 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAFEVPR: Patch-Based Conformal Verification for Safe Cross-Condition Sequence Visual Place Recognition
May 27, 2026Sequence-based visual place recognition (VPR) for SLAM and robot relocalization must decide whether the retrieved top-1 candidate is safe to accept. Conformal prediction is a natural framework for this accept/reject decision, but its finite-sample guarantees rely on exchangeability between calibration and deployment (test) data, which is violated under cross-condition deployment. We introduce SAFEVPR, a non-trainable verification-and-calibration pipeline for safe cross-condition sequence VPR. SAFEVPR replaces the standard backbone cosine similarity with a mutual-nearest-neighbour (MNN) patch-matching score computed from frozen DINOv2 ViT features, and replaces flat Learn-Then-Test calibration with Mondrian conformal LTT, fitting separate Bonferroni-corrected thresholds across score bins. Under exchangeability, these thresholds would provide finite-sample false-discovery-rate (FDR) control; under condition shift, we evaluate empirical validity per deployment. Across 23 cross-condition setups from Oxford RobotCar, NCLT, and St Lucia datasets, using three frozen VPR backbones, SAFEVPR is empirically valid on 23/23 setups at target FDR alpha = 0.10, achieving mean accepted FDR 0.014 and mean true-positive rate (TPR) 0.75. The results show that raw discrimination alone is not sufficient for conformal validity: AnyLoc-VLAD and Super-Point+LightGlue reach comparable area under the receiver operating characteristic curve (AUROC) but fail more setups under the same calibration. On textureless repetitive scenery, SAFEVPR safely abstains rather than accepting unreliable matches. Code is available at https://github.com/Hasar12139/SafeVPR.
Seamless Outdoor-Indoor Pedestrian Positioning System with GNSS/UWB/IMU Fusion: A Comparison of EKF, FGO, and PF
Dec 11, 2025Accurate and continuous pedestrian positioning across outdoor-indoor environments remains challenging because GNSS, UWB, and inertial PDR are complementary yet individually fragile under signal blockage, multipath, and drift. This paper presents a unified GNSS/UWB/IMU fusion framework for seamless pedestrian localization and provides a controlled comparison of three probabilistic back-ends: an error-state extended Kalman