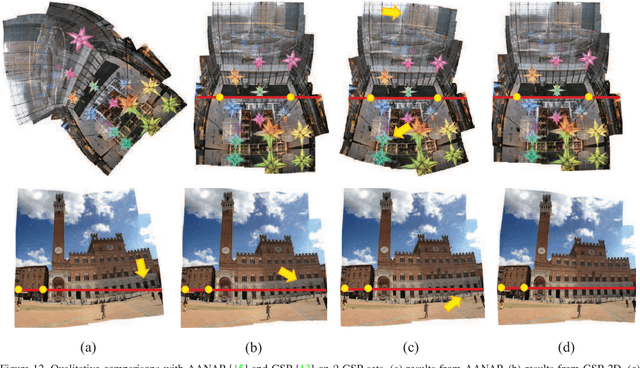
Recently, works on improving the naturalness of stitching images gain more and more extensive attention. Previous methods suffer the failures of severe projective distortion and unnatural rotation, especially when the number of involved images is large or images cover a very wide field of view. In this paper, we propose a novel natural image stitching method, which takes into account the guidance of vanishing points to tackle the mentioned failures. Inspired by a vital observation that mutually orthogonal vanishing points in Manhattan world can provide really useful orientation clues, we design a scheme to effectively estimate prior of image similarity. Given such estimated prior as global similarity constraints, we feed it into a popular mesh deformation framework to achieve impressive natural stitching performances. Compared with other existing methods, including APAP, SPHP, AANAP, and GSP, our method achieves state-of-the-art performance in both quantitative and qualitative experiments on natural image stitching.
Generalized Content-Preserving Warps for Image Stitching
Sep 18, 2018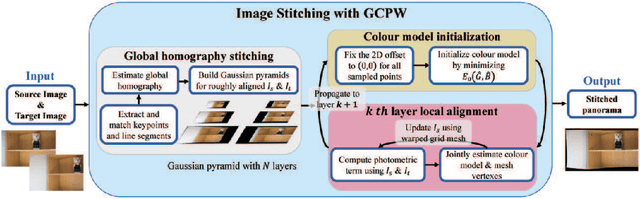
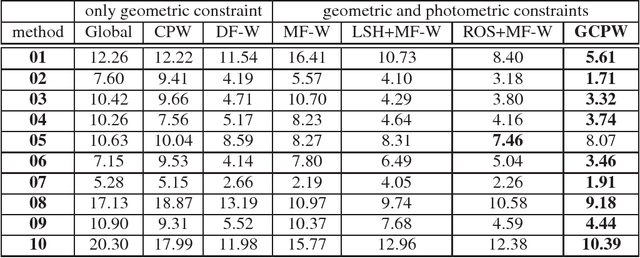
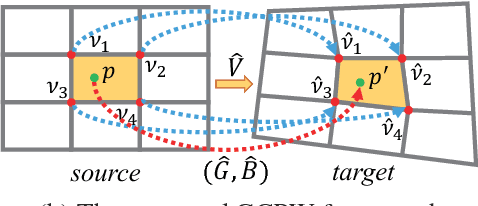
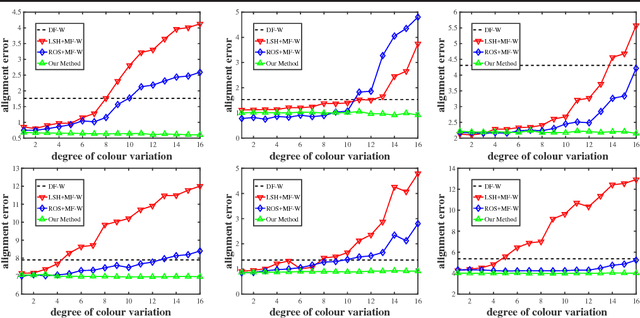
Local misalignment caused by global homography is a common issue in image stitching task. Content-Preserving Warping (CPW) is a typical method to deal with this issue, in which geometric and photometric constraints are imposed to guide the warping process. One of its essential condition however, is colour consistency, and an elusive goal in real world applications. In this paper, we propose a Generalized Content-Preserving Warping (GCPW) method to alleviate this problem. GCPW extends the original CPW by applying a colour model that expresses the colour transformation between images locally, thus meeting the photometric constraint requirements for effective image stitching. We combine the photometric and geometric constraints and jointly estimate the colour transformation and the warped mesh vertexes, simultaneously. We align images locally with an optimal grid mesh generated by our GCPW method. Experiments on both synthetic and real images demonstrate that our new method is robust to colour variations, outperforming other state-of-the-art CPW-based image stitching methods.
Multiple Combined Constraints for Image Stitching
Sep 18, 2018



Several approaches to image stitching use different constraints to estimate the motion model between image pairs. These constraints can be roughly divided into two categories: geometric constraints and photometric constraints. In this paper, geometric and photometric constraints are combined to improve the alignment quality, which is based on the observation that these two kinds of constraints are complementary. On the one hand, geometric constraints (e.g., point and line correspondences) are usually spatially biased and are insufficient in some extreme scenes, while photometric constraints are always evenly and densely distributed. On the other hand, photometric constraints are sensitive to displacements and are not suitable for images with large parallaxes, while geometric constraints are usually imposed by feature matching and are more robust to handle parallaxes. The proposed method therefore combines them together in an efficient mesh-based image warping framework. It achieves better alignment quality than methods only with geometric constraints, and can handle larger parallax than photometric-constraint-based method. Experimental results on various images illustrate that the proposed method outperforms representative state-of-the-art image stitching methods reported in the literature.