 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUbiQVision: Quantifying Uncertainty in XAI for Image Recognition
Dec 23, 2025Recent advances in deep learning have led to its widespread adoption across diverse domains, including medical imaging. This progress is driven by increasingly sophisticated model architectures, such as ResNets, Vision Transformers, and Hybrid Convolutional Neural Networks, that offer enhanced performance at the cost of greater complexity. This complexity often compromises model explainability and interpretability. SHAP has emerged as a prominent method for providing interpretable visualizations that aid domain experts in understanding model predictions. However, SHAP explanations can be unstable and unreliable in the presence of epistemic and aleatoric uncertainty. In this study, we address this challenge by using Dirichlet posterior sampling and Dempster-Shafer theory to quantify the uncertainty that arises from these unstable explanations in medical imaging applications. The framework uses a belief, plausible, and fusion map approach alongside statistical quantitative analysis to produce quantification of uncertainty in SHAP. Furthermore, we evaluated our framework on three medical imaging datasets with varying class distributions, image qualities, and modality types which introduces noise due to varying image resolutions and modality-specific aspect covering the examples from pathology, ophthalmology, and radiology, introducing significant epistemic uncertainty.
PepTriX: A Framework for Explainable Peptide Analysis through Protein Language Models
Nov 13, 2025Peptide classification tasks, such as predicting toxicity and HIV inhibition, are fundamental to bioinformatics and drug discovery. Traditional approaches rely heavily on handcrafted encodings of one-dimensional (1D) peptide sequences, which can limit generalizability across tasks and datasets. Recently, protein language models (PLMs), such as ESM-2 and ESMFold, have demonstrated strong predictive performance. However, they face two critical challenges. First, fine-tuning is computationally costly. Second, their complex latent representations hinder interpretability for domain experts. Additionally, many frameworks have been developed for specific types of peptide classification, lacking generalization. These limitations restrict the ability to connect model predictions to biologically relevant motifs and structural properties. To address these limitations, we present PepTriX, a novel framework that integrates one dimensional (1D) sequence embeddings and three-dimensional (3D) structural features via a graph attention network enhanced with contrastive training and cross-modal co-attention. PepTriX automatically adapts to diverse datasets, producing task-specific peptide vectors while retaining biological plausibility. After evaluation by domain experts, we found that PepTriX performs remarkably well across multiple peptide classification tasks and provides interpretable insights into the structural and biophysical motifs that drive predictions. Thus, PepTriX offers both predictive robustness and interpretable validation, bridging the gap between performance-driven peptide-level models (PLMs) and domain-level understanding in peptide research.
MetaMP: Seamless Metadata Enrichment and AI Application Framework for Enhanced Membrane Protein Visualization and Analysis
Oct 06, 2025Structural biology has made significant progress in determining membrane proteins, leading to a remarkable increase in the number of available structures in dedicated databases. The inherent complexity of membrane protein structures, coupled with challenges such as missing data, inconsistencies, and computational barriers from disparate sources, underscores the need for improved database integration. To address this gap, we present MetaMP, a framework that unifies membrane-protein databases within a web application and uses machine learning for classification. MetaMP improves data quality by enriching metadata, offering a user-friendly interface, and providing eight interactive views for streamlined exploration. MetaMP was effective across tasks of varying difficulty, demonstrating advantages across different levels without compromising speed or accuracy, according to user evaluations. Moreover, MetaMP supports essential functions such as structure classification and outlier detection. We present three practical applications of Artificial Intelligence (AI) in membrane protein research: predicting transmembrane segments, reconciling legacy databases, and classifying structures with explainable AI support. In a validation focused on statistics, MetaMP resolved 77% of data discrepancies and accurately predicted the class of newly identified membrane proteins 98% of the time and overtook expert curation. Altogether, MetaMP is a much-needed resource that harmonizes current knowledge and empowers AI-driven exploration of membrane-protein architecture.
