 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Scaling for Navigation in Unknown Environments
Jan 14, 2026Generalization of imitation-learned navigation policies to environments unseen in training remains a major challenge. We address this by conducting the first large-scale study of how data quantity and data diversity affect real-world generalization in end-to-end, map-free visual navigation. Using a curated 4,565-hour crowd-sourced dataset collected across 161 locations in 35 countries, we train policies for point goal navigation and evaluate their closed-loop control performance on sidewalk robots operating in four countries, covering 125 km of autonomous driving. Our results show that large-scale training data enables zero-shot navigation in unknown environments, approaching the performance of policies trained with environment-specific demonstrations. Critically, we find that data diversity is far more important than data quantity. Doubling the number of geographical locations in a training set decreases navigation errors by ~15%, while performance benefit from adding data from existing locations saturates with very little data. We also observe that, with noisy crowd-sourced data, simple regression-based models outperform generative and sequence-based architectures. We release our policies, evaluation setup and example videos on the project page.
ROSBag MCP Server: Analyzing Robot Data with LLMs for Agentic Embodied AI Applications
Nov 05, 2025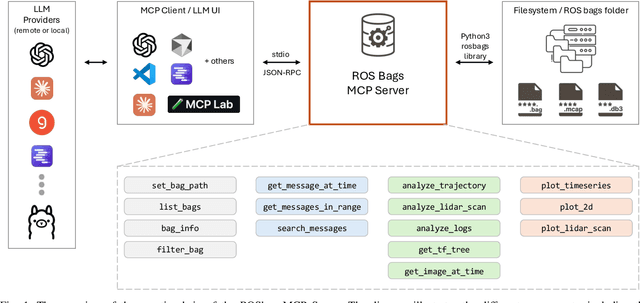
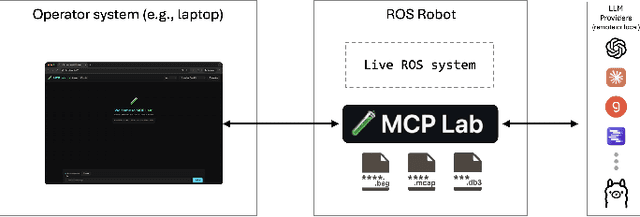
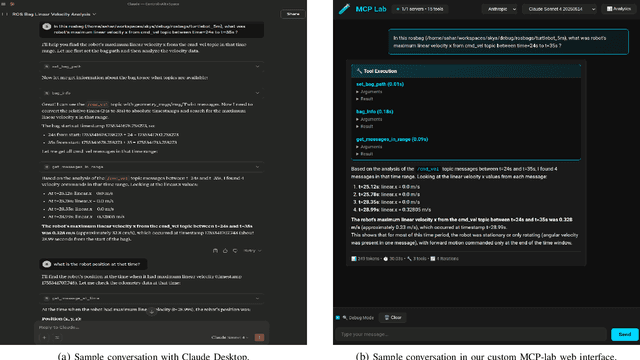
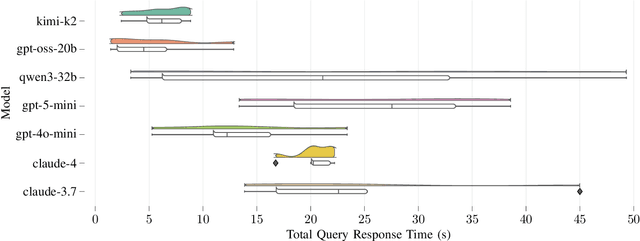
Agentic AI systems and Physical or Embodied AI systems have been two key research verticals at the forefront of Artificial Intelligence and Robotics, with Model Context Protocol (MCP) increasingly becoming a key component and enabler of agentic applications. However, the literature at the intersection of these verticals, i.e., Agentic Embodied AI, remains scarce. This paper introduces an MCP server for analyzing ROS and ROS 2 bags, allowing for analyzing, visualizing and processing robot data with natural language through LLMs and VLMs. We describe specific tooling built with robotics domain knowledge, with our initial release focused on mobile robotics and supporting natively the analysis of trajectories, laser scan data, transforms, or time series data. This is in addition to providing an interface to standard ROS 2 CLI tools ("ros2 bag list" or "ros2 bag info"), as well as the ability to filter bags with a subset of topics or trimmed in time. Coupled with the MCP server, we provide a lightweight UI that allows the benchmarking of the tooling with different LLMs, both proprietary (Anthropic, OpenAI) and open-source (through Groq). Our experimental results include the analysis of tool calling capabilities of eight different state-of-the-art LLM/VLM models, both proprietary and open-source, large and small. Our experiments indicate that there is a large divide in tool calling capabilities, with Kimi K2 and Claude Sonnet 4 demonstrating clearly superior performance. We also conclude that there are multiple factors affecting the success rates, from the tool description schema to the number of arguments, as well as the number of tools available to the models. The code is available with a permissive license at https://github.com/binabik-ai/mcp-rosbags.
Towards Embodied Agentic AI: Review and Classification of LLM- and VLM-Driven Robot Autonomy and Interaction
Aug 07, 2025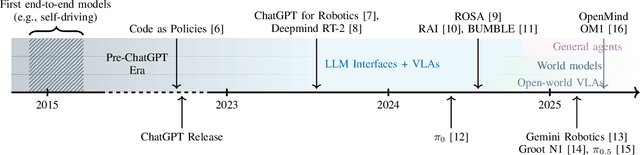
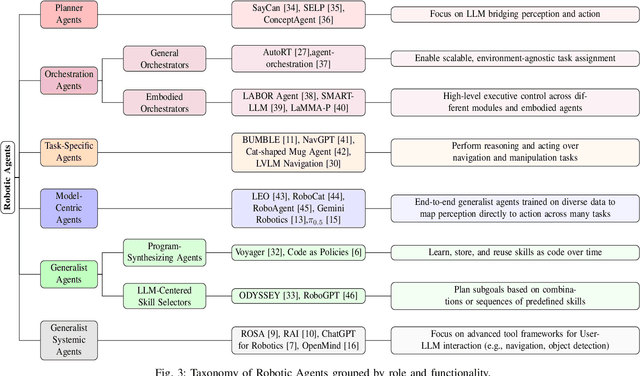
Foundation models, including large language models (LLMs) and vision-language models (VLMs), have recently enabled novel approaches to robot autonomy and human-robot interfaces. In parallel, vision-language-action models (VLAs) or large behavior models (BLMs) are increasing the dexterity and capabilities of robotic systems. This survey paper focuses on those words advancing towards agentic applications and architectures. This includes initial efforts exploring GPT-style interfaces to tooling, as well as more complex system where AI agents are coordinators, planners, perception actors, or generalist interfaces. Such agentic architectures allow robots to reason over natural language instructions, invoke APIs, plan task sequences, or assist in operations and diagnostics. In addition to peer-reviewed research, due to the fast-evolving nature of the field, we highlight and include community-driven projects, ROS packages, and industrial frameworks that show emerging trends. We propose a taxonomy for classifying model integration approaches and present a comparative analysis of the role that agents play in different solutions in today's literature.
PlaceNav: Topological Navigation through Place Recognition
Oct 05, 2023



