 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking UWB-Based Infrastructure-Free Positioning and Multi-Robot Relative Localization: Dataset and Characterization
May 15, 2023



Ultra-wideband (UWB) positioning has emerged as a low-cost and dependable localization solution for multiple use cases, from mobile robots to asset tracking within the Industrial IoT. The technology is mature and the scientific literature contains multiple datasets and methods for localization based on fixed UWB nodes. At the same time, research in UWB-based relative localization and infrastructure-free localization is gaining traction, further domains. tools and datasets in this domain are scarce. Therefore, we introduce in this paper a novel dataset for benchmarking infrastructure-free relative localization targeting the domain of multi-robot systems. Compared to previous datasets, we analyze the performance of different relative localization approaches for a much wider variety of scenarios with varying numbers of fixed and mobile nodes. A motion capture system provides ground truth data, are multi-modal and include inertial or odometry measurements for benchmarking sensor fusion methods. Additionally, the dataset contains measurements of ranging accuracy based on the relative orientation of antennas and a comprehensive set of measurements for ranging between a single pair of nodes. Our experimental analysis shows that high accuracy can be localization, but the variability of the ranging error is significant across different settings and setups.
Is Alice Really in Wonderland? UWB-Based Proof of Location for UAVs with Hyperledger Fabric Blockchain
Apr 03, 2023



Remote identification of Unmanned Aerial Vehicles (UAVs) is becoming increasingly important since more UAVs are being widely used for different needs in urban areas. For example, in the US and in the EU, identification and position broadcasting is already a requirement for the use of drones. However, the current solutions do not validate the position of the UAV but its identity, while trusting the given position. Therefore, a more advanced solution enabling the proof of location is needed to avoid spoofing. We propose the combination of a permissioned blockchain managed by public authorities together with UWB-based communication to approach this. Specifically, we leverage the identity management tools from Hyperledger Fabric, an open-source permissioned blockchain framework, and ultra-wideband (UWB) ranging, leading to situated communication (i.e., simultaneous communication and localization). This approach allows us to prove both the UAV identity and also the location it broadcasts through interaction with ground infrastructure in known locations. Our initial experiments show that the proposed approach is viable and UWB transceivers can be used for UAVs to validate both their identity and position with ground infrastructure deployed in known locations.
Exploiting Redundancy for UWB Anomaly Detection in Infrastructure-Free Multi-Robot Relative Localization
Mar 30, 2023Ultra-wideband (UWB) localization methods have emerged as a cost-effective and accurate solution for GNSS-denied environments. There is a significant amount of previous research in terms of resilience of UWB ranging, with non-line-of-sight and multipath detection methods. However, little attention has been paid to resilience against disturbances in relative localization systems involving multiple nodes. This paper presents an approach to detecting range anomalies in UWB ranging measurements from the perspective of multi-robot cooperative localization. We introduce an approach to exploiting redundancy for relative localization in multi-robot systems, where the position of each node is calculated using different subsets of available data. This enables us to effectively identify nodes that present ranging anomalies and eliminate their effect within the cooperative localization scheme. We analyze anomalies created by timing errors in the ranging process, e.g., owing to malfunctioning hardware. However, our method is generic and can be extended to other types of ranging anomalies. Our approach results in a more resilient cooperative localization framework with a negligible impact in terms of the computational workload.
