Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA neural network based controller for underwater robotic vehicles
May 23, 2022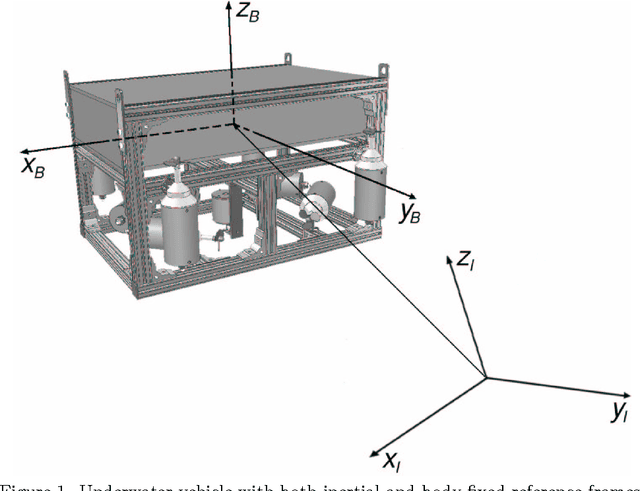
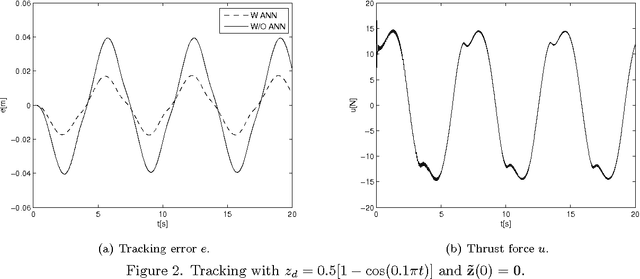
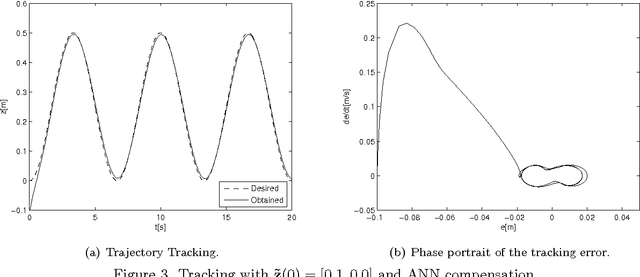
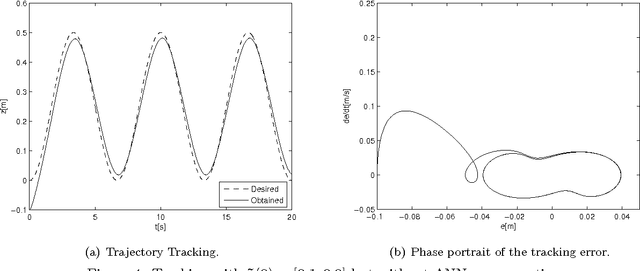
Due to the enormous technological improvements obtained in the last decades it is possible to use robotic vehicles for underwater exploration. This work describes the development of a dynamic positioning system for remotely operated underwater vehicles based. The adopted approach is developed using Lyapunov Stability Theory and enhanced by a neural network based algorithm for uncertainty and disturbance compensation. The performance of the proposed control scheme is evaluated by means of numerical simulations.
Via