filter, sliding-window factor graph optimization, and a particle filter. The system uses chest-mounted IMU-based PDR as the motion backbone and integrates absolute updates from GNSS outdoors and UWB indoors. To enhance transition robustness and mitigate urban GNSS degradation, we introduce a lightweight map-based feasibility constraint derived from OpenStreetMap building footprints, treating most building interiors as non-navigable while allowing motion inside a designated UWB-instrumented building. The framework is implemented in ROS 2 and runs in real time on a wearable platform, with visualization in Foxglove. We evaluate three scenarios: indoor (UWB+PDR), outdoor (GNSS+PDR), and seamless outdoor-indoor (GNSS+UWB+PDR). Results show that the ESKF provides the most consistent overall performance in our implementation.
A Sensor-Aware Phenomenological Framework for Lidar Degradation Simulation and SLAM Robustness Evaluation
Dec 09, 2025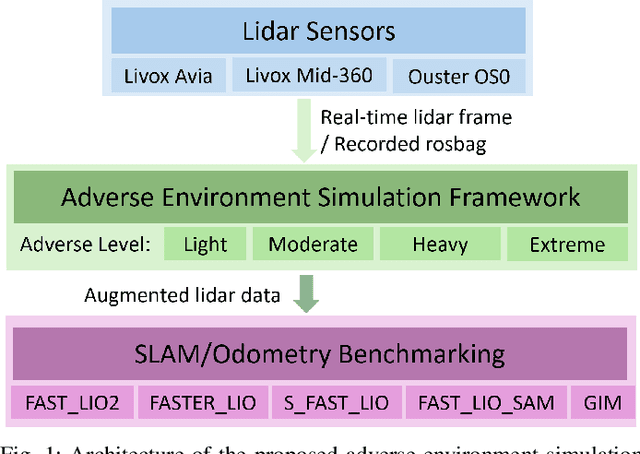
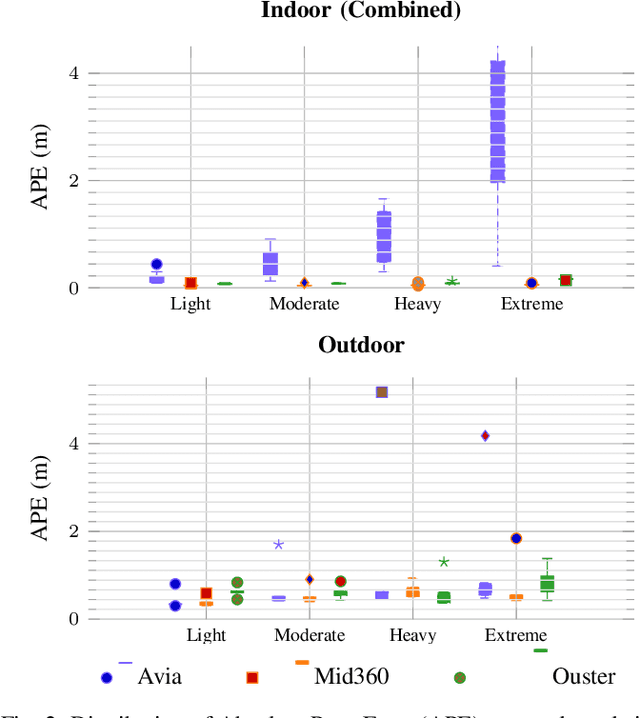
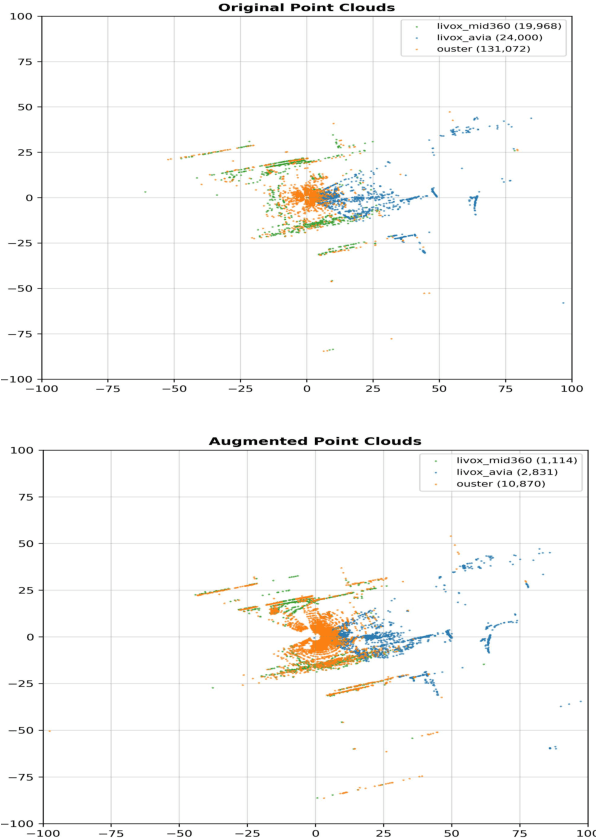
Lidar-based SLAM systems are highly sensitive to adverse conditions such as occlusion, noise, and field-of-view (FoV) degradation, yet existing robustness evaluation methods either lack physical grounding or do not capture sensor-specific behavior. This paper presents a sensor-aware, phenomenological framework for simulating interpretable lidar degradations directly on real point clouds, enabling controlled and reproducible SLAM stress testing. Unlike image-derived corruption benchmarks (e.g., SemanticKITTI-C) or simulation-only approaches (e.g., lidarsim), the proposed system preserves per-point geometry, intensity, and temporal structure while applying structured dropout, FoV reduction, Gaussian noise, occlusion masking, sparsification, and motion distortion. The framework features autonomous topic and sensor detection, modular configuration with four severity tiers (light--extreme), and real-time performance (less than 20 ms per frame) compatible with ROS workflows. Experimental validation across three lidar architectures and five state-of-the-art SLAM systems reveals distinct robustness patterns shaped by sensor design and environmental context. The open-source implementation provides a practical foundation for benchmarking lidar-based SLAM under physically meaningful degradation scenarios.