UWB Role Allocation with Distributed Ledger Technologies for Scalable Relative Localization in Multi-Robot Systems
Aug 29, 2022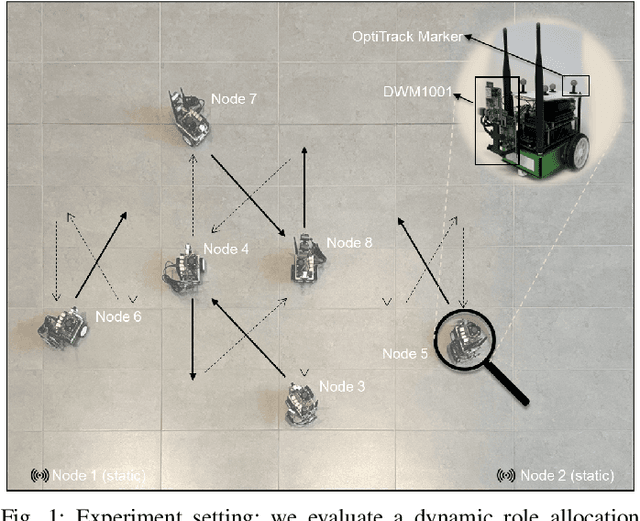
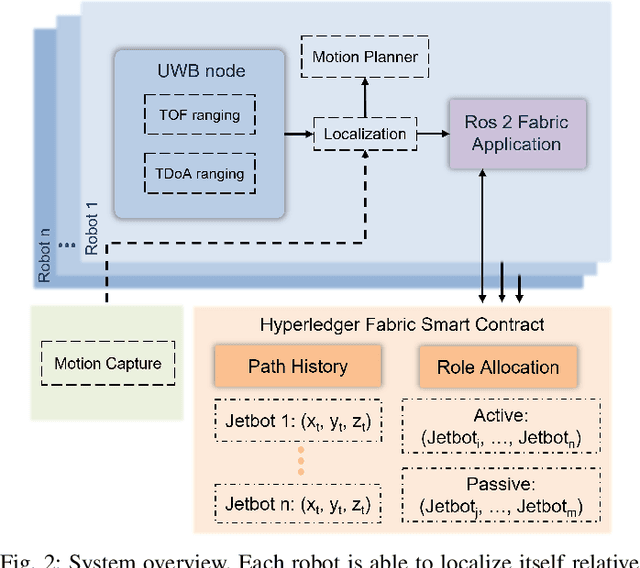
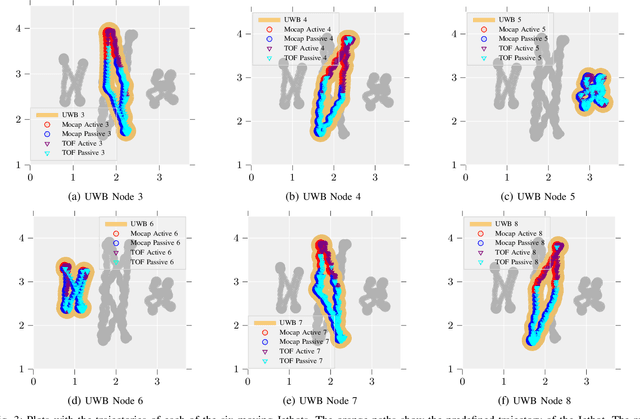
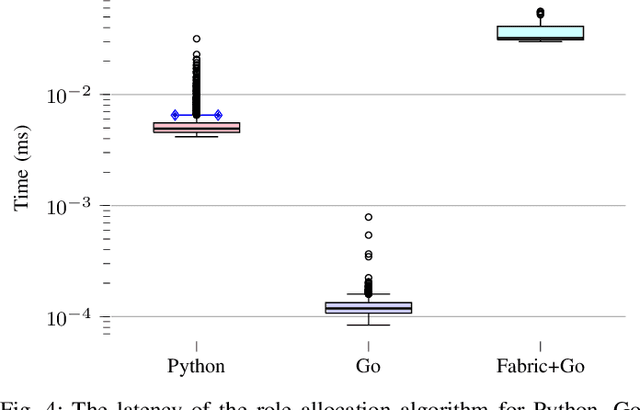
Systems for relative localization in multi-robot systems based on ultra-wideband (UWB) ranging have recently emerged as robust solutions for GNSS-denied environments. Scalability remains one of the key challenges, particularly in ad-hoc deployments. Recent solutions include dynamic allocation of active and passive localization modes for different robots or nodes in the system. With larger-scale systems becoming more distributed, key research questions arise in the areas of security and trustability of such localization systems. This paper studies the potential integration of collaborative-decision making processes with distributed ledger technologies. Specifically, we investigate the design and implementation of a methodology for running an UWB role allocation algorithm within smart contracts in a blockchain. In previous works, we have separately studied the integration of ROS2 with the Hyperledger Fabric blockchain, and introduced a new algorithm for scalable UWB-based localization. In this paper, we extend these works by (i) running experiments with larger number of mobile robots switching between different spatial configurations and (ii) integrating the dynamic UWB role allocation algorithm into Fabric smart contracts for distributed decision-making in a system of multiple mobile robots. This enables us to deliver the same functionality within a secure and trustable process, with enhanced identity and data access management. Our results show the effectiveness of the UWB role allocation for continuously varying spatial formations of six autonomous mobile robots, while demonstrating a low impact on latency and computational resources of adding the blockchain layer that does not affect the localization process.
