 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy-Grounded Room Segmentation for Hierarchical 3D Scene Graphs
Jun 11, 2026Hierarchical 3D scene graphs (3DSGs) for indoor robots organize geometric and semantic information across spatial scales, with a room layer that connects object-level perception to room-scale reasoning. Existing systems construct this layer from different spatial substrates (\eg{} place clusters, wall planes, or segmentation outputs), and as a result, room nodes are not evaluated on a common geometric criterion. We present an occupancy-grounded 3DSG pipeline in which room nodes are anchored to tracked free-space regions derived from occupancy decomposition, giving each room an explicit polygonal footprint. We evaluate the pipeline on 12 Matterport3D scenes by matching predicted room polygons to annotated room instances and compare against Hydra, a representative state-of-the-art place-connectivity baseline. The results show that occupancy-grounded anchoring recovers substantially more room instances than place-connectivity construction, at the cost of lower precision, and that wall-accurate room boundaries remain an open problem for both methods. Code is available at https://github.com/crcz25/OccuSG.
Intelligent Control of Differential Drive Robots Subject to Unmodeled Dynamics with EKF-based State Estimation
Mar 16, 2026Reliable control and state estimation of differential drive robots (DDR) operating in dynamic and uncertain environments remains a challenge, particularly when system dynamics are partially unknown and sensor measurements are prone to degradation. This work introduces a unified control and state estimation framework that combines a Lyapunov-based nonlinear controller and Adaptive Neural Networks (ANN) with Extended Kalman Filter (EKF)-based multi-sensor fusion. The proposed controller leverages the universal approximation property of neural networks to model unknown nonlinearities in real time. An online adaptation scheme updates the weights of the radial basis function (RBF), the architecture chosen for the ANN. The learned dynamics are integrated into a feedback linearization (FBL) control law, for which theoretical guarantees of closed-loop stability and asymptotic convergence in a trajectory-tracking task are established through a Lyapunov-like stability analysis. To ensure robust state estimation, the EKF fuses inertial measurement unit (IMU) and odometry from monocular, 2D-LiDAR and wheel encoders. The fused state estimate drives the intelligent controller, ensuring consistent performance even under drift, wheel slip, sensor noise and failure. Gazebo simulations and real-world experiments are done using DDR, demonstrating the effectiveness of the approach in terms of improved velocity tracking performance with reduction in linear and angular velocity errors up to $53.91\%$ and $29.0\%$ in comparison to the baseline FBL.
