 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAFEVPR: Patch-Based Conformal Verification for Safe Cross-Condition Sequence Visual Place Recognition
May 27, 2026Sequence-based visual place recognition (VPR) for SLAM and robot relocalization must decide whether the retrieved top-1 candidate is safe to accept. Conformal prediction is a natural framework for this accept/reject decision, but its finite-sample guarantees rely on exchangeability between calibration and deployment (test) data, which is violated under cross-condition deployment. We introduce SAFEVPR, a non-trainable verification-and-calibration pipeline for safe cross-condition sequence VPR. SAFEVPR replaces the standard backbone cosine similarity with a mutual-nearest-neighbour (MNN) patch-matching score computed from frozen DINOv2 ViT features, and replaces flat Learn-Then-Test calibration with Mondrian conformal LTT, fitting separate Bonferroni-corrected thresholds across score bins. Under exchangeability, these thresholds would provide finite-sample false-discovery-rate (FDR) control; under condition shift, we evaluate empirical validity per deployment. Across 23 cross-condition setups from Oxford RobotCar, NCLT, and St Lucia datasets, using three frozen VPR backbones, SAFEVPR is empirically valid on 23/23 setups at target FDR alpha = 0.10, achieving mean accepted FDR 0.014 and mean true-positive rate (TPR) 0.75. The results show that raw discrimination alone is not sufficient for conformal validity: AnyLoc-VLAD and Super-Point+LightGlue reach comparable area under the receiver operating characteristic curve (AUROC) but fail more setups under the same calibration. On textureless repetitive scenery, SAFEVPR safely abstains rather than accepting unreliable matches. Code is available at https://github.com/Hasar12139/SafeVPR.
Seamless Outdoor-Indoor Pedestrian Positioning System with GNSS/UWB/IMU Fusion: A Comparison of EKF, FGO, and PF
Dec 11, 2025Accurate and continuous pedestrian positioning across outdoor-indoor environments remains challenging because GNSS, UWB, and inertial PDR are complementary yet individually fragile under signal blockage, multipath, and drift. This paper presents a unified GNSS/UWB/IMU fusion framework for seamless pedestrian localization and provides a controlled comparison of three probabilistic back-ends: an error-state extended Kalman filter, sliding-window factor graph optimization, and a particle filter. The system uses chest-mounted IMU-based PDR as the motion backbone and integrates absolute updates from GNSS outdoors and UWB indoors. To enhance transition robustness and mitigate urban GNSS degradation, we introduce a lightweight map-based feasibility constraint derived from OpenStreetMap building footprints, treating most building interiors as non-navigable while allowing motion inside a designated UWB-instrumented building. The framework is implemented in ROS 2 and runs in real time on a wearable platform, with visualization in Foxglove. We evaluate three scenarios: indoor (UWB+PDR), outdoor (GNSS+PDR), and seamless outdoor-indoor (GNSS+UWB+PDR). Results show that the ESKF provides the most consistent overall performance in our implementation.
Cut out and Replay: A Simple yet Versatile Strategy for Multi-Label Online Continual Learning
May 26, 2025Multi-Label Online Continual Learning (MOCL) requires models to learn continuously from endless multi-label data streams, facing complex challenges including persistent catastrophic forgetting, potential missing labels, and uncontrollable imbalanced class distributions. While existing MOCL methods attempt to address these challenges through various techniques, \textit{they all overlook label-specific region identifying and feature learning} - a fundamental solution rooted in multi-label learning but challenging to achieve in the online setting with incremental and partial supervision. To this end, we first leverage the inherent structural