Secure Heterogeneous Multi-Robot Collaboration and Docking with Hyperledger Fabric Blockchain
Jun 30, 2022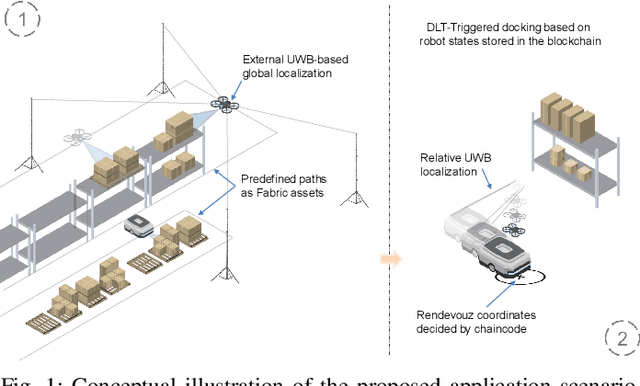
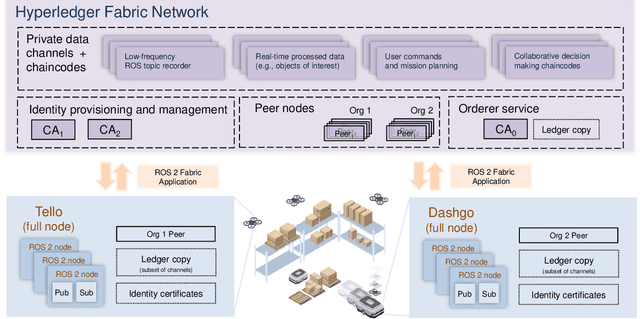
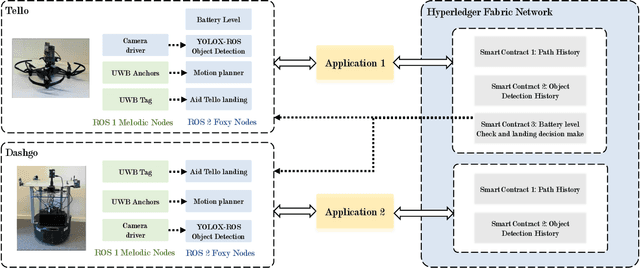
In recent years, multi-robot systems have received increasing attention from both industry and academia. Besides the need of accurate and robust estimation of relative localization, security and trust in the system are essential to enable wider adoption. In this paper, we propose a framework using Hyperledger Fabric for multi-robot collaboration in industrial applications. We rely on blockchain identities for the interaction of ground and aerial robots, and use smart contracts for collaborative decision making. The use of ultra-wideband (UWB) localization for both autonomous navigation and robot collaboration extends our previous work in Fabric-based fleet management. We focus on an inventory management application which uses a ground robot and an aerial robot to inspect a warehouse-like environment and store information about the found objects in the blockchain. We measure the impact of adding the blockchain layer, analyze the transaction commit latency and compare the resource utilization of blockchain-related processes to the already running data processing modules.
