 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAD-Flower: Flow Matching for Safe, Admissible, and Dynamically Consistent Planning
Nov 07, 2025Flow matching (FM) has shown promising results in data-driven planning. However, it inherently lacks formal guarantees for ensuring state and action constraints, whose satisfaction is a fundamental and crucial requirement for the safety and admissibility of planned trajectories on various systems. Moreover, existing FM planners do not ensure the dynamical consistency, which potentially renders trajectories inexecutable. We address these shortcomings by proposing SAD-Flower, a novel framework for generating Safe, Admissible, and Dynamically consistent trajectories. Our approach relies on an augmentation of the flow with a virtual control input. Thereby, principled guidance can be derived using techniques from nonlinear control theory, providing formal guarantees for state constraints, action constraints, and dynamic consistency. Crucially, SAD-Flower operates without retraining, enabling test-time satisfaction of unseen constraints. Through extensive experiments across several tasks, we demonstrate that SAD-Flower outperforms various generative-model-based baselines in ensuring constraint satisfaction.
Prompt2Auto: From Motion Prompt to Automated Control via Geometry-Invariant One-Shot Gaussian Process Learning
Sep 17, 2025Learning from demonstration allows robots to acquire complex skills from human demonstrations, but conventional approaches often require large datasets and fail to generalize across coordinate transformations. In this paper, we propose Prompt2Auto, a geometry-invariant one-shot Gaussian process (GeoGP) learning framework that enables robots to perform human-guided automated control from a single motion prompt. A dataset-construction strategy based on coordinate transformations is introduced that enforces invariance to translation, rotation, and scaling, while supporting multi-step predictions. Moreover, GeoGP is robust to variations in the user's motion prompt and supports multi-skill autonomy. We validate the proposed approach through numerical simulations with the designed user graphical interface and two real-world robotic experiments, which demonstrate that the proposed method is effective, generalizes across tasks, and significantly reduces the demonstration burden. Project page is available at: https://prompt2auto.github.io
Safe Flow Matching: Robot Motion Planning with Control Barrier Functions
Apr 11, 2025Recent advances in generative modeling have led to promising results in robot motion planning, particularly through diffusion and flow-based models that capture complex, multimodal trajectory distributions. However, these methods are typically trained offline and remain limited when faced with unseen environments or dynamic constraints, often lacking explicit mechanisms to ensure safety during deployment. In this work, we propose, Safe Flow Matching (SafeFM), a motion planning approach for trajectory generation that integrates flow matching with safety guarantees. By incorporating the proposed flow matching barrier