Degradation-Aware Cooperative Multi-Modal GNSS-Denied Localization Leveraging LiDAR-Based Robot Detections
Oct 23, 2025Accurate long-term localization using onboard sensors is crucial for robots operating in Global Navigation Satellite System (GNSS)-denied environments. While complementary sensors mitigate individual degradations, carrying all the available sensor types on a single robot significantly increases the size, weight, and power demands. Distributing sensors across multiple robots enhances the deployability but introduces challenges in fusing asynchronous, multi-modal data from independently moving platforms. We propose a novel adaptive multi-modal multi-robot cooperative localization approach using a factor-graph formulation to fuse asynchronous Visual-Inertial Odometry (VIO), LiDAR-Inertial Odometry (LIO), and 3D inter-robot detections from distinct robots in a loosely-coupled fashion. The approach adapts to changing conditions, leveraging reliable data to assist robots affected by sensory degradations. A novel interpolation-based factor enables fusion of the unsynchronized measurements. LIO degradations are evaluated based on the approximate scan-matching Hessian. A novel approach of weighting odometry data proportionally to the Wasserstein distance between the consecutive VIO outputs is proposed. A theoretical analysis is provided, investigating the cooperative localization problem under various conditions, mainly in the presence of sensory degradations. The proposed method has been extensively evaluated on real-world data gathered with heterogeneous teams of an Unmanned Ground Vehicle (UGV) and Unmanned Aerial Vehicles (UAVs), showing that the approach provides significant improvements in localization accuracy in the presence of various sensory degradations.
Enhancing Lidar Point Cloud Sampling via Colorization and Super-Resolution of Lidar Imagery
May 04, 2025Recent advancements in lidar technology have led to improved point cloud resolution as well as the generation of 360 degrees, low-resolution images by encoding depth, reflectivity, or near-infrared light within each pixel. These images enable the application of deep learning (DL) approaches, originally developed for RGB images from cameras to lidar-only systems, eliminating other efforts, such as lidar-camera calibration. Compared with conventional RGB images, lidar imagery demonstrates greater robustness in adverse environmental conditions, such as low light and foggy weather. Moreover, the imaging capability addresses the challenges in environments where the geometric information in point clouds may be degraded, such as long corridors, and dense point clouds may be misleading, potentially leading to drift errors. Therefore, this paper proposes a novel framework that leverages DL-based colorization and super-resolution techniques on lidar imagery to extract reliable samples from lidar point clouds for odometry estimation. The enhanced lidar images, enriched with additional information, facilitate improved keypoint detection, which is subsequently employed for more effective point cloud downsampling. The proposed method enhances point cloud registration accuracy and mitigates mismatches arising from insufficient geometric information or misleading extra points. Experimental results indicate that our approach surpasses previous methods, achieving lower translation and rotation errors while using fewer points.
Dual-Criterion Model Aggregation in Federated Learning: Balancing Data Quantity and Quality
Nov 12, 2024



Federated learning (FL) has become one of the key methods for privacy-preserving collaborative learning, as it enables the transfer of models without requiring local data exchange. Within the FL framework, an aggregation algorithm is recognized as one of the most crucial components for ensuring the efficacy and security of the system. Existing average aggregation algorithms typically assume that all client-trained data holds equal value or that weights are based solely on the quantity of data contributed by each client. In contrast, alternative approaches involve training the model locally after aggregation to enhance adaptability. However, these approaches fundamentally ignore the inherent heterogeneity between different clients' data and the complexity of variations in data at the aggregation stage, which may lead to a suboptimal global model. To address these issues, this study proposes a novel dual-criterion weighted aggregation algorithm involving the quantity and quality of data from the client node. Specifically, we quantify the data used for training and perform multiple rounds of local model inference accuracy evaluation on a specialized dataset to assess the data quality of each client. These two factors are utilized as weights within the aggregation process, applied through a dynamically weighted summation of these two factors. This approach allows the algorithm to adaptively adjust the weights, ensuring that every client can contribute to the global model, regardless of their data's size or initial quality. Our experiments show that the proposed algorithm outperforms several existing state-of-the-art aggregation approaches on both a general-purpose open-source dataset, CIFAR-10, and a dataset specific to visual obstacle avoidance.