Recent results suggest that splitting topological navigation into robot-independent and robot-specific components improves navigation performance by enabling the robot-independent part to be trained with data collected by different robot types. However, the navigation methods are still limited by the scarcity of suitable training data and suffer from poor computational scaling. In this work, we present PlaceNav, subdividing the robot-independent part into navigation-specific and generic computer vision components. We utilize visual place recognition for the subgoal selection of the topological navigation pipeline. This makes subgoal selection more efficient and enables leveraging large-scale datasets from non-robotics sources, increasing training data availability. Bayesian filtering, enabled by place recognition, further improves navigation performance by increasing the temporal consistency of subgoals. Our experimental results verify the design and the new model obtains a 76% higher success rate in indoor and 23% higher in outdoor navigation tasks with higher computational efficiency.
Is Alice Really in Wonderland? UWB-Based Proof of Location for UAVs with Hyperledger Fabric Blockchain
Apr 03, 2023



Remote identification of Unmanned Aerial Vehicles (UAVs) is becoming increasingly important since more UAVs are being widely used for different needs in urban areas. For example, in the US and in the EU, identification and position broadcasting is already a requirement for the use of drones. However, the current solutions do not validate the position of the UAV but its identity, while trusting the given position. Therefore, a more advanced solution enabling the proof of location is needed to avoid spoofing. We propose the combination of a permissioned blockchain managed by public authorities together with UWB-based communication to approach this. Specifically, we leverage the identity management tools from Hyperledger Fabric, an open-source permissioned blockchain framework, and ultra-wideband (UWB) ranging, leading to situated communication (i.e., simultaneous communication and localization). This approach allows us to prove both the UAV identity and also the location it broadcasts through interaction with ground infrastructure in known locations. Our initial experiments show that the proposed approach is viable and UWB transceivers can be used for UAVs to validate both their identity and position with ground infrastructure deployed in known locations.
A Simulation Benchmark for Vision-based Autonomous Navigation
Apr 01, 2022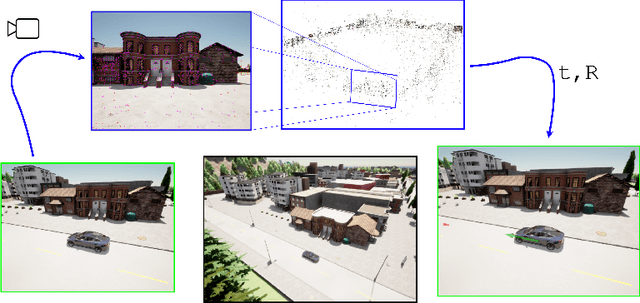

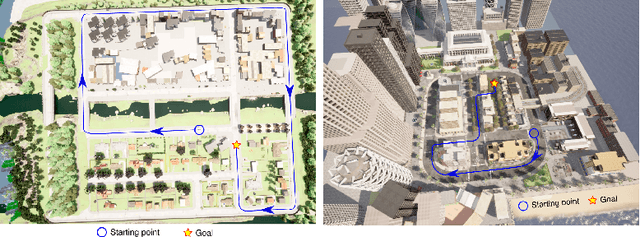
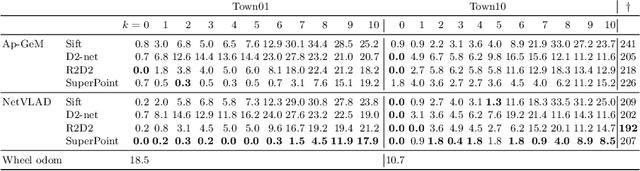
This work introduces a simulator benchmark for vision-based autonomous navigation. The simulator offers control over real world variables such as the environment, time of day, weather and traffic. The benchmark includes a modular integration of different components of a full autonomous visual navigation stack. In the experimental part of the paper, state-of-the-art visual localization methods are evaluated as a part of the stack in realistic navigation tasks. To the authors' best knowledge, the proposed benchmark is the first to study modern visual localization methods as part of a full autonomous visual navigation stack.