PHAX: A Structured Argumentation Framework for User-Centered Explainable AI in Public Health and Biomedical Sciences
Jul 29, 2025Ensuring transparency and trust in AI-driven public health and biomedical sciences systems requires more than accurate predictions-it demands explanations that are clear, contextual, and socially accountable. While explainable AI (XAI) has advanced in areas like feature attribution and model interpretability, most methods still lack the structure and adaptability needed for diverse health stakeholders, including clinicians, policymakers, and the general public. We introduce PHAX-a Public Health Argumentation and eXplainability framework-that leverages structured argumentation to generate human-centered explanations for AI outputs. PHAX is a multi-layer architecture combining defeasible reasoning, adaptive natural language techniques, and user modeling to produce context-aware, audience-specific justifications. More specifically, we show how argumentation enhances explainability by supporting AI-driven decision-making, justifying recommendations, and enabling interactive dialogues across user types. We demonstrate the applicability of PHAX through use cases such as medical term simplification, patient-clinician communication, and policy justification. In particular, we show how simplification decisions can be modeled as argument chains and personalized based on user expertise-enhancing both interpretability and trust. By aligning formal reasoning methods with communicative demands, PHAX contributes to a broader vision of transparent, human-centered AI in public health.
AI Readiness in Healthcare through Storytelling XAI
Oct 24, 2024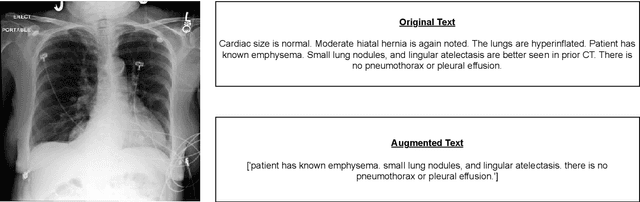
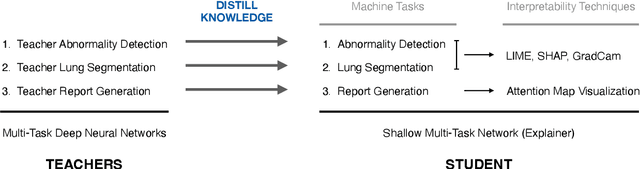
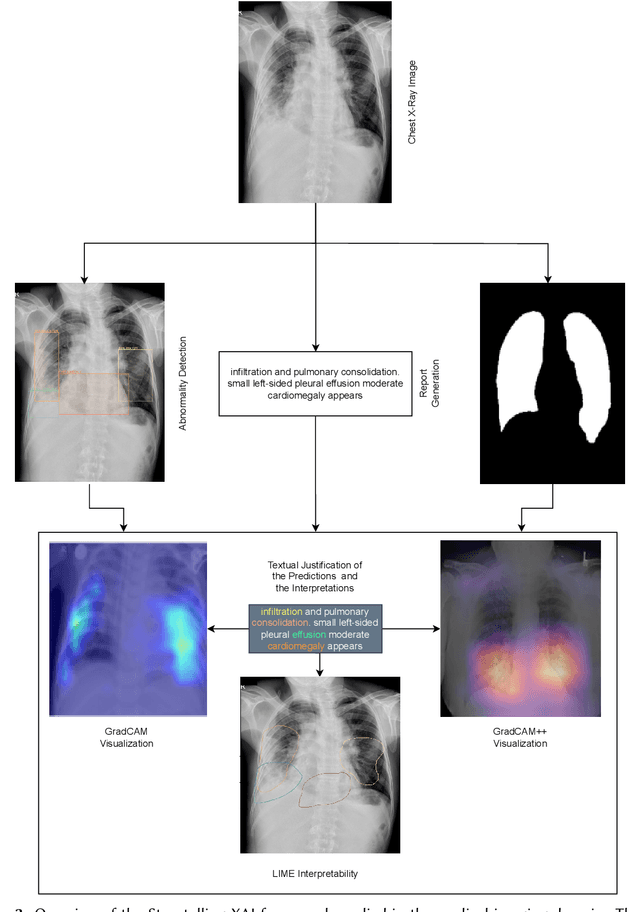
Artificial Intelligence is rapidly advancing and radically impacting everyday life, driven by the increasing availability of computing power. Despite this trend, the adoption of AI in real-world healthcare is still limited. One of the main reasons is the trustworthiness of AI models and the potential hesitation of domain experts with model predictions. Explainable Artificial Intelligence (XAI) techniques aim to address these issues. However, explainability can mean different things to people with different backgrounds, expertise, and goals. To address the target audience with diverse needs, we develop storytelling XAI. In this research, we have developed an approach that combines multi-task distillation with interpretability techniques to enable audience-centric explainability. Using multi-task distillation allows the model to exploit the relationships between tasks, potentially improving interpretability as each task supports the other leading to an enhanced interpretability from the perspective of a domain expert. The distillation process allows us to extend this research to large deep models that are highly complex. We focus on both model-agnostic and model-specific methods of interpretability, supported by textual justification of the results in healthcare through our use case. Our methods increase the trust of both the domain experts and the machine learning experts to enable a responsible AI.