Event-based Sensor Fusion and Application on Odometry: A Survey
Oct 20, 2024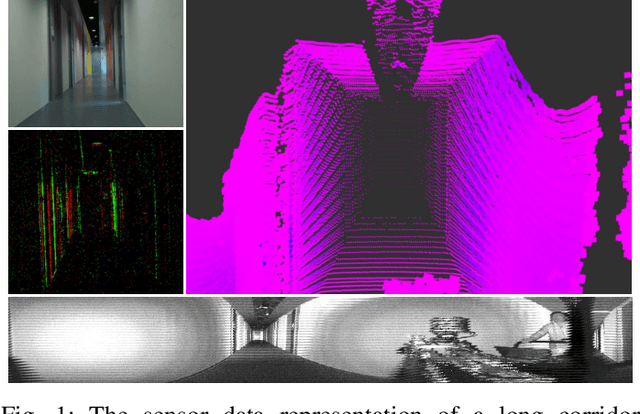

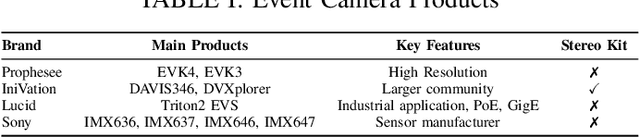

Event cameras, inspired by biological vision, are asynchronous sensors that detect changes in brightness, offering notable advantages in environments characterized by high-speed motion, low lighting, or wide dynamic range. These distinctive properties render event cameras particularly effective for sensor fusion in robotics and computer vision, especially in enhancing traditional visual or LiDAR-inertial odometry. Conventional frame-based cameras suffer from limitations such as motion blur and drift, which can be mitigated by the continuous, low-latency data provided by event cameras. Similarly, LiDAR-based odometry encounters challenges related to the loss of geometric information in environments such as corridors. To address these limitations, unlike the existing event camera-related surveys, this paper presents a comprehensive overview of recent advancements in event-based sensor fusion for odometry applications particularly, investigating fusion strategies that incorporate frame-based cameras, inertial measurement units (IMUs), and LiDAR. The survey critically assesses the contributions of these fusion methods to improving odometry performance in complex environments, while highlighting key applications, and discussing the strengths, limitations, and unresolved challenges. Additionally, it offers insights into potential future research directions to advance event-based sensor fusion for next-generation odometry applications.
Enhancing the Reliability of LiDAR Point Cloud Sampling: A Colorization and Super-Resolution Approach Based on LiDAR-Generated Images
Sep 17, 2024



In recent years, Light Detection and Ranging (LiDAR) technology, a critical sensor in robotics and autonomous systems, has seen significant advancements. These improvements include enhanced resolution of point clouds and the capability to provide 360{\deg} low-resolution images. These images encode various data such as depth, reflectivity, and near-infrared light within the pixels. However, an excessive density of points and conventional point cloud sampling can be counterproductive, particularly in applications such as LiDAR odometry, where misleading points and degraded geometry information may induce drift errors. Currently, extensive research efforts are being directed towards leveraging LiDAR-generated images to improve situational awareness. This paper presents a comprehensive review of current deep learning (DL) techniques, including colorization and super-resolution, which are traditionally utilized in conventional computer vision tasks. These techniques are applied to LiDAR-generated images and are analyzed qualitatively. Based on this analysis, we have developed a novel approach that selectively integrates the most suited colorization and super-resolution methods with LiDAR imagery to sample reliable points from the LiDAR point cloud. This approach aims to not only improve the accuracy of point cloud registration but also avoid mismatching caused by lacking geometry information, thereby augmenting the utility and precision of LiDAR systems in practical applications. In our evaluation, the proposed approach demonstrates superior performance compared to our previous work, achieving lower translation and rotation errors with a reduced number of points.
