 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Intent-Based Multi-Robot Task Planner with LLM Oracles on Hyperledger Fabric
Feb 09, 2026Large language models (LLMs) have opened new opportunities for transforming natural language user intents into executable actions. This capability enables embodied AI agents to perform complex tasks, without involvement of an expert, making human-robot interaction (HRI) more convenient. However these developments raise significant security and privacy challenges such as self-preferencing, where a single LLM service provider dominates the market and uses this power to promote their own preferences. LLM oracles have been recently proposed as a mechanism to decentralize LLMs by executing multiple LLMs from different vendors and aggregating their outputs to obtain a more reliable and trustworthy final result. However, the accuracy of these approaches highly depends on the aggregation method. The current aggregation methods mostly use semantic similarity between various LLM outputs, not suitable for robotic task planning, where the temporal order of tasks is important. To fill the gap, we propose an LLM oracle with a new aggregation method for robotic task planning. In addition, we propose a decentralized multi-robot infrastructure based on Hyperledger Fabric that can host the proposed oracle. The proposed infrastructure enables users to express their natural language intent to the system, which then can be decomposed into subtasks. These subtasks require coordinating different robots from different vendors, while enforcing fine-grained access control management on the data. To evaluate our methodology, we created the SkillChain-RTD benchmark made it publicly available. Our experimental results demonstrate the feasibility of the proposed architecture, and the proposed aggregation method outperforms other aggregation methods currently in use.
Benchmarking ML Approaches to UWB-Based Range-Only Posture Recognition for Human Robot-Interaction
Aug 28, 2024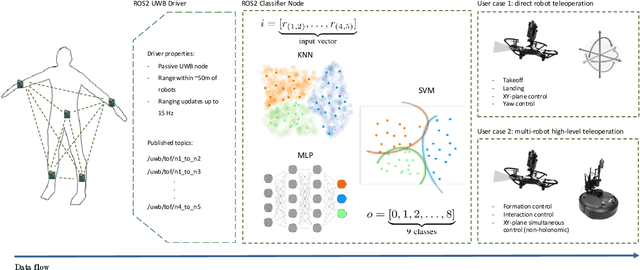
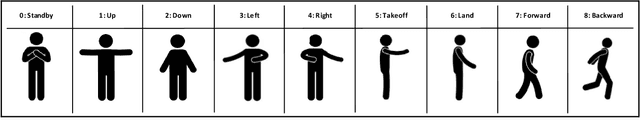
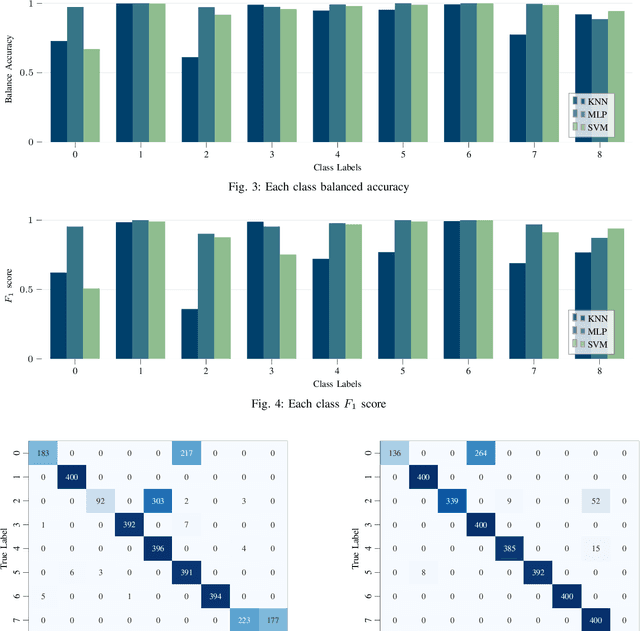
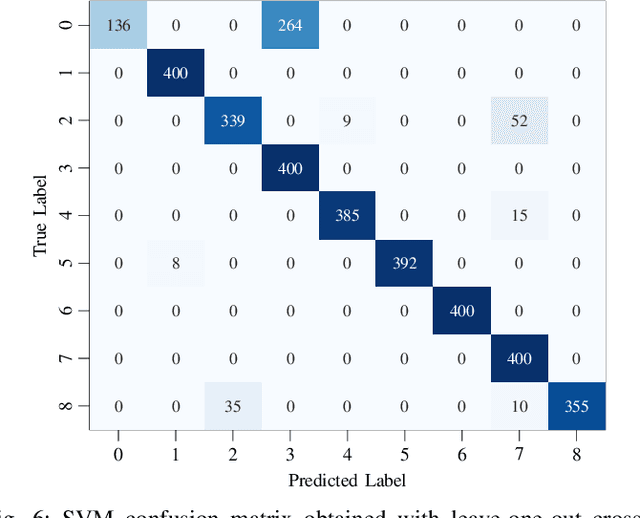
Human pose estimation involves detecting and tracking the positions of various body parts using input data from sources such as images, videos, or motion and inertial sensors. This paper presents a novel approach to human pose estimation using machine learning algorithms to predict human posture and translate them into robot motion commands using ultra-wideband (UWB) nodes, as an alternative to motion sensors. The study utilizes five UWB sensors implemented on the human body to enable the classification of still poses and more robust posture recognition. This approach ensures effective posture recognition across a variety of subjects. These range measurements serve as input features for posture prediction models, which are implemented and compared for accuracy. For this purpose, machine learning algorithms including K-Nearest Neighbors (KNN), Support Vector Machine (SVM), and deep Multi-Layer Perceptron (MLP) neural network are employed and compared in predicting corresponding postures. We demonstrate the proposed approach for real-time control of different mobile/aerial robots with inference implemented in a ROS 2 node. Experimental results demonstrate the efficacy of the approach, showcasing successful prediction of human posture and corresponding robot movements with high accuracy.
