 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMindChat: A Privacy-preserving Large Language Model for Mental Health Support
Jan 05, 2026Large language models (LLMs) have shown promise for mental health support, yet training such models is constrained by the scarcity and sensitivity of real counseling dialogues. In this article, we present MindChat, a privacy-preserving LLM for mental health support, together with MindCorpus, a synthetic multi-turn counseling dataset constructed via a multi-agent role-playing framework. To synthesize high-quality counseling data, the developed dialogue-construction framework employs a dual closed-loop feedback design to integrate psychological expertise and counseling techniques through role-playing: (i) turn-level critique-and-revision to improve coherence and counseling appropriateness within a session, and (ii) session-level strategy refinement to progressively enrich counselor behaviors across sessions. To mitigate privacy risks under decentralized data ownership, we fine-tune the base model using federated learning with parameter-efficient LoRA adapters and incorporate differentially private optimization to reduce membership and memorization risks. Experiments on synthetic-data quality assessment and counseling capability evaluation show that MindCorpus improves training effectiveness and that MindChat is competitive with existing general and counseling-oriented LLM baselines under both automatic LLM-judge and human evaluation protocols, while exhibiting reduced privacy leakage under membership inference attacks.
Do You Have Freestyle? Expressive Humanoid Locomotion via Audio Control
Dec 29, 2025Humans intuitively move to sound, but current humanoid robots lack expressive improvisational capabilities, confined to predefined motions or sparse commands. Generating motion from audio and then retargeting it to robots relies on explicit motion reconstruction, leading to cascaded errors, high latency, and disjointed acoustic-actuation mapping. We propose RoboPerform, the first unified audio-to-locomotion framework that can directly generate music-driven dance and speech-driven co-speech gestures from audio. Guided by the core principle of "motion = content + style", the framework treats audio as implicit style signals and eliminates the need for explicit motion reconstruction. RoboPerform integrates a ResMoE teacher policy for adapting to diverse motion patterns and a diffusion-based student policy for audio style injection. This retargeting-free design ensures low latency and high fidelity. Experimental validation shows that RoboPerform achieves promising results in physical plausibility and audio alignment, successfully transforming robots into responsive performers capable of reacting to audio.
Decentralized Event-Triggered Online Learning for Safe Consensus of Multi-Agent Systems with Gaussian Process Regression
Feb 05, 2024Consensus control in multi-agent systems has received significant attention and practical implementation across various domains. However, managing consensus control under unknown dynamics remains a significant challenge for control design due to system uncertainties and environmental disturbances. This paper presents a novel learning-based distributed control law, augmented by an auxiliary dynamics. Gaussian processes are harnessed to compensate for the unknown components of the multi-agent system. For continuous enhancement in predictive performance of Gaussian process model, a data-efficient online learning strategy with a decentralized event-triggered mechanism is proposed. Furthermore, the control performance of the proposed approach is ensured via the Lyapunov theory, based on a probabilistic guarantee for prediction error bounds. To demonstrate the efficacy of the proposed learning-based controller, a comparative analysis is conducted, contrasting it with both conventional distributed control laws and offline learning methodologies.
Distributed Coverage Control of Constrained Constant-Speed Unicycle Multi-Agent Systems
Apr 12, 2023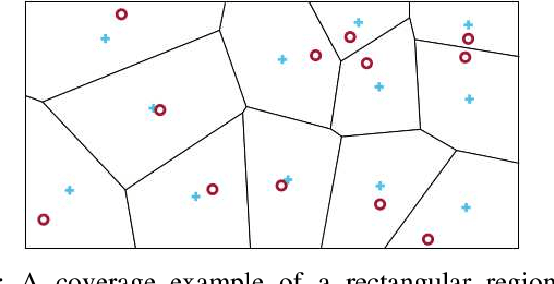
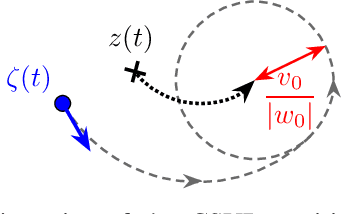
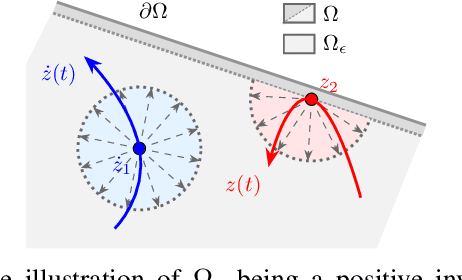
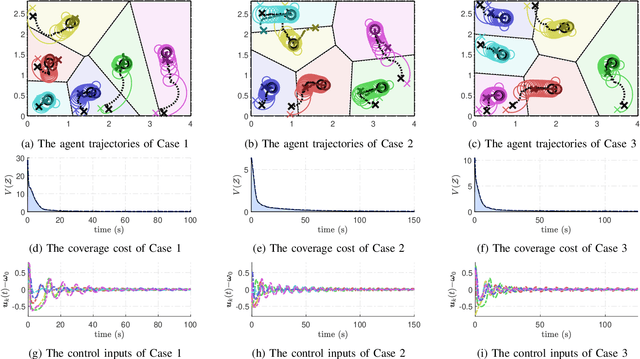
This paper proposes a novel distributed coverage controller for a multi-agent system with constant-speed unicycle robots (CSUR). The work is motivated by the limitation of the conventional method that does not ensure the satisfaction of hard state- and input-dependent constraints and leads to feasibility issues for multi-CSUR systems. In this paper, we solve these problems by designing a novel coverage cost function and a saturated gradient-search-based control law. Invariant set theory and Lyapunov-based techniques are used to prove the state-dependent confinement and the convergence of the system state to the optimal coverage configuration, respectively. The controller is implemented in a distributed manner based on a novel communication standard among the agents. A series of simulation case studies are conducted to validate the effectiveness of the proposed coverage controller in different initial conditions and with control parameters. A comparison study in simulation reveals the advantage of the proposed method in terms of avoiding infeasibility. The experiment study verifies the applicability of the method to real robots with uncertainties. The development procedure of the method from theoretical analysis to experimental validation provides a novel framework for multi-agent system coordinate control with complex agent dynamics.
FedXGBoost: Privacy-Preserving XGBoost for Federated Learning
Jun 22, 2021
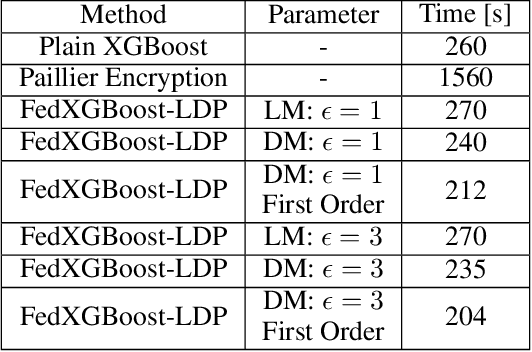


Federated learning is the distributed machine learning framework that enables collaborative training across multiple parties while ensuring data privacy. Practical adaptation of XGBoost, the state-of-the-art tree boosting framework, to federated learning remains limited due to high cost incurred by conventional privacy-preserving methods. To address the problem, we propose two variants of federated XGBoost with privacy guarantee: FedXGBoost-SMM and FedXGBoost-LDP. Our first protocol FedXGBoost-SMM deploys enhanced secure matrix multiplication method to preserve privacy with lossless accuracy and lower overhead than encryption-based techniques. Developed independently, the second protocol FedXGBoost-LDP is heuristically designed with noise perturbation for local differential privacy, and empirically evaluated on real-world and synthetic datasets.