 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRFM-Pose:Reinforcement-Guided Flow Matching for Fast Category-Level 6D Pose Estimation
Feb 05, 2026Object pose estimation is a fundamental problem in computer vision and plays a critical role in virtual reality and embodied intelligence, where agents must understand and interact with objects in 3D space. Recently, score based generative models have to some extent solved the rotational symmetry ambiguity problem in category level pose estimation, but their efficiency remains limited by the high sampling cost of score-based diffusion. In this work, we propose a new framework, RFM-Pose, that accelerates category-level 6D object pose generation while actively evaluating sampled hypotheses. To improve sampling efficiency, we adopt a flow-matching generative model and generate pose candidates along an optimal transport path from a simple prior to the pose distribution. To further refine these candidates, we cast the flow-matching sampling process as a Markov decision process and apply proximal policy optimization to fine-tune the sampling policy. In particular, we interpret the flow field as a learnable policy and map an estimator to a value network, enabling joint optimization of pose generation and hypothesis scoring within a reinforcement learning framework. Experiments on the REAL275 benchmark demonstrate that RFM-Pose achieves favorable performance while significantly reducing computational cost. Moreover, similar to prior work, our approach can be readily adapted to object pose tracking and attains competitive results in this setting.
PE-Planner: A Performance-Enhanced Quadrotor Motion Planner for Autonomous Flight in Complex and Dynamic Environments
Mar 19, 2024
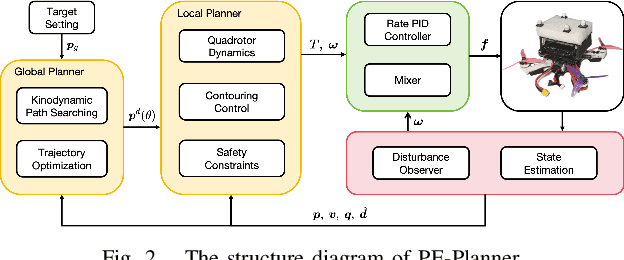

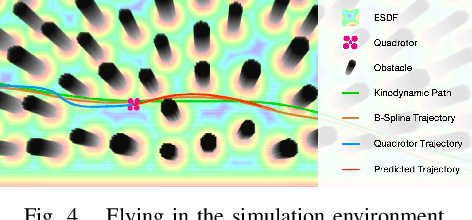
The role of a motion planner is pivotal in quadrotor applications, yet existing methods often struggle to adapt to complex environments, limiting their ability to achieve fast, safe, and robust flight. In this letter, we introduce a performance-enhanced quadrotor motion planner designed for autonomous flight in complex environments including dense obstacles, dynamic obstacles, and unknown disturbances. The global planner generates an initial trajectory through kinodynamic path searching and refines it using B-spline trajectory optimization. Subsequently, the local planner takes into account the quadrotor dynamics, estimated disturbance, global reference trajectory, control cost, time cost, and safety constraints to generate real-time control inputs, utilizing the framework of model predictive contouring control. Both simulations and real-world experiments corroborate the heightened robustness, safety, and speed of the proposed motion planner. Additionally, our motion planner achieves flights at more than 6.8 m/s in a challenging and complex racing scenario.