information of input data to evaluate and verify the innate localization capability of different pre-trained models. Then, we propose CUTER (CUT-out-and-Experience-Replay), a simple yet versatile strategy that provides fine-grained supervision signals by further identifying, strengthening and cutting out label-specific regions for efficient experience replay. It not only enables models to simultaneously address catastrophic forgetting, missing labels, and class imbalance challenges, but also serves as an orthogonal solution that seamlessly integrates with existing approaches. Extensive experiments on multiple multi-label image benchmarks demonstrate the superiority of our proposed method. The code is available at \href{https://github.com/wxr99/Cut-Replay}{https://github.com/wxr99/Cut-Replay}
Event-based Sensor Fusion and Application on Odometry: A Survey
Oct 20, 2024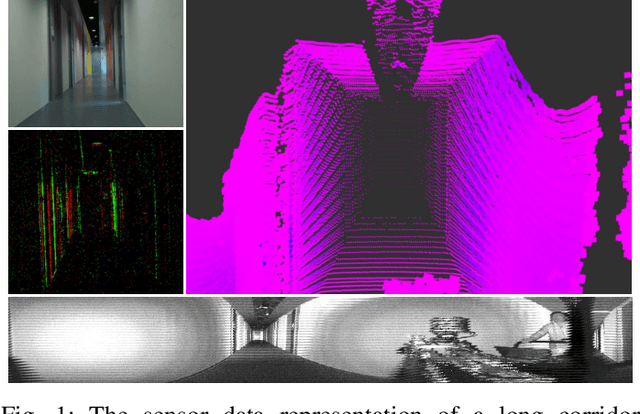

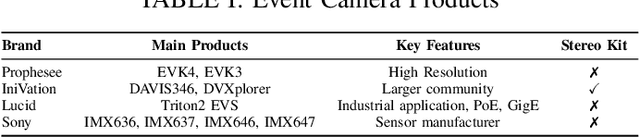

Event cameras, inspired by biological vision, are asynchronous sensors that detect changes in brightness, offering notable advantages in environments characterized by high-speed motion, low lighting, or wide dynamic range. These distinctive properties render event cameras particularly effective for sensor fusion in robotics and computer vision, especially in enhancing traditional visual or LiDAR-inertial odometry. Conventional frame-based cameras suffer from limitations such as motion blur and drift, which can be mitigated by the continuous, low-latency data provided by event cameras. Similarly, LiDAR-based odometry encounters challenges related to the loss of geometric information in environments such as corridors. To address these limitations, unlike the existing event camera-related surveys, this paper presents a comprehensive overview of recent advancements in event-based sensor fusion for odometry applications particularly, investigating fusion strategies that incorporate frame-based cameras, inertial measurement units (IMUs), and LiDAR. The survey critically assesses the contributions of these fusion methods to improving odometry performance in complex environments, while highlighting key applications, and discussing the strengths, limitations, and unresolved challenges. Additionally, it offers insights into potential future research directions to advance event-based sensor fusion for next-generation odometry applications.
Topology Reorganized Graph Contrastive Learning with Mitigating Semantic Drift
Jul 23, 2024
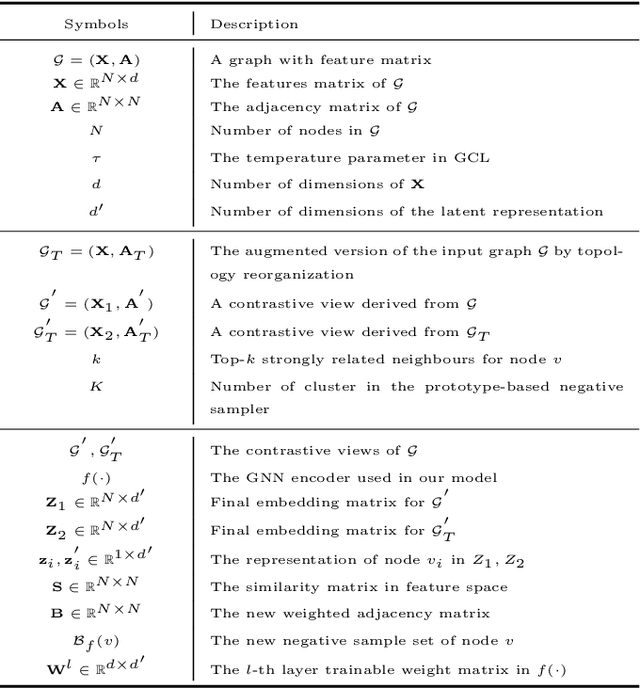

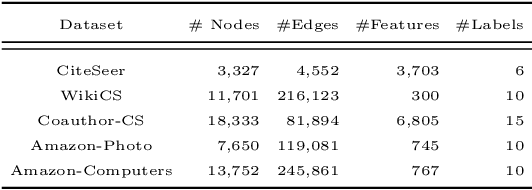
Graph contrastive learning (GCL) is an effective paradigm for node representation learning in graphs. The key components hidden behind GCL are data augmentation and positive-negative pair selection. Typical data augmentations in GCL, such as uniform deletion of edges, are generally blind and resort to local perturbation, which is prone to producing under-diversity views. Additionally, there is a risk of making the augmented data traverse to other classes. Moreover, most methods always treat all other samples as negatives. Such a negative pairing naturally results in sampling bias and likewise may make the learned representation suffer from semantic drift. Therefore, to increase the diversity of the contrastive view, we propose two simple and effective global topological augmentations to compensate current GCL. One is to mine the semantic correlation between nodes in the feature space. The other is to utilize the algebraic properties of the adjacency matrix to characterize the topology by eigen-decomposition. With the help of both, we can retain important edges to build a better view. To reduce the risk of semantic drift, a prototype-based negative pair selection is further designed which can filter false negative samples. Extensive experiments on various tasks demonstrate the advantages of the model compared to the state-of-the-art methods.