Cooperative Learning with Gaussian Processes for Euler-Lagrange Systems Tracking Control under Switching Topologies
Feb 05, 2024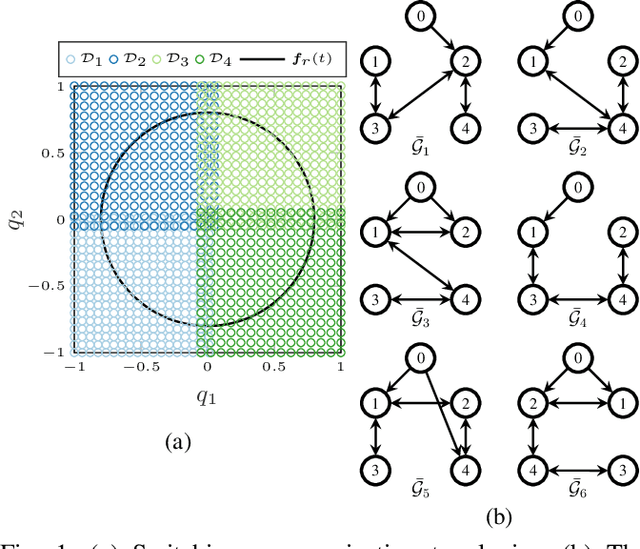
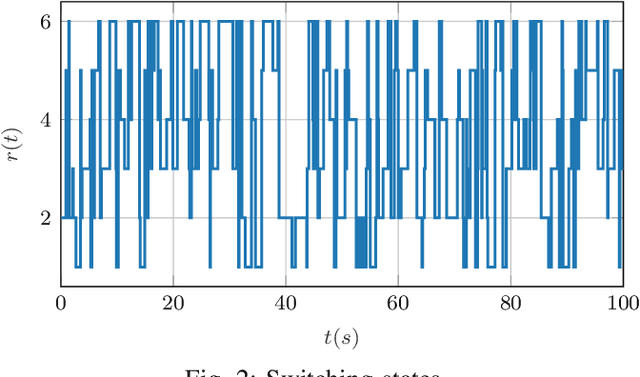
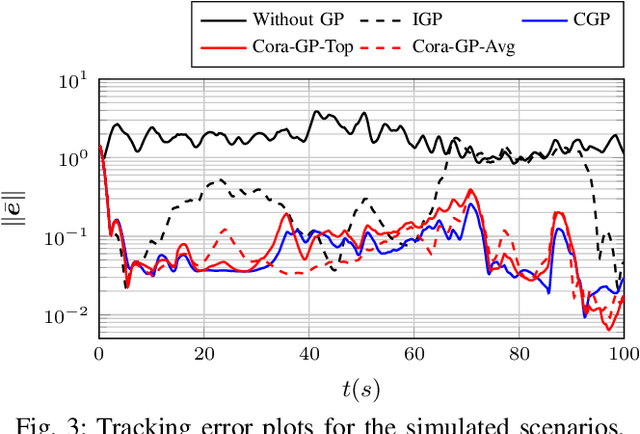
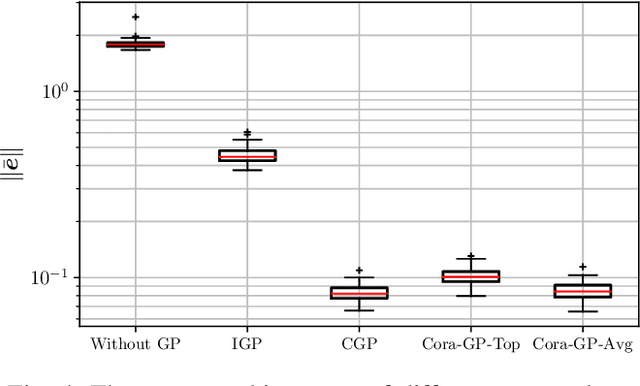
This work presents an innovative learning-based approach to tackle the tracking control problem of Euler-Lagrange multi-agent systems with partially unknown dynamics operating under switching communication topologies. The approach leverages a correlation-aware cooperative algorithm framework built upon Gaussian process regression, which adeptly captures inter-agent correlations for uncertainty predictions. A standout feature is its exceptional efficiency in deriving the aggregation weights achieved by circumventing the computationally intensive posterior variance calculations. Through Lyapunov stability analysis, the distributed control law ensures bounded tracking errors with high probability. Simulation experiments validate the protocol's efficacy in effectively managing complex scenarios, establishing it as a promising solution for robust tracking control in multi-agent systems characterized by uncertain dynamics and dynamic communication structures.