SRL-ORCA: A Socially Aware Multi-Agent Mapless Navigation Algorithm In Complex Dynamic Scenes
Jun 18, 2023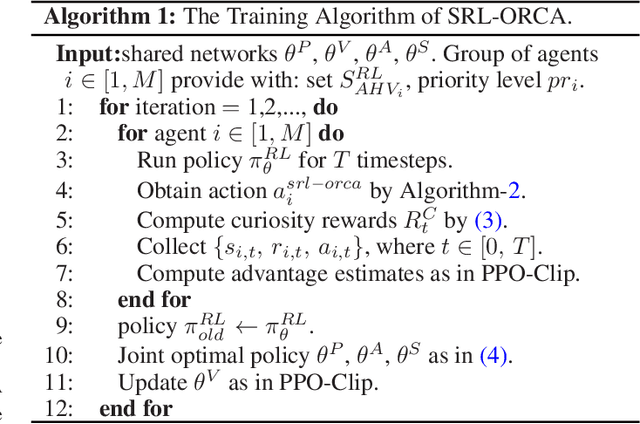
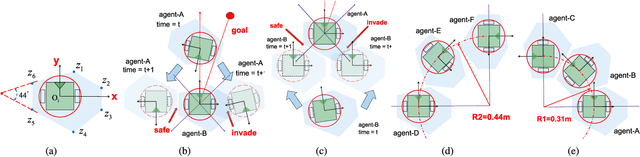
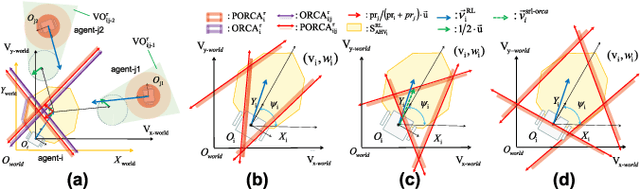
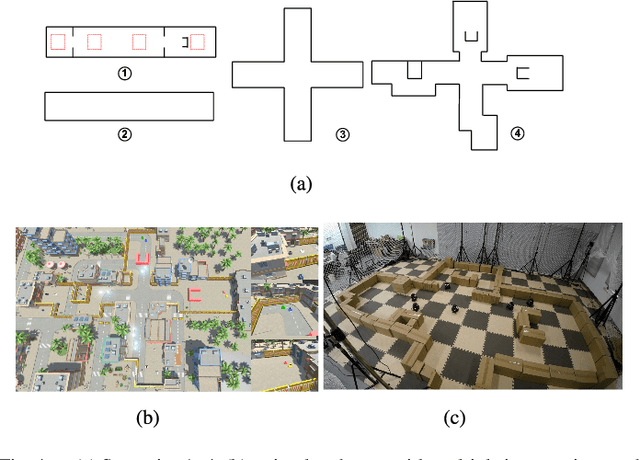
For real-world navigation, it is important to endow robots with the capabilities to navigate safely and efficiently in a complex environment with both dynamic and non-convex static obstacles. However, achieving path-finding in non-convex complex environments without maps as well as enabling multiple robots to follow social rules for obstacle avoidance remains challenging problems. In this letter, we propose a socially aware robot mapless navigation algorithm, namely Safe Reinforcement Learning-Optimal Reciprocal Collision Avoidance (SRL-ORCA). This is a multi-agent safe reinforcement learning algorithm by using ORCA as an external knowledge to provide a safety guarantee. This algorithm further introduces traffic norms of human society to improve social comfort and achieve cooperative avoidance by following human social customs. The result of experiments shows that SRL-ORCA learns strategies to obey specific traffic rules. Compared to DRL, SRL-ORCA shows a significant improvement in navigation success rate in different complex scenarios mixed with the application of the same training network. SRL-ORCA is able to cope with non-convex obstacle environments without falling into local minimal regions and has a 14.1\% improvement in path quality (i.e., the average time to target) compared to ORCA. Videos are available at https://youtu.be/huhXfCDkGws.
Distributed Coverage Control of Constrained Constant-Speed Unicycle Multi-Agent Systems
Apr 12, 2023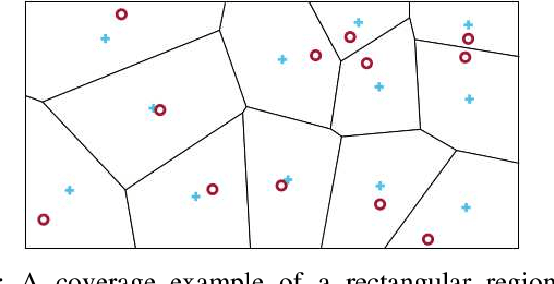
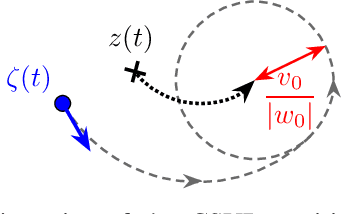
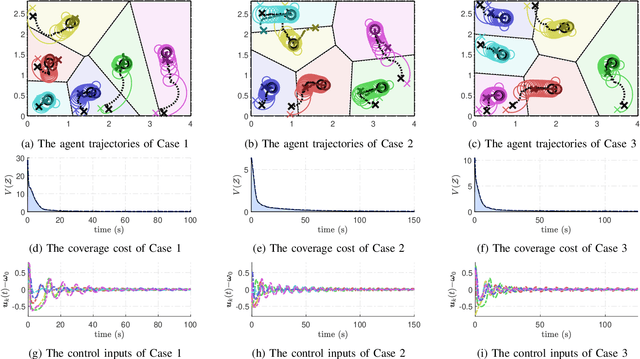
This paper proposes a novel distributed coverage controller for a multi-agent system with constant-speed unicycle robots (CSUR). The work is motivated by the limitation of the conventional method that does not ensure the satisfaction of hard state- and input-dependent constraints and leads to feasibility issues for multi-CSUR systems. In this paper, we solve these problems by designing a novel coverage cost function and a saturated gradient-search-based control law. Invariant set theory and Lyapunov-based techniques are used to prove the state-dependent confinement and the convergence of the system state to the optimal coverage configuration, respectively. The controller is implemented in a distributed manner based on a novel communication standard among the agents. A series of simulation case studies are conducted to validate the effectiveness of the proposed coverage controller in different initial conditions and with control parameters. A comparison study in simulation reveals the advantage of the proposed method in terms of avoiding infeasibility. The experiment study verifies the applicability of the method to real robots with uncertainties. The development procedure of the method from theoretical analysis to experimental validation provides a novel framework for multi-agent system coordinate control with complex agent dynamics.