functions, SafeFM ensures that generated trajectories remain within safe regions throughout the planning horizon, even in the presence of previously unseen obstacles or state-action constraints. Unlike diffusion-based approaches, our method allows for direct, efficient sampling of constraint-satisfying trajectories, making it well-suited for real-time motion planning. We evaluate SafeFM on a diverse set of tasks, including planar robot navigation and 7-DoF manipulation, demonstrating superior safety, generalization, and planning performance compared to state-of-the-art generative planners. Comprehensive resources are available on the project website: https://safeflowmatching.github.io/SafeFM/
GPgym: A Remote Service Platform with Gaussian Process Regression for Online Learning
Dec 17, 2024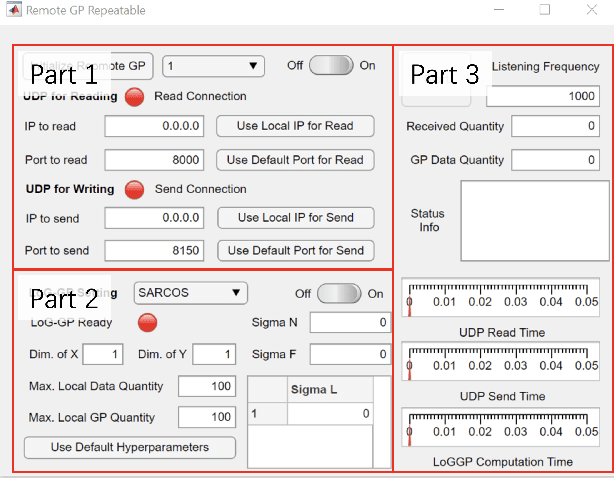
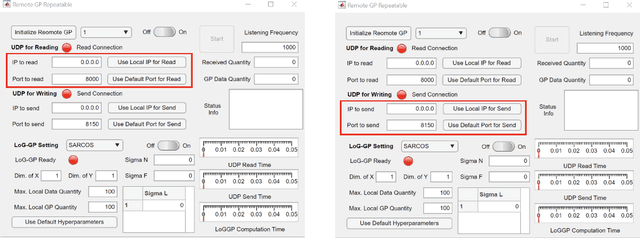
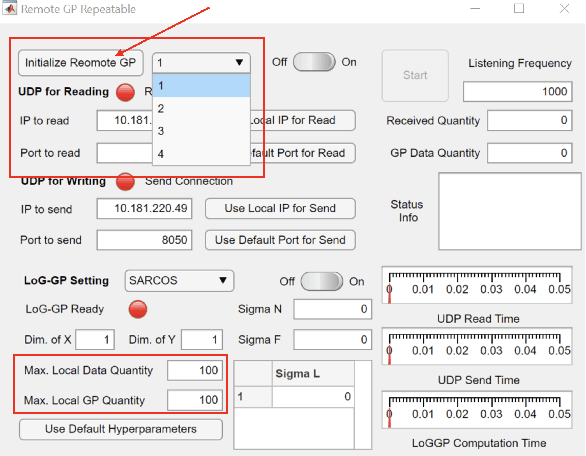

Machine learning is now widely applied across various domains, including industry, engineering, and research. While numerous mature machine learning models have been open-sourced on platforms like GitHub, their deployment often requires writing scripts in specific programming languages, such as Python, C++, or MATLAB. This dependency on particular languages creates a barrier for professionals outside the field of machine learning, making it challenging to integrate these algorithms into their workflows. To address this limitation, we propose GPgym, a remote service node based on Gaussian process regression. GPgym enables experts from diverse fields to seamlessly and flexibly incorporate machine learning techniques into their existing specialized software, without needing to write or manage complex script code.
Asynchronous Distributed Gaussian Process Regression for Online Learning and Dynamical Systems: Complementary Document
Dec 16, 2024



This is a complementary document for the paper titled "Asynchronous Distributed Gaussian Process Regression for Online Learning and Dynamical Systems".
Whom to Trust? Elective Learning for Distributed Gaussian Process Regression
Feb 05, 2024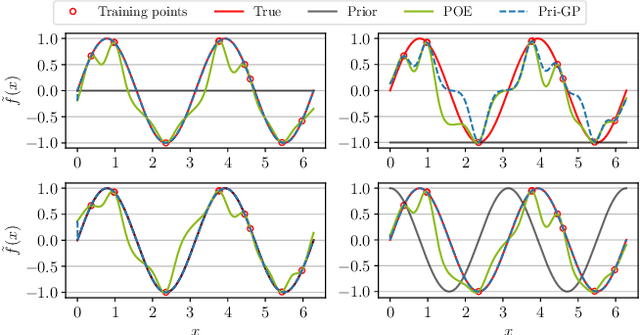
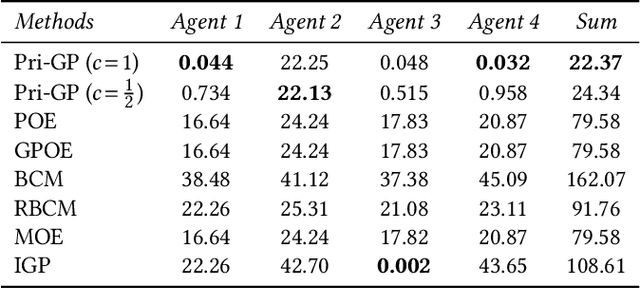
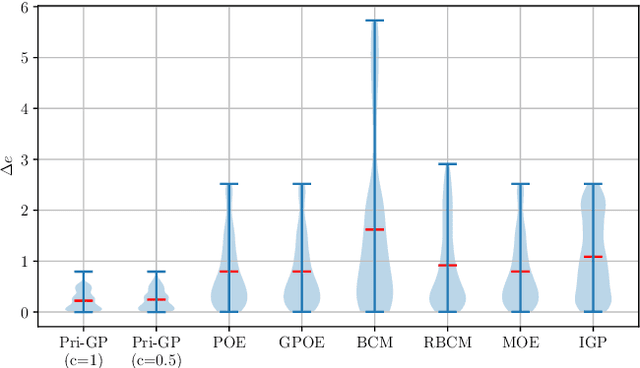
This paper introduces an innovative approach to enhance distributed cooperative learning using Gaussian process (GP) regression in multi-agent systems (MASs). The key contribution of this work is the development of an elective learning algorithm, namely prior-aware elective distributed GP (Pri-GP), which empowers agents with the capability to selectively request predictions from neighboring agents based on their trustworthiness. The proposed Pri-GP effectively improves individual prediction accuracy, especially in cases where the prior knowledge of an agent is incorrect. Moreover, it eliminates the need for computationally intensive variance calculations for determining aggregation weights in distributed GP. Furthermore, we establish a prediction error bound within the Pri-GP framework, ensuring the reliability of predictions, which is regarded as a crucial property in safety-critical MAS applications.
