 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAion: Towards Hierarchical 4D Scene Graphs with Temporal Flow Dynamics
Dec 10, 2025Autonomous navigation in dynamic environments requires spatial representations that capture both semantic structure and temporal evolution. 3D Scene Graphs (3DSGs) provide hierarchical multi-resolution abstractions that encode geometry and semantics, but existing extensions toward dynamics largely focus on individual objects or agents. In parallel, Maps of Dynamics (MoDs) model typical motion patterns and temporal regularities, yet are usually tied to grid-based discretizations that lack semantic awareness and do not scale well to large environments. In this paper we introduce Aion, a framework that embeds temporal flow dynamics directly within a hierarchical 3DSG, effectively incorporating the temporal dimension. Aion employs a graph-based sparse MoD representation to capture motion flows over arbitrary time intervals and attaches them to navigational nodes in the scene graph, yielding more interpretable and scalable predictions that improve planning and interaction in complex dynamic environments.
Follow-Me in Micro-Mobility with End-to-End Imitation Learning
Nov 07, 2025Autonomous micro-mobility platforms face challenges from the perspective of the typical deployment environment: large indoor spaces or urban areas that are potentially crowded and highly dynamic. While social navigation algorithms have progressed significantly, optimizing user comfort and overall user experience over other typical metrics in robotics (e.g., time or distance traveled) is understudied. Specifically, these metrics are critical in commercial applications. In this paper, we show how imitation learning delivers smoother and overall better controllers, versus previously used manually-tuned controllers. We demonstrate how DAAV's autonomous wheelchair achieves state-of-the-art comfort in follow-me mode, in which it follows a human operator assisting persons with reduced mobility (PRM). This paper analyzes different neural network architectures for end-to-end control and demonstrates their usability in real-world production-level deployments.
Towards Robust UAV Tracking in GNSS-Denied Environments: A Multi-LiDAR Multi-UAV Dataset
Oct 13, 2023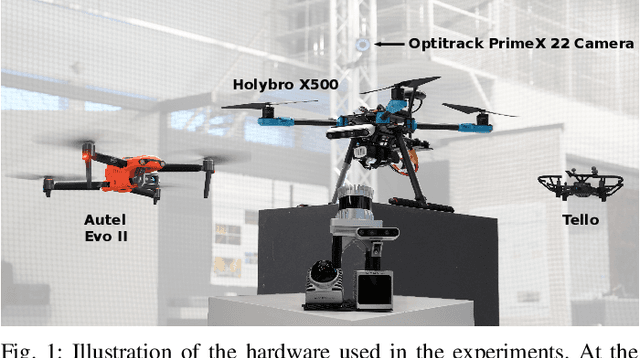
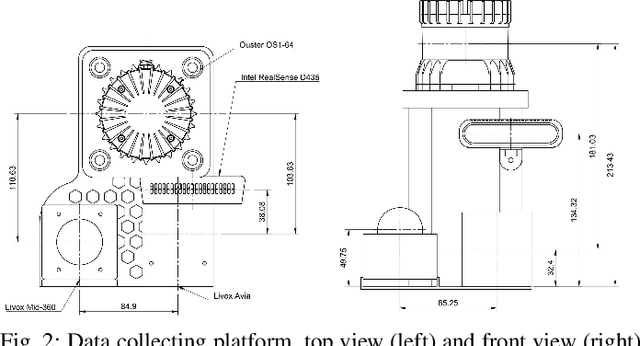
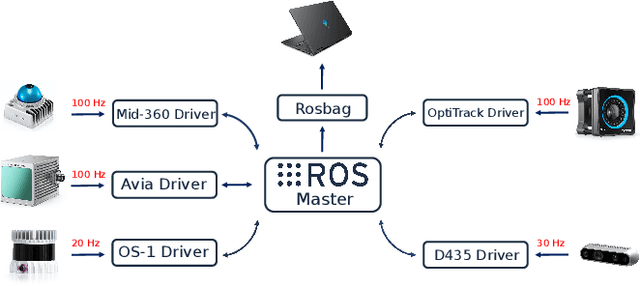
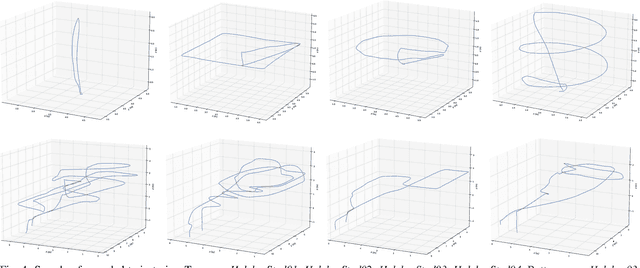
With the increasing prevalence of drones in various industries, the navigation and tracking of unmanned aerial vehicles (UAVs) in challenging environments, particularly GNSS-denied areas, have become crucial concerns. To address this need, we present a novel multi-LiDAR dataset specifically designed for UAV tracking. Our dataset includes data from a spinning LiDAR, two solid-state LiDARs with different Field of View (FoV) and scan patterns, and an RGB-D camera. This diverse sensor suite allows for research on new challenges in the field, including limited FoV adaptability and multi-modality data processing. The dataset facilitates the evaluation of existing algorithms and the development of new ones, paving the way for advances in UAV tracking techniques. Notably, we provide data in both indoor and outdoor environments. We also consider variable UAV sizes, from micro-aerial vehicles to more standard commercial UAV platforms. The outdoor trajectories are selected with close proximity to buildings, targeting research in UAV detection in urban areas, e.g., within counter-UAV systems or docking for UAV logistics. In addition to the dataset, we provide a baseline comparison with recent LiDAR-based UAV tracking algorithms, benchmarking the performance with different sensors, UAVs, and algorithms. Importantly, our dataset shows that current methods have shortcomings and are unable to track UAVs consistently across different scenarios.