Average Communication Rate for Event-Triggered Stochastic Control Systems
Jan 13, 2023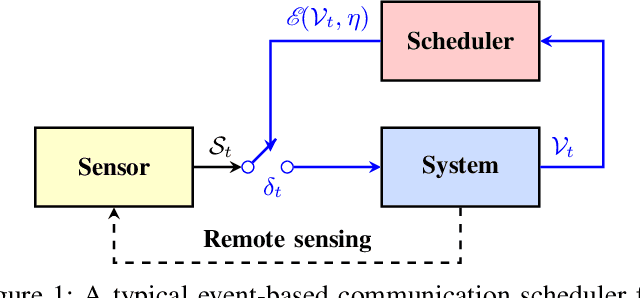



Quantification of the triggering rates of an event-triggered stochastic system with deterministic thresholds is a challenging problem due to the non-stationary nature of the system's stochastic processes. A typical example is the computation of the average communication rate (ACR) of the networked event-triggered stochastic control systems (ET-SCS) of which the communication of the sensor network is scheduled by whether a system variable of interest exceeds predefined constant thresholds. For such a system, a closed-loop effect emerges due to the interdependence between the system variable and the trigger of communication. This effect, commonly referred to as \textit{side information} by related work, distorts the stochastic distribution of the system variables and makes the ACR computation non-trivial. Previous work in this area used to over-simplify the computation by ignoring the side information and misusing a Gaussian distribution, which leads to approximated results. This paper proposes both analytical and numerical approaches to predict the exact ACR for an ET-SCS using a recursive model. Furthermore, we use theoretical analysis and a numerical study to qualitatively evaluate the deviation gap of the conventional approach that ignores the side information. The accuracy of our proposed method, alongside its comparison with the simplified results of the conventional approach, is validated by experimental studies. Our work is promising to benefit the efficient resource planning of networked control systems with limited communication resources by providing accurate ACR computation.
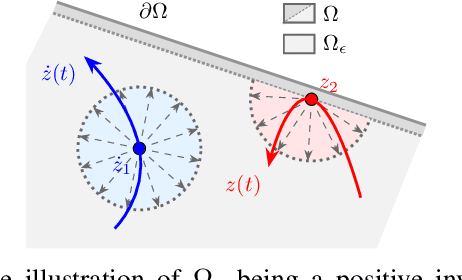
Distributed Event- and Self-Triggered Coverage Control with Speed Constrained Unicycle Robots
Jul 30, 2021



Voronoi coverage control is a particular problem of importance in the area of multi-robot systems, which considers a network of multiple autonomous robots, tasked with optimally covering a large area. This is a common task for fleets of fixed-wing Unmanned Aerial Vehicles (UAVs), which are described in this work by a unicycle model with constant forward-speed constraints. We develop event-based control/communication algorithms to relax the resource requirements on wireless communication and control actuators, an important feature for battery-driven or otherwise energy-constrained systems. To overcome the drawback that the event-triggered algorithm requires continuous measurement of system states, we propose a self-triggered algorithm to estimate the next triggering time. Hardware experiments illustrate the theoretical results.