Comparison of DDS, MQTT, and Zenoh in Edge-to-Edge and Edge-to-Cloud Communication for Distributed ROS 2 Systems
Sep 28, 2023The increased data transmission and number of devices involved in communications among distributed systems make it challenging yet significantly necessary to have an efficient and reliable networking middleware. In robotics and autonomous systems, the wide application of ROS\,2 brings the possibility of utilizing various networking middlewares together with DDS in ROS\,2 for better communication among edge devices or between edge devices and the cloud. However, there is a lack of comprehensive communication performance comparison of integrating these networking middlewares with ROS\,2. In this study, we provide a quantitative analysis for the communication performance of utilized networking middlewares including MQTT and Zenoh alongside DDS in ROS\,2 among a multiple host system. For a complete and reliable comparison, we calculate the latency and throughput of these middlewares by sending distinct amounts and types of data through different network setups including Ethernet, Wi-Fi, and 4G. To further extend the evaluation to real-world application scenarios, we assess the drift error (the position changes) over time caused by these networking middlewares with the robot moving in an identical square-shaped path. Our results show that CycloneDDS performs better under Ethernet while Zenoh performs better under Wi-Fi and 4G. In the actual robot test, the robot moving trajectory drift error over time (96\,s) via Zenoh is the smallest. It is worth noting we have a discussion of the CPU utilization of these networking middlewares and the performance impact caused by enabling the security feature in ROS\,2 at the end of the paper.
Distributed Robotic Systems in the Edge-Cloud Continuum with ROS 2: a Review on Novel Architectures and Technology Readiness
Nov 02, 2022

Robotic systems are more connected, networked, and distributed than ever. New architectures that comply with the \textit{de facto} robotics middleware standard, ROS\,2, have recently emerged to fill the gap in terms of hybrid systems deployed from edge to cloud. This paper reviews new architectures and technologies that enable containerized robotic applications to seamlessly run at the edge or in the cloud. We also overview systems that include solutions from extension to ROS\,2 tooling to the integration of Kubernetes and ROS\,2. Another important trend is robot learning, and how new simulators and cloud simulations are enabling, e.g., large-scale reinforcement learning or distributed federated learning solutions. This has also enabled deeper integration of continuous interaction and continuous deployment (CI/CD) pipelines for robotic systems development, going beyond standard software unit tests with simulated tests to build and validate code automatically. We discuss the current technology readiness and list the potential new application scenarios that are becoming available. Finally, we discuss the current challenges in distributed robotic systems and list open research questions in the field.
Reconstruction Enhanced Multi-View Contrastive Learning for Anomaly Detection on Attributed Networks
May 10, 2022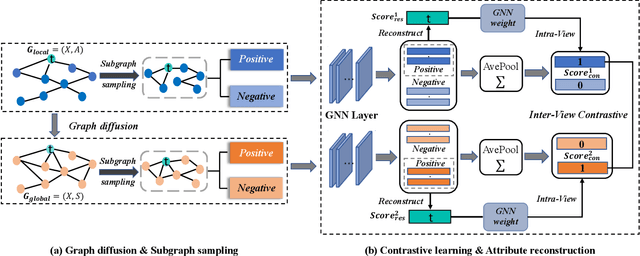
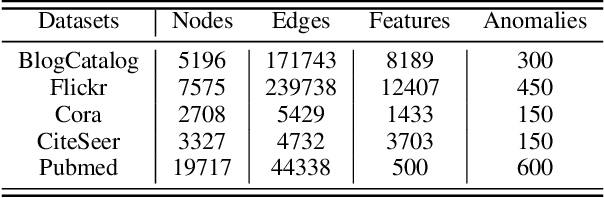
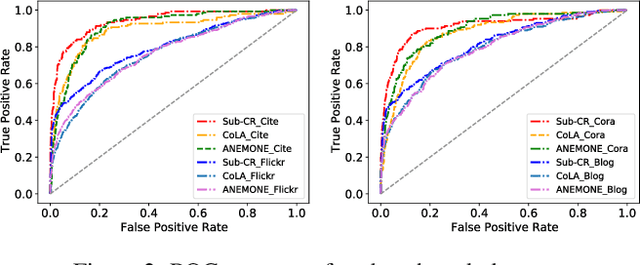
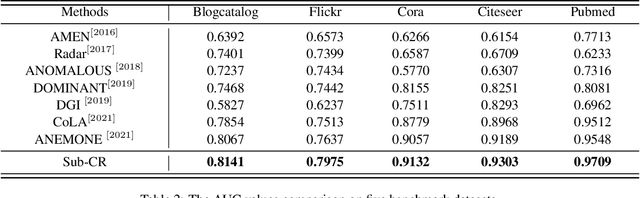
Detecting abnormal nodes from attributed networks is of great importance in many real applications, such as financial fraud detection and cyber security. This task is challenging due to both the complex interactions between the anomalous nodes with other counterparts and their inconsistency in terms of attributes. This paper proposes a self-supervised learning framework that jointly optimizes a multi-view contrastive learning-based module and an attribute reconstruction-based module to more accurately detect anomalies on attributed networks. Specifically, two contrastive learning views are firstly established, which allow the model to better encode rich local and global information related to the abnormality. Motivated by the attribute consistency principle between neighboring nodes, a masked autoencoder-based reconstruction module is also introduced to identify the nodes which have large reconstruction errors, then are regarded as anomalies. Finally, the two complementary modules are integrated for more accurately detecting the anomalous nodes. Extensive experiments conducted on five benchmark datasets show our model outperforms current state-of-the-art models.