UAV Tracking with Solid-State Lidars:Dynamic Multi-Frequency Scan Integration
Apr 24, 2023



With the increasing use of drones across various industries, the navigation and tracking of these unmanned aerial vehicles (UAVs) in challenging environments (such as GNSS-denied environments) have become critical issues. In this paper, we propose a novel method for a ground-based UAV tracking system using a solid-state LiDAR, which dynamically adjusts the LiDAR frame integration time based on the distance to the UAV and its speed. Our method fuses two simultaneous scan integration frequencies for high accuracy and persistent tracking, enabling reliable estimates of the UAV state even in challenging scenarios. The use of the Inverse Covariance Intersection method and Kalman filters allow for better tracking accuracy and can handle challenging tracking scenarios. We have performed a number of experiments for evaluating the performance of the proposed tracking system and identifying its limitations. Our experimental results demonstrate that the proposed method achieves comparable tracking performance to the established baseline method, while also providing more reliable and accurate tracking when only one of the frequencies is available or unreliable.
Evaluating the Performance of Multi-Scan Integration for UAV LiDAR-based Tracking
Apr 03, 2023



Drones have become essential tools in a wide range of industries, including agriculture, surveying, and transportation. However, tracking unmanned aerial vehicles (UAVs) in challenging environments, such cluttered or GNSS-denied environments, remains a critical issue. Additionally, UAVs are being deployed as part of multi-robot systems, where tracking their position can be essential for relative state estimation. In this paper, we evaluate the performance of a multi-scan integration method for tracking UAVs in GNSS-denied environments using a solid-state LiDAR and a Kalman Filter (KF). We evaluate the algorithm's ability to track a UAV in a large open area at various distances and speeds. Our quantitative analysis shows that while "tracking by detection" using a constant velocity model is the only method that consistently tracks the target, integrating multiple scan frequencies using a KF achieves lower position errors and represents a viable option for tracking UAVs in similar scenarios.
UAV Tracking with Lidar as a Camera Sensors in GNSS-Denied Environments
Mar 01, 2023LiDAR has become one of the primary sensors in robotics and autonomous system for high-accuracy situational awareness. In recent years, multi-modal LiDAR systems emerged, and among them, LiDAR-as-a-camera sensors provide not only 3D point clouds but also fixed-resolution 360{\deg}panoramic images by encoding either depth, reflectivity, or near-infrared light in the image pixels. This potentially brings computer vision capabilities on top of the potential of LiDAR itself. In this paper, we are specifically interested in utilizing LiDARs and LiDAR-generated images for tracking Unmanned Aerial Vehicles (UAVs) in real-time which can benefit applications including docking, remote identification, or counter-UAV systems, among others. This is, to the best of our knowledge, the first work that explores the possibility of fusing the images and point cloud generated by a single LiDAR sensor to track a UAV without a priori known initialized position. We trained a custom YOLOv5 model for detecting UAVs based on the panoramic images collected in an indoor experiment arena with a MOCAP system. By integrating with the point cloud, we are able to continuously provide the position of the UAV. Our experiment demonstrated the effectiveness of the proposed UAV tracking approach compared with methods based only on point clouds or images. Additionally, we evaluated the real-time performance of our approach on the Nvidia Jetson Nano, a popular mobile computing platform.