Decentralized Event-Triggered Online Learning for Safe Consensus of Multi-Agent Systems with Gaussian Process Regression
Feb 05, 2024Consensus control in multi-agent systems has received significant attention and practical implementation across various domains. However, managing consensus control under unknown dynamics remains a significant challenge for control design due to system uncertainties and environmental disturbances. This paper presents a novel learning-based distributed control law, augmented by an auxiliary dynamics. Gaussian processes are harnessed to compensate for the unknown components of the multi-agent system. For continuous enhancement in predictive performance of Gaussian process model, a data-efficient online learning strategy with a decentralized event-triggered mechanism is proposed. Furthermore, the control performance of the proposed approach is ensured via the Lyapunov theory, based on a probabilistic guarantee for prediction error bounds. To demonstrate the efficacy of the proposed learning-based controller, a comparative analysis is conducted, contrasting it with both conventional distributed control laws and offline learning methodologies.
Whom to Trust? Elective Learning for Distributed Gaussian Process Regression
Feb 05, 2024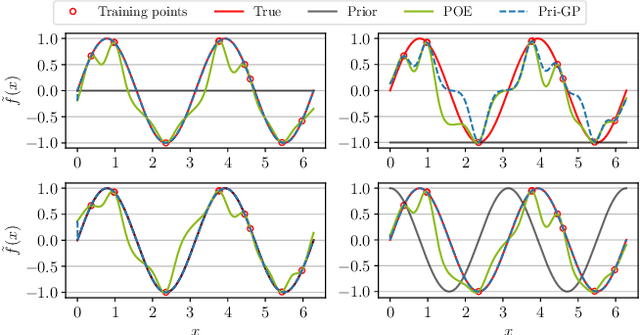
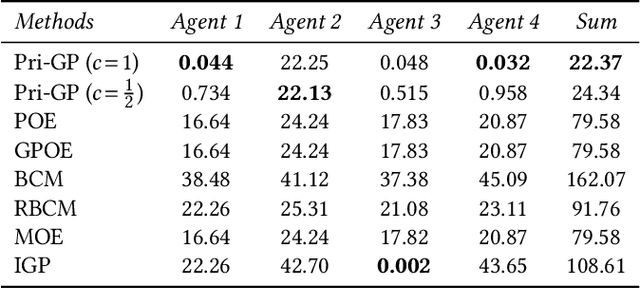
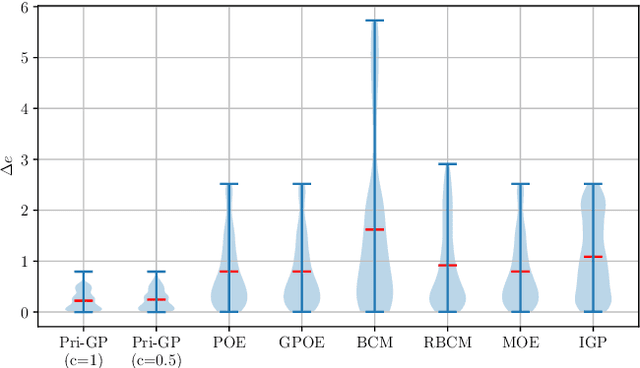
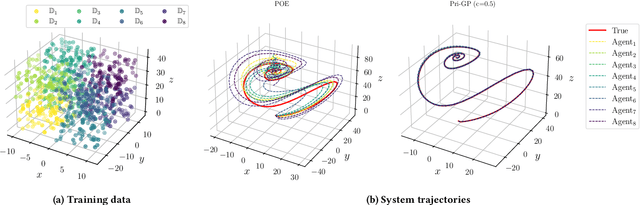
This paper introduces an innovative approach to enhance distributed cooperative learning using Gaussian process (GP) regression in multi-agent systems (MASs). The key contribution of this work is the development of an elective learning algorithm, namely prior-aware elective distributed GP (Pri-GP), which empowers agents with the capability to selectively request predictions from neighboring agents based on their trustworthiness. The proposed Pri-GP effectively improves individual prediction accuracy, especially in cases where the prior knowledge of an agent is incorrect. Moreover, it eliminates the need for computationally intensive variance calculations for determining aggregation weights in distributed GP. Furthermore, we establish a prediction error bound within the Pri-GP framework, ensuring the reliability of predictions, which is regarded as a crucial property in safety-critical MAS applications.