Towards Robust UAV Tracking in GNSS-Denied Environments: A Multi-LiDAR Multi-UAV Dataset
Oct 13, 2023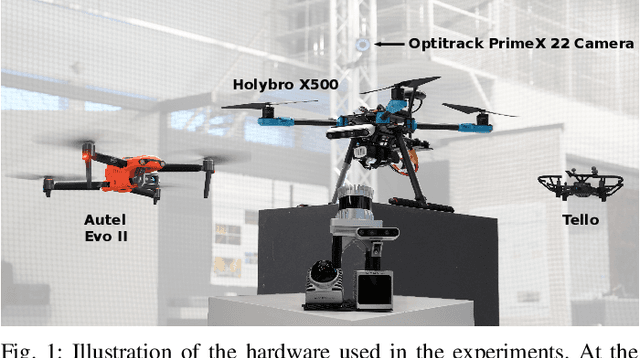
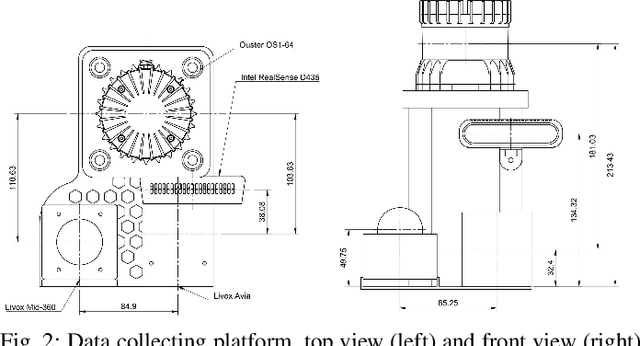
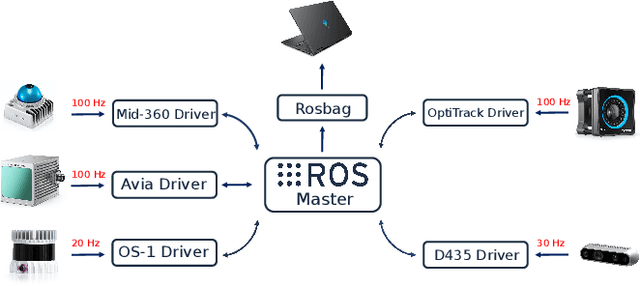
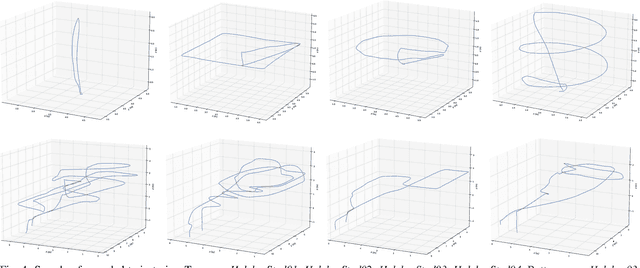
With the increasing prevalence of drones in various industries, the navigation and tracking of unmanned aerial vehicles (UAVs) in challenging environments, particularly GNSS-denied areas, have become crucial concerns. To address this need, we present a novel multi-LiDAR dataset specifically designed for UAV tracking. Our dataset includes data from a spinning LiDAR, two solid-state LiDARs with different Field of View (FoV) and scan patterns, and an RGB-D camera. This diverse sensor suite allows for research on new challenges in the field, including limited FoV adaptability and multi-modality data processing. The dataset facilitates the evaluation of existing algorithms and the development of new ones, paving the way for advances in UAV tracking techniques. Notably, we provide data in both indoor and outdoor environments. We also consider variable UAV sizes, from micro-aerial vehicles to more standard commercial UAV platforms. The outdoor trajectories are selected with close proximity to buildings, targeting research in UAV detection in urban areas, e.g., within counter-UAV systems or docking for UAV logistics. In addition to the dataset, we provide a baseline comparison with recent LiDAR-based UAV tracking algorithms, benchmarking the performance with different sensors, UAVs, and algorithms. Importantly, our dataset shows that current methods have shortcomings and are unable to track UAVs consistently across different scenarios.
Comparison of DDS, MQTT, and Zenoh in Edge-to-Edge and Edge-to-Cloud Communication for Distributed ROS 2 Systems
Sep 28, 2023The increased data transmission and number of devices involved in communications among distributed systems make it challenging yet significantly necessary to have an efficient and reliable networking middleware. In robotics and autonomous systems, the wide application of ROS\,2 brings the possibility of utilizing various networking middlewares together with DDS in ROS\,2 for better communication among edge devices or between edge devices and the cloud. However, there is a lack of comprehensive communication performance comparison of integrating these networking middlewares with ROS\,2. In this study, we provide a quantitative analysis for the communication performance of utilized networking middlewares including MQTT and Zenoh alongside DDS in ROS\,2 among a multiple host system. For a complete and reliable comparison, we calculate the latency and throughput of these middlewares by sending distinct amounts and types of data through different network setups including Ethernet, Wi-Fi, and 4G. To further extend the evaluation to real-world application scenarios, we assess the drift error (the position changes) over time caused by these networking middlewares with the robot moving in an identical square-shaped path. Our results show that CycloneDDS performs better under Ethernet while Zenoh performs better under Wi-Fi and 4G. In the actual robot test, the robot moving trajectory drift error over time (96\,s) via Zenoh is the smallest. It is worth noting we have a discussion of the CPU utilization of these networking middlewares and the performance impact caused by enabling the security feature in ROS\,2 at the end of the paper.