A Customizable Conflict Resolution and Attribute-Based Access Control Framework for Multi-Robot Systems
Aug 31, 2023



As multi-robot systems continue to advance and become integral to various applications, managing conflicts and ensuring secure access control are critical challenges that need to be addressed. Access control is essential in multi-robot systems to ensure secure and authorized interactions among robots, protect sensitive data, and prevent unauthorized access to resources. This paper presents a novel framework for customizable conflict resolution and attribute-based access control in multi-robot systems for ROS 2 leveraging the Hyperledger Fabric blockchain. We introduce an attribute-based access control (ABAC) Fabric-ROS 2 bridge to enable secure communication and control between users and robots. By defining conflict resolution policies based on task priorities, robot capabilities, and user-defined constraints, our framework offers a flexible way to resolve conflicts. Additionally, it incorporates attribute-based access control, granting access rights based on user and robot attributes. ABAC offers a modular approach to control access compared to existing access control approaches in ROS 2, such as SROS2. Through this framework, multi-robot systems can be managed efficiently, securely, and adaptably, ensuring controlled access to resources and managing conflicts. Our experimental evaluation shows that our framework marginally improves latency and throughput over exiting Fabric and ROS 2 integration solutions. At higher network load, it is the only solution to operate reliably without a diverging transaction commitment latency. We also demonstrate how conflicts arising from simultaneous control or a robot by two users are resolved in real-time and motion distortion is effectively eliminated.
Event-driven Fabric Blockchain - ROS 2 Interface: Towards Secure and Auditable Teleoperation of Mobile Robots
Apr 03, 2023



The integration of blockchain technology in robotic systems has been met by the community with a combination of hype and skepticism. The current literature shows that there is indeed potential for more secure and trustable distributed robotic systems. However, it is still unclear in what aspects of robotics beyond high-level decision making can blockchain technology be indeed usable. This paper explores the limits of a permissioned blockchain framework, Hyperledger Fabric, for teleoperation. Remote operation of mobile robots can benefit from the auditability and security properties of a blockchain. We study the potential benefits and the main limitations of such an approach. We introduce a new design and implementation for a event-driven Fabric-ROS 2 bridge that is able to maintain lower latencies at higher network loads than previous solutions. We also show this opens the door to more realistic use cases and applications. Our experiments with small aerial robots show latencies in the hundreds of milliseconds and simultaneous control of both a single and multi-robot system. We analyze the main trade-offs and limitations for real-world near real-time remote teleoperation.