Benchmarking ML Approaches to UWB-Based Range-Only Posture Recognition for Human Robot-Interaction
Aug 28, 2024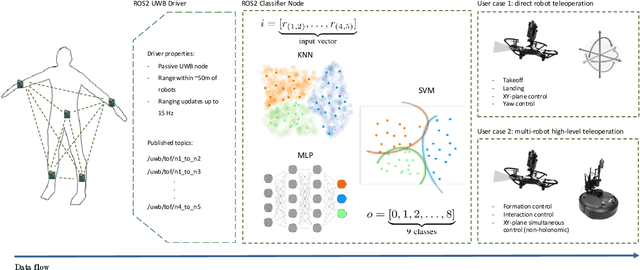
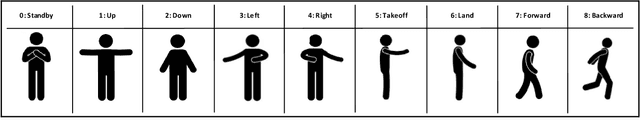
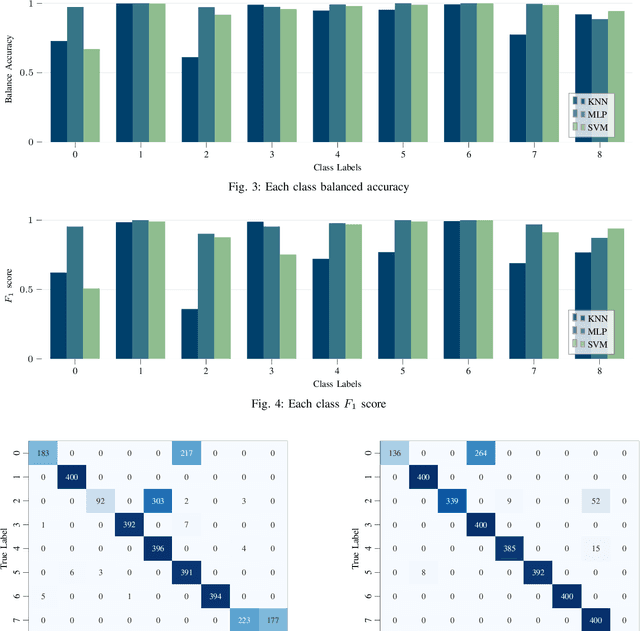
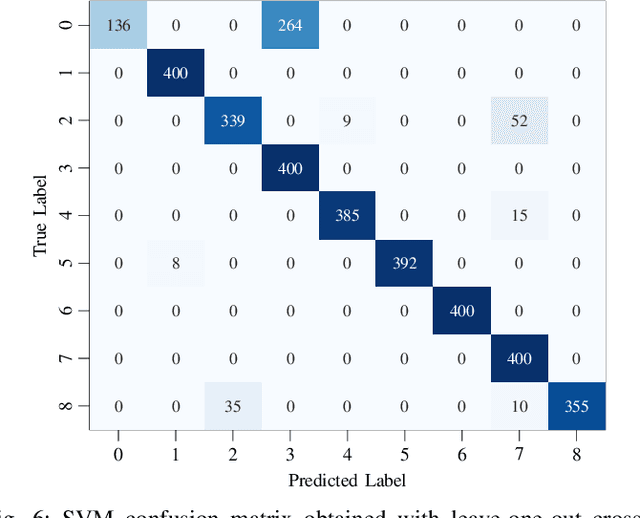
Human pose estimation involves detecting and tracking the positions of various body parts using input data from sources such as images, videos, or motion and inertial sensors. This paper presents a novel approach to human pose estimation using machine learning algorithms to predict human posture and translate them into robot motion commands using ultra-wideband (UWB) nodes, as an alternative to motion sensors. The study utilizes five UWB sensors implemented on the human body to enable the classification of still poses and more robust posture recognition. This approach ensures effective posture recognition across a variety of subjects. These range measurements serve as input features for posture prediction models, which are implemented and compared for accuracy. For this purpose, machine learning algorithms including K-Nearest Neighbors (KNN), Support Vector Machine (SVM), and deep Multi-Layer Perceptron (MLP) neural network are employed and compared in predicting corresponding postures. We demonstrate the proposed approach for real-time control of different mobile/aerial robots with inference implemented in a ROS 2 node. Experimental results demonstrate the efficacy of the approach, showcasing successful prediction of human posture and corresponding robot movements with high accuracy.
A neural network based controller for underwater robotic vehicles
May 23, 2022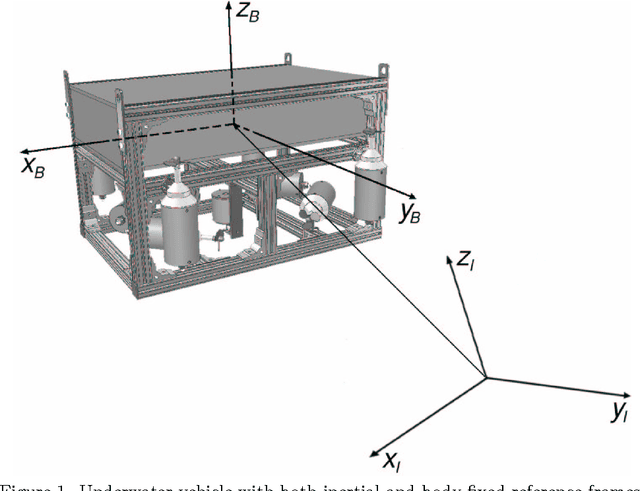
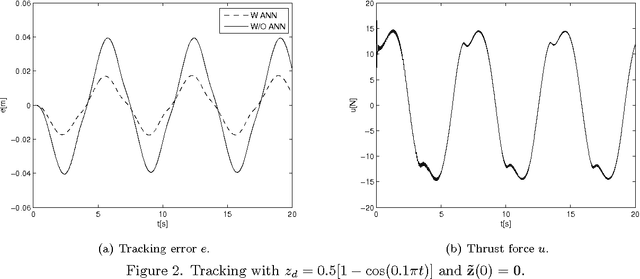
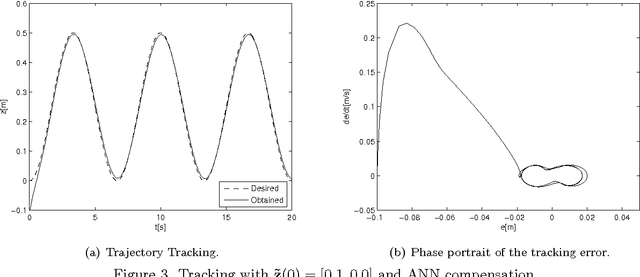
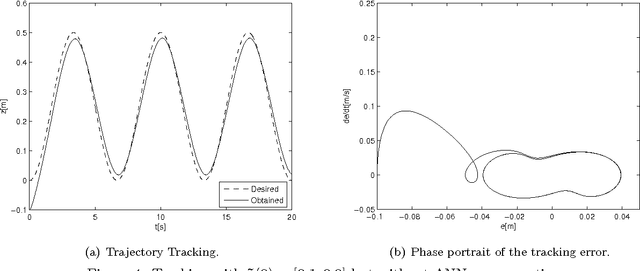
Due to the enormous technological improvements obtained in the last decades it is possible to use robotic vehicles for underwater exploration. This work describes the development of a dynamic positioning system for remotely operated underwater vehicles based. The adopted approach is developed using Lyapunov Stability Theory and enhanced by a neural network based algorithm for uncertainty and disturbance compensation. The performance of the proposed control scheme is evaluated by means of numerical simulations.