Towards Large-Scale Relative Localization in Multi-Robot Systems with Dynamic UWB Role Allocation
Mar 08, 2022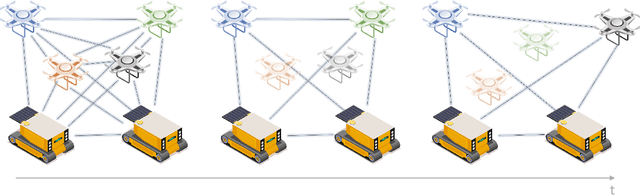
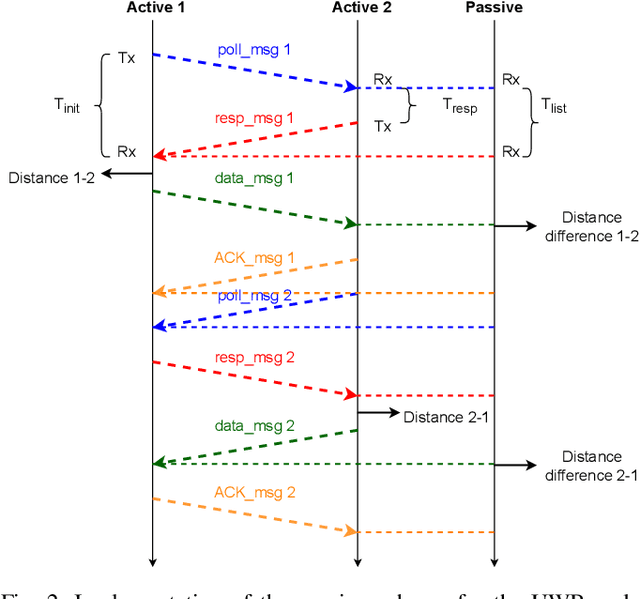
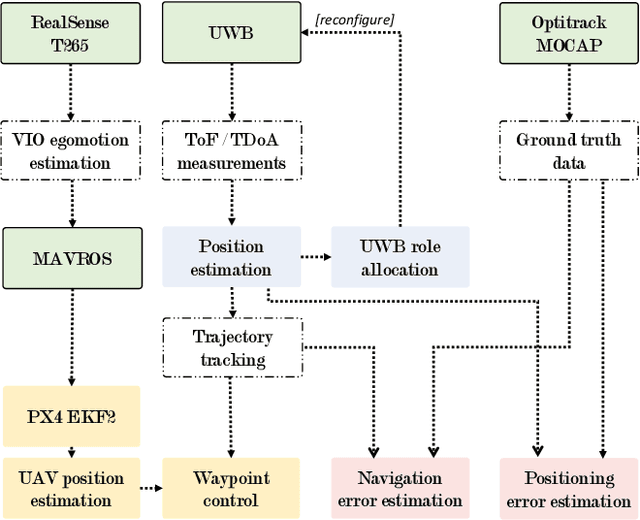
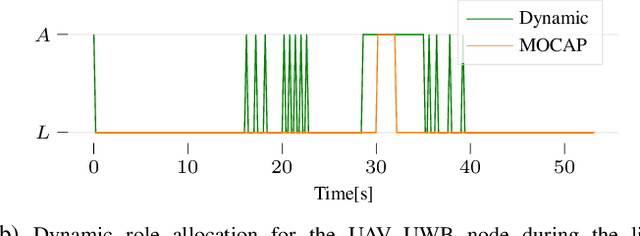
Ultra-wideband (UWB) ranging has emerged as a key radio technology for robot positioning and relative localization in multi-robot systems. Multiple works are now advancing towards more scalable systems, but challenges still remain. This paper proposes a novel approach to relative localization in multi-robot systems where the roles of the UWB nodes are dynamically allocated between active nodes (using time-of-flight for ranging estimation to other active nodes) and passive nodes (using time-difference-of-arrival for estimating range differences with respect to pairs of active nodes). We adaptively update UWB roles based on the location of the robots with respect to the convex envelope defined by active nodes, and introducing constraints in the form of localization frequency and accuracy requirements. We demonstrate the applicability of the proposed approach and show that the localization errors remain comparable to fixed-role systems. Then, we show how the navigation of an autonomous drone is affected by the changes in the localization system, obtaining significantly better trajectory tracking accuracy than when relying in passive localization only. Our results pave the way for UWB-based localization in large-scale multi-robot deployments, for either relative positioning or for applications in GNSS-denied environments.