Learning-based Control for PMSM Using Distributed Gaussian Processes with Optimal Aggregation Strategy
Jul 26, 2023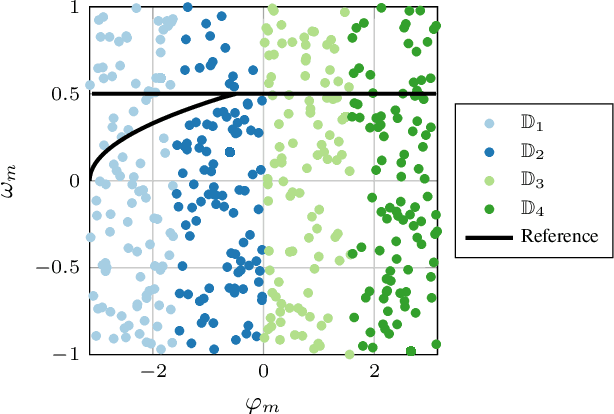
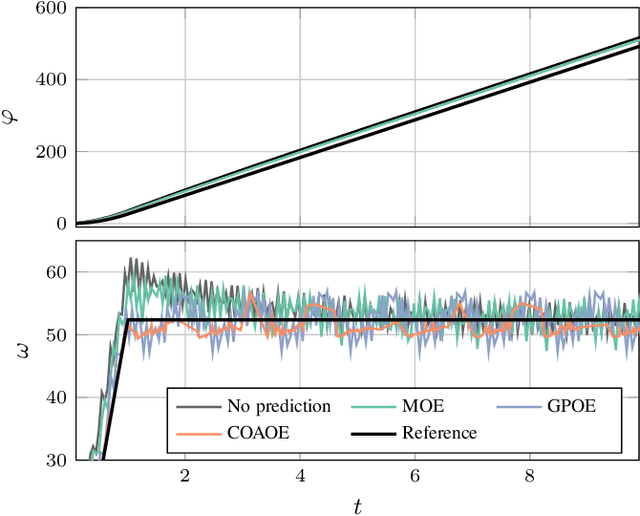
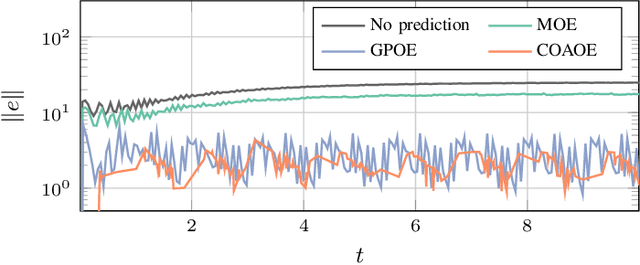
The growing demand for accurate control in varying and unknown environments has sparked a corresponding increase in the requirements for power supply components, including permanent magnet synchronous motors (PMSMs). To infer the unknown part of the system, machine learning techniques are widely employed, especially Gaussian process regression (GPR) due to its flexibility of continuous system modeling and its guaranteed performance. For practical implementation, distributed GPR is adopted to alleviate the high computational complexity. However, the study of distributed GPR from a control perspective remains an open problem. In this paper, a control-aware optimal aggregation strategy of distributed GPR for PMSMs is proposed based on the Lyapunov stability theory. This strategy exclusively leverages the posterior mean, thereby obviating the need for computationally intensive calculations associated with posterior variance in alternative approaches. Moreover, the straightforward calculation process of our proposed strategy lends itself to seamless implementation in high-frequency PMSM control. The effectiveness of the proposed strategy is demonstrated in the simulations.