UWB Role Allocation with Distributed Ledger Technologies for Scalable Relative Localization in Multi-Robot Systems
Aug 29, 2022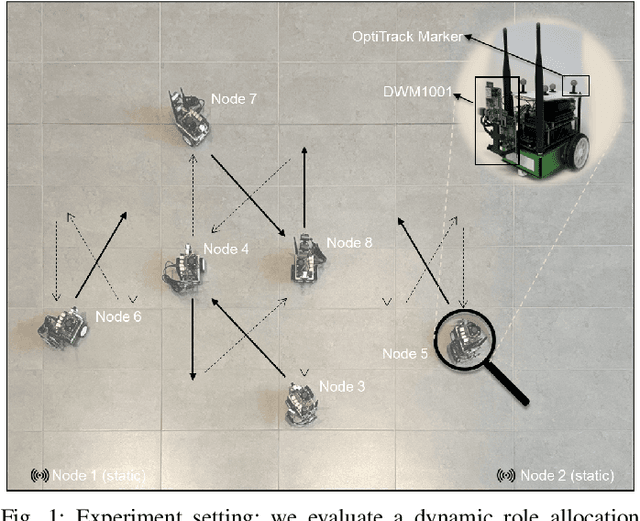
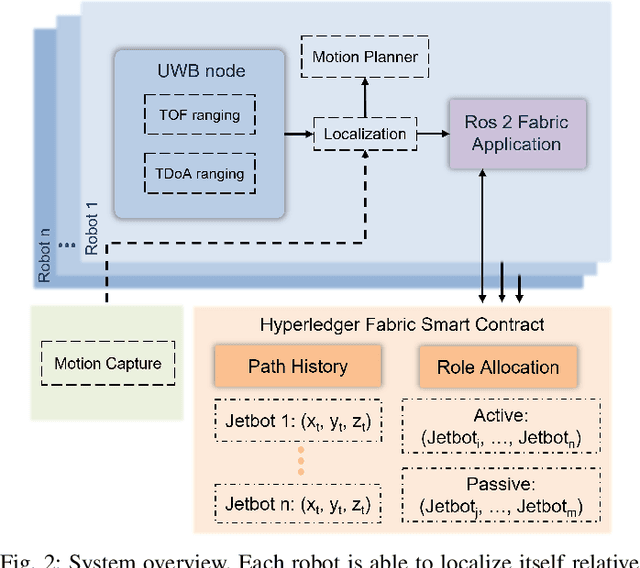
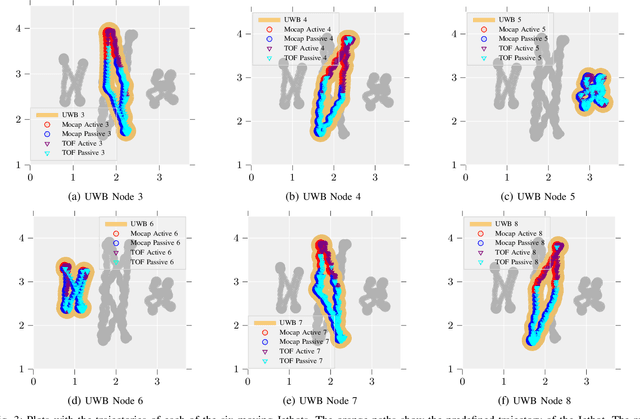
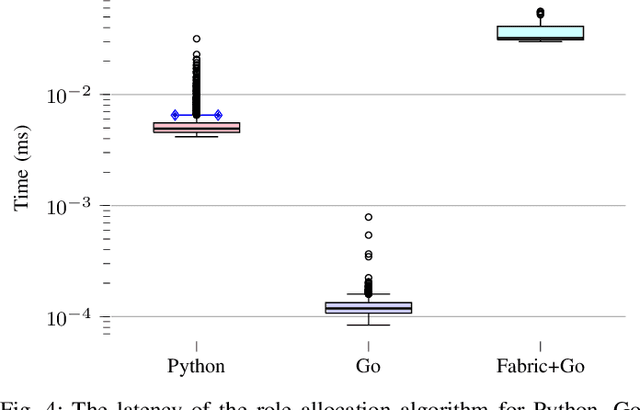
Systems for relative localization in multi-robot systems based on ultra-wideband (UWB) ranging have recently emerged as robust solutions for GNSS-denied environments. Scalability remains one of the key challenges, particularly in ad-hoc deployments. Recent solutions include dynamic allocation of active and passive localization modes for different robots or nodes in the system. With larger-scale systems becoming more distributed, key research questions arise in the areas of security and trustability of such localization systems. This paper studies the potential integration of collaborative-decision making processes with distributed ledger technologies. Specifically, we investigate the design and implementation of a methodology for running an UWB role allocation algorithm within smart contracts in a blockchain. In previous works, we have separately studied the integration of ROS2 with the Hyperledger Fabric blockchain, and introduced a new algorithm for scalable UWB-based localization. In this paper, we extend these works by (i) running experiments with larger number of mobile robots switching between different spatial configurations and (ii) integrating the dynamic UWB role allocation algorithm into Fabric smart contracts for distributed decision-making in a system of multiple mobile robots. This enables us to deliver the same functionality within a secure and trustable process, with enhanced identity and data access management. Our results show the effectiveness of the UWB role allocation for continuously varying spatial formations of six autonomous mobile robots, while demonstrating a low impact on latency and computational resources of adding the blockchain layer that does not affect the localization process.