Cooperative Learning with Gaussian Processes for Euler-Lagrange Systems Tracking Control under Switching Topologies
Feb 05, 2024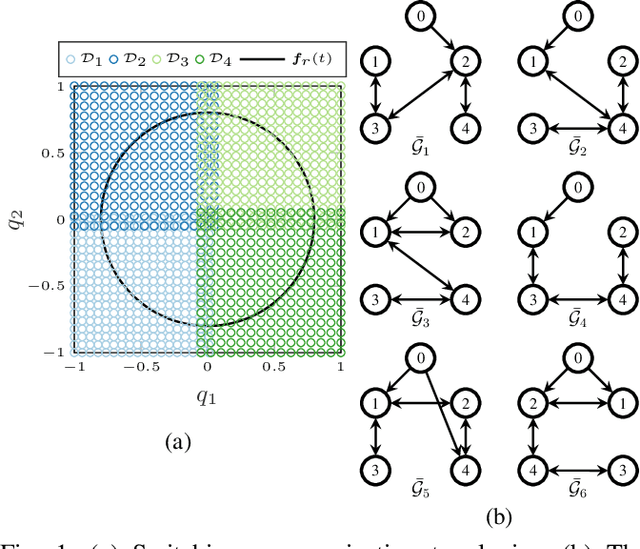
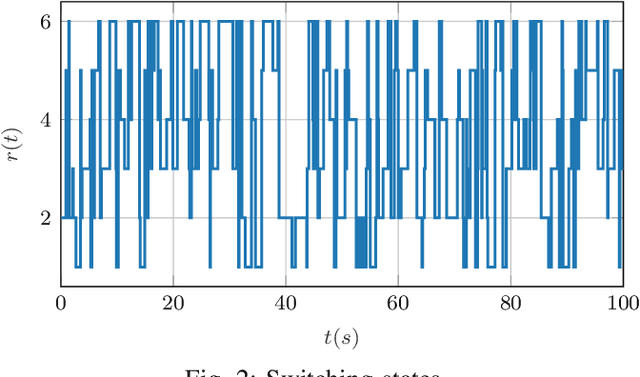
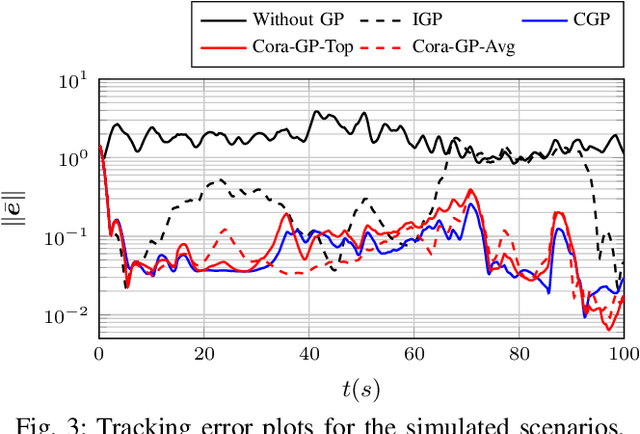
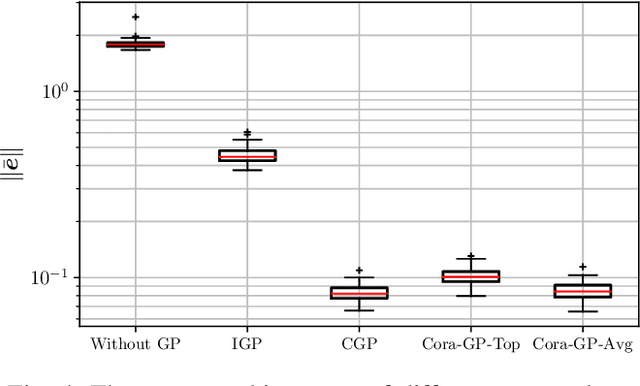
This work presents an innovative learning-based approach to tackle the tracking control problem of Euler-Lagrange multi-agent systems with partially unknown dynamics operating under switching communication topologies. The approach leverages a correlation-aware cooperative algorithm framework built upon Gaussian process regression, which adeptly captures inter-agent correlations for uncertainty predictions. A standout feature is its exceptional efficiency in deriving the aggregation weights achieved by circumventing the computationally intensive posterior variance calculations. Through Lyapunov stability analysis, the distributed control law ensures bounded tracking errors with high probability. Simulation experiments validate the protocol's efficacy in effectively managing complex scenarios, establishing it as a promising solution for robust tracking control in multi-agent systems characterized by uncertain dynamics and dynamic communication structures.
