 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecure Heterogeneous Multi-Robot Collaboration and Docking with Hyperledger Fabric Blockchain
Paper and Code
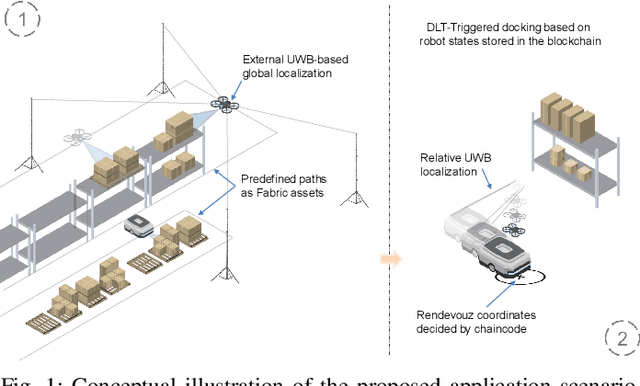
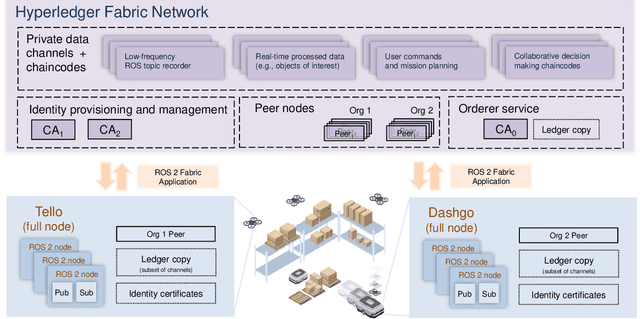
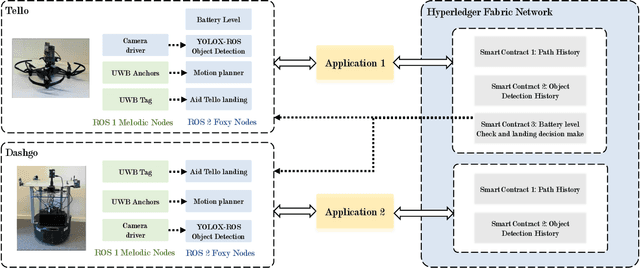
In recent years, multi-robot systems have received increasing attention from both industry and academia. Besides the need of accurate and robust estimation of relative localization, security and trust in the system are essential to enable wider adoption. In this paper, we propose a framework using Hyperledger Fabric for multi-robot collaboration in industrial applications. We rely on blockchain identities for the interaction of ground and aerial robots, and use smart contracts for collaborative decision making. The use of ultra-wideband (UWB) localization for both autonomous navigation and robot collaboration extends our previous work in Fabric-based fleet management. We focus on an inventory management application which uses a ground robot and an aerial robot to inspect a warehouse-like environment and store information about the found objects in the blockchain. We measure the impact of adding the blockchain layer, analyze the transaction commit latency and compare the resource utilization of blockchain-related processes to the already running data processing modules.