Secure Heterogeneous Multi-Robot Collaboration and Docking with Hyperledger Fabric Blockchain
Jun 30, 2022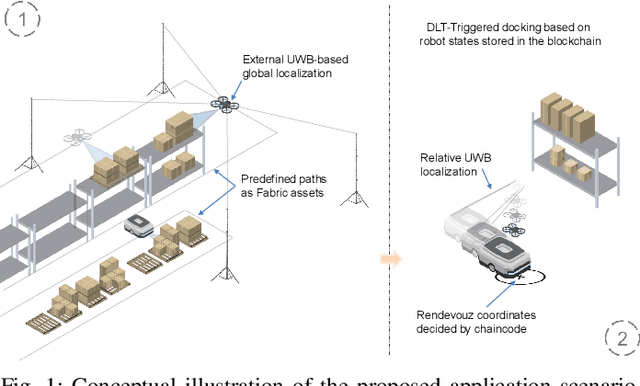
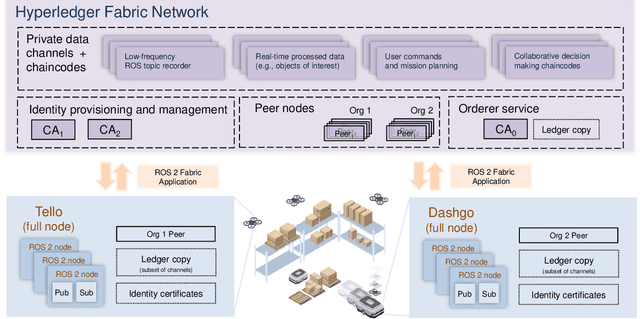
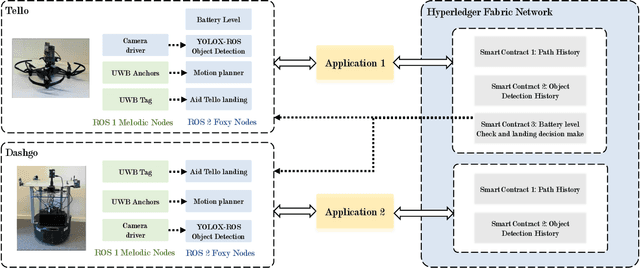
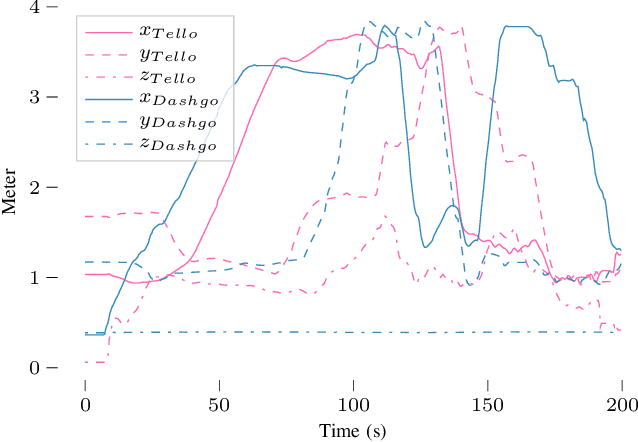
In recent years, multi-robot systems have received increasing attention from both industry and academia. Besides the need of accurate and robust estimation of relative localization, security and trust in the system are essential to enable wider adoption. In this paper, we propose a framework using Hyperledger Fabric for multi-robot collaboration in industrial applications. We rely on blockchain identities for the interaction of ground and aerial robots, and use smart contracts for collaborative decision making. The use of ultra-wideband (UWB) localization for both autonomous navigation and robot collaboration extends our previous work in Fabric-based fleet management. We focus on an inventory management application which uses a ground robot and an aerial robot to inspect a warehouse-like environment and store information about the found objects in the blockchain. We measure the impact of adding the blockchain layer, analyze the transaction commit latency and compare the resource utilization of blockchain-related processes to the already running data processing modules.
