 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust UAV Tracking in GNSS-Denied Environments: A Multi-LiDAR Multi-UAV Dataset
Paper and Code
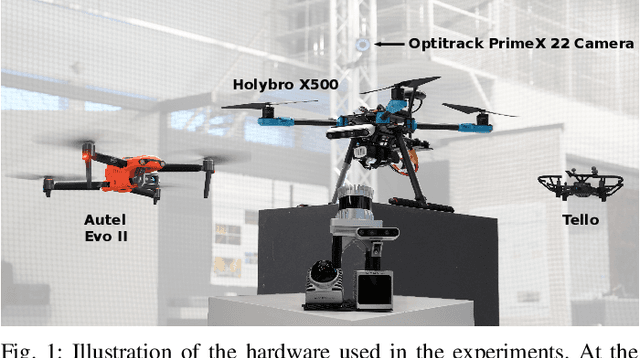
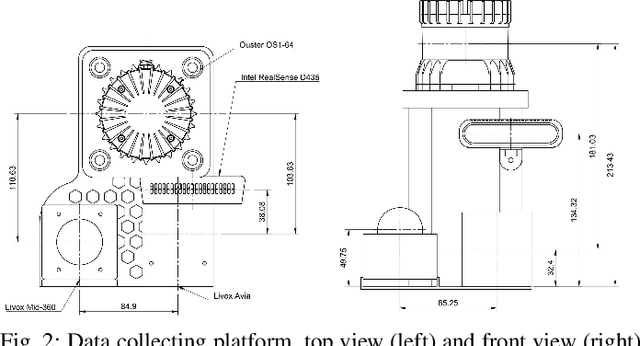
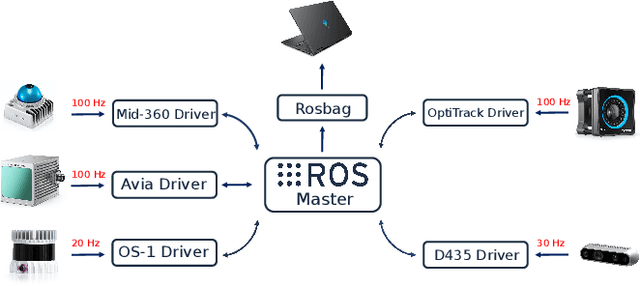
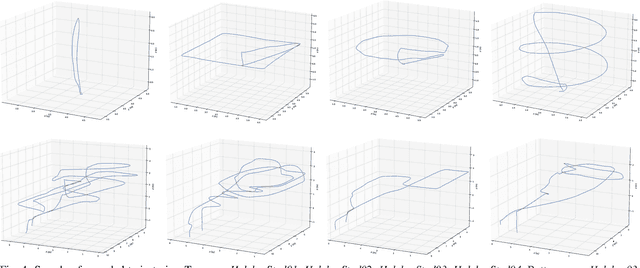
With the increasing prevalence of drones in various industries, the navigation and tracking of unmanned aerial vehicles (UAVs) in challenging environments, particularly GNSS-denied areas, have become crucial concerns. To address this need, we present a novel multi-LiDAR dataset specifically designed for UAV tracking. Our dataset includes data from a spinning LiDAR, two solid-state LiDARs with different Field of View (FoV) and scan patterns, and an RGB-D camera. This diverse sensor suite allows for research on new challenges in the field, including limited FoV adaptability and multi-modality data processing. The dataset facilitates the evaluation of existing algorithms and the development of new ones, paving the way for advances in UAV tracking techniques. Notably, we provide data in both indoor and outdoor environments. We also consider variable UAV sizes, from micro-aerial vehicles to more standard commercial UAV platforms. The outdoor trajectories are selected with close proximity to buildings, targeting research in UAV detection in urban areas, e.g., within counter-UAV systems or docking for UAV logistics. In addition to the dataset, we provide a baseline comparison with recent LiDAR-based UAV tracking algorithms, benchmarking the performance with different sensors, UAVs, and algorithms. Importantly, our dataset shows that current methods have shortcomings and are unable to track UAVs consistently across different scenarios.