 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Coverage Control of Constrained Constant-Speed Unicycle Multi-Agent Systems
Apr 12, 2023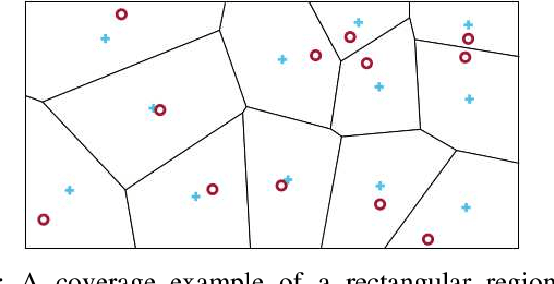
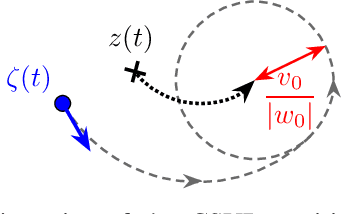
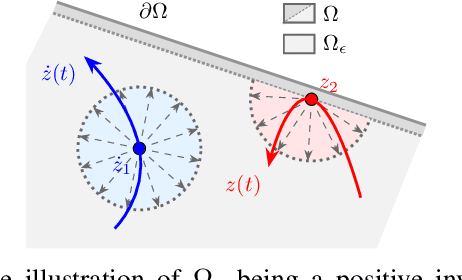