Intelligent control of a single-link flexible manipulator using sliding modes and artificial neural networks
Mar 21, 2022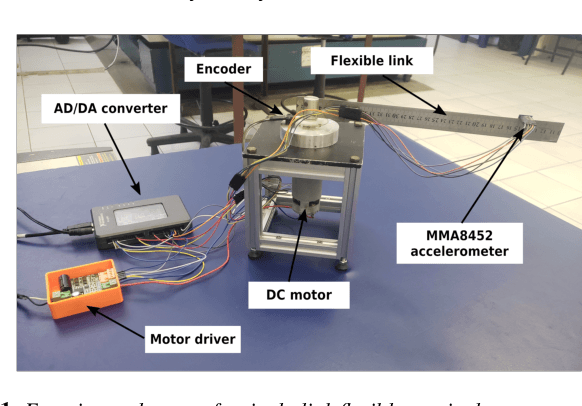
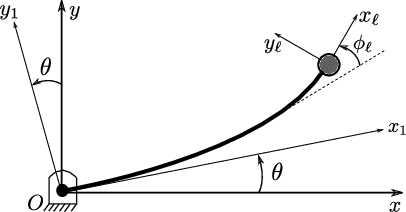
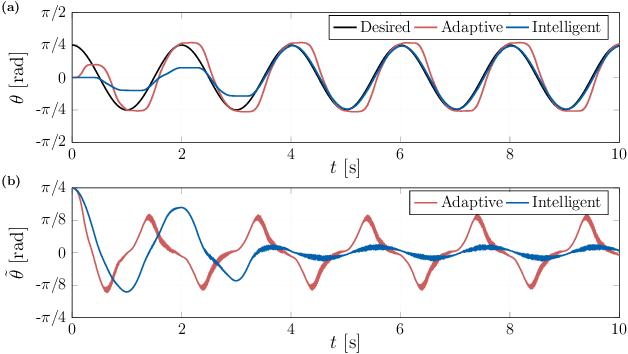
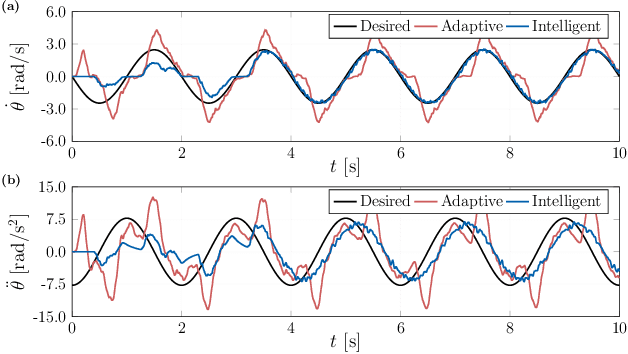
This letter presents a new intelligent control scheme for the accurate trajectory tracking of flexible link manipulators. The proposed approach is mainly based on a sliding mode controller for underactuated systems with an embedded artificial neural network to deal with modeling inaccuracies. The adopted neural network only needs a single input and one hidden layer, which drastically reduces the computational complexity of the control law and allows its implementation in low-power microcontrollers. Online learning, rather than supervised offline training, is chosen to allow the weights of the neural network to be adjusted in real time during the tracking. Therefore, the resulting controller is able to cope with the underactuating issues and to adapt itself by learning from experience, which grants the capacity to deal with plant dynamics properly. The boundedness and convergence properties of the tracking error are proved by evoking Barbalat's lemma in a Lyapunov-like stability analysis. Experimental results obtained with a small single-link flexible manipulator show the efficacy of the proposed control scheme, even in the presence of a high level of uncertainty and noisy signals.
* 4 pages, 5 figures