Towards Managing Industrial Robot Fleets with Hyperledger Fabric Blockchain and ROS 2
Mar 08, 2022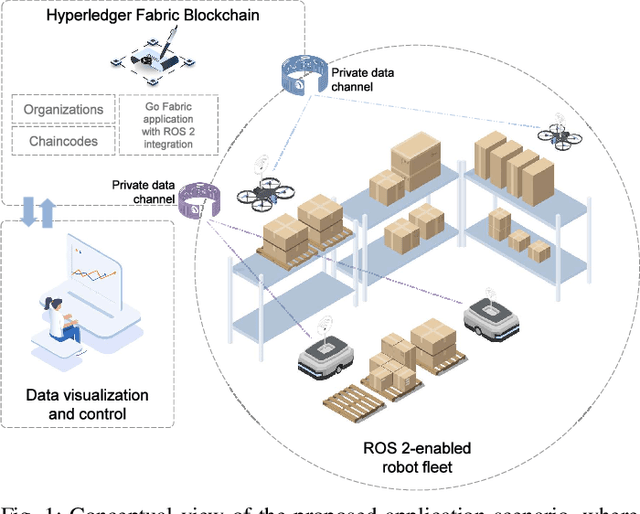
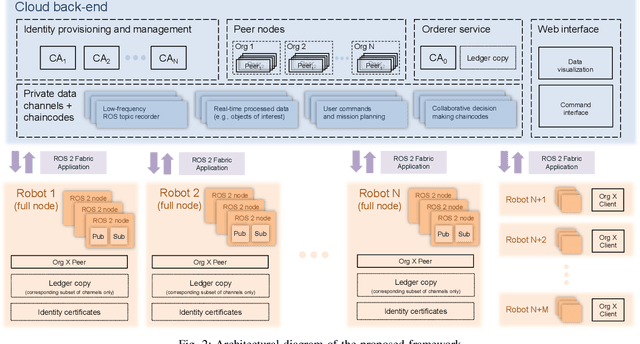
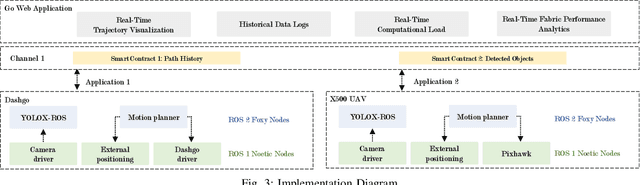
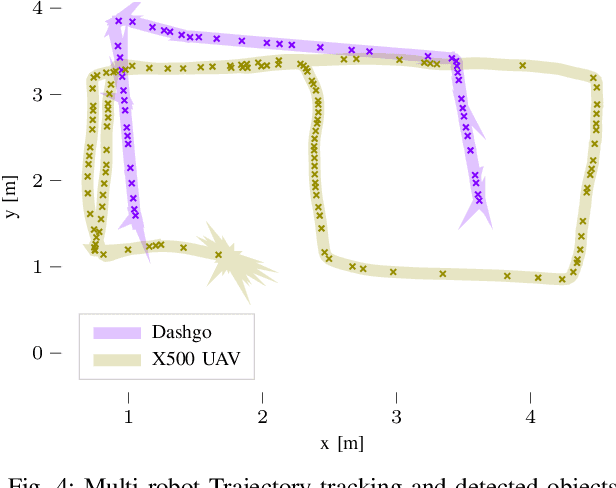
Trust is increasingly becoming a key consideration in the design of autonomous robotic systems. In industrial applications, security and trust in the system are requirements for widespread adoption. Blockchain technologies have emerged as a potential solution to address identity management and secure data aggregation and control. However, the vast majority of works to date utilize Ethereum and smart contracts that are not scalable or well suited for industrial applications. This paper presents what is, to the best of our knowledge, the first integration of ROS 2 with the Hyperledger Fabric blockchain. With a framework that leverages Fabric smart contracts and ROS 2 through a Go application, we delve into the potential of using blockchain for controlling robots, and gathering and processing their data. We demonstrate the applicability of the proposed framework to an inventory management use-case where different robots are used to detect objects of interest in a given area. Designed to meet the requirements of distributed robotic systems, we show that the performance of the robots is not impacted significantly by the blockchain layer. At the same time, we provide examples for developing other applications that integrate Fabric smart contracts with ROS 2. Our results pave the way for further adoption of blockchain technologies in autonomous robotic systems for building trustable data sharing.