Decentralized Event-Triggered Online Learning for Safe Consensus of Multi-Agent Systems with Gaussian Process Regression
Feb 05, 2024Consensus control in multi-agent systems has received significant attention and practical implementation across various domains. However, managing consensus control under unknown dynamics remains a significant challenge for control design due to system uncertainties and environmental disturbances. This paper presents a novel learning-based distributed control law, augmented by an auxiliary dynamics. Gaussian processes are harnessed to compensate for the unknown components of the multi-agent system. For continuous enhancement in predictive performance of Gaussian process model, a data-efficient online learning strategy with a decentralized event-triggered mechanism is proposed. Furthermore, the control performance of the proposed approach is ensured via the Lyapunov theory, based on a probabilistic guarantee for prediction error bounds. To demonstrate the efficacy of the proposed learning-based controller, a comparative analysis is conducted, contrasting it with both conventional distributed control laws and offline learning methodologies.
Learning-based Control for PMSM Using Distributed Gaussian Processes with Optimal Aggregation Strategy
Jul 26, 2023
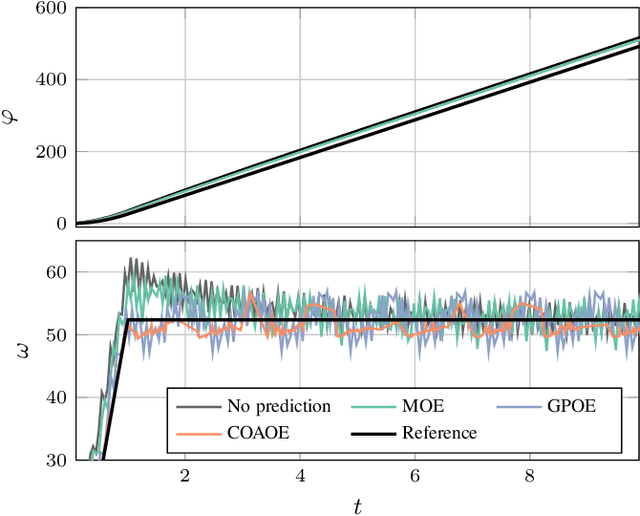
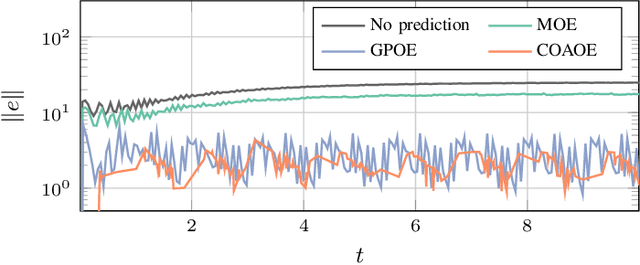
The growing demand for accurate control in varying and unknown environments has sparked a corresponding increase in the requirements for power supply components, including permanent magnet synchronous motors (PMSMs). To infer the unknown part of the system, machine learning techniques are widely employed, especially Gaussian process regression (GPR) due to its flexibility of continuous system modeling and its guaranteed performance. For practical implementation, distributed GPR is adopted to alleviate the high computational complexity. However, the study of distributed GPR from a control perspective remains an open problem. In this paper, a control-aware optimal aggregation strategy of distributed GPR for PMSMs is proposed based on the Lyapunov stability theory. This strategy exclusively leverages the posterior mean, thereby obviating the need for computationally intensive calculations associated with posterior variance in alternative approaches. Moreover, the straightforward calculation process of our proposed strategy lends itself to seamless implementation in high-frequency PMSM control. The effectiveness of the proposed strategy is demonstrated in the simulations.
Can Learning Deteriorate Control? Analyzing Computational Delays in Gaussian Process-Based Event-Triggered Online Learning
May 14, 2023When the dynamics of systems are unknown, supervised machine learning techniques are commonly employed to infer models from data. Gaussian process (GP) regression is a particularly popular learning method for this purpose due to the existence of prediction error bounds. Moreover, GP models can be efficiently updated online, such that event-triggered online learning strategies can be pursued to ensure specified tracking accuracies. However, existing trigger conditions must be able to be evaluated at arbitrary times, which cannot be achieved in practice due to non-negligible computation times. Therefore, we first derive a delay-aware tracking error bound, which reveals an accuracy-delay trade-off. Based on this result, we propose a novel event trigger for GP-based online learning with computational delays, which we show to offer advantages over offline trained GP models for sufficiently small computation times. Finally, we demonstrate the effectiveness of the proposed event trigger for online learning in simulations.