FedXGBoost: Privacy-Preserving XGBoost for Federated Learning
Jun 22, 2021
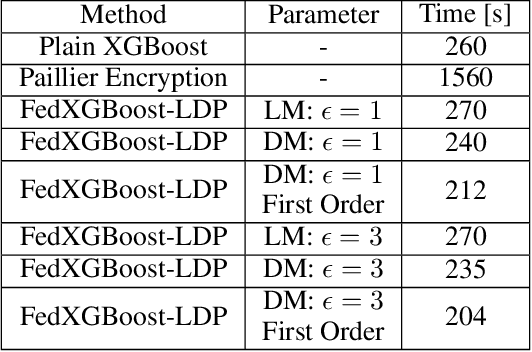


Federated learning is the distributed machine learning framework that enables collaborative training across multiple parties while ensuring data privacy. Practical adaptation of XGBoost, the state-of-the-art tree boosting framework, to federated learning remains limited due to high cost incurred by conventional privacy-preserving methods. To address the problem, we propose two variants of federated XGBoost with privacy guarantee: FedXGBoost-SMM and FedXGBoost-LDP. Our first protocol FedXGBoost-SMM deploys enhanced secure matrix multiplication method to preserve privacy with lossless accuracy and lower overhead than encryption-based techniques. Developed independently, the second protocol FedXGBoost-LDP is heuristically designed with noise perturbation for local differential privacy, and empirically evaluated on real-world and synthetic datasets.
Cooperative event-based rigid formation control
Jan 11, 2019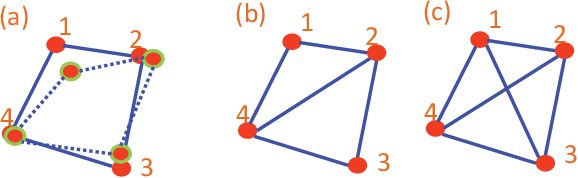
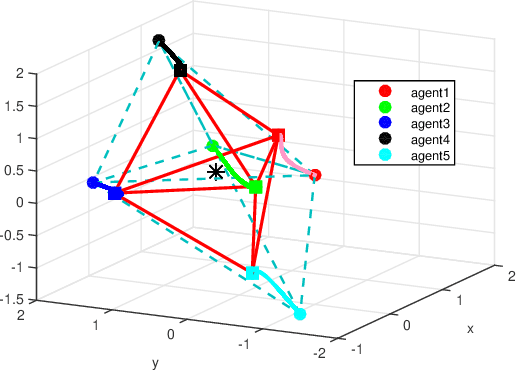
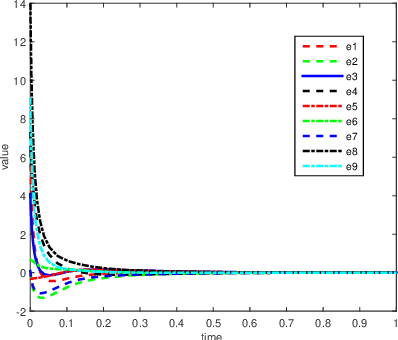
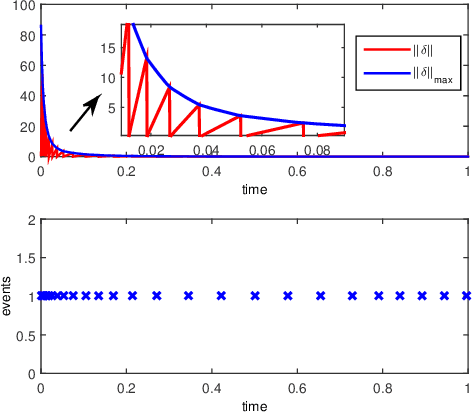
This paper discusses cooperative stabilization control of rigid formations via an event-based approach. We first design a centralized event-based formation control system, in which a central event controller determines the next triggering time and broadcasts the event signal to all the agents for control input update. We then build on this approach to propose a distributed event control strategy, in which each agent can use its local event trigger and local information to update the control input at its own event time. For both cases, the triggering condition, event function and triggering behavior are discussed in detail, and the exponential convergence of the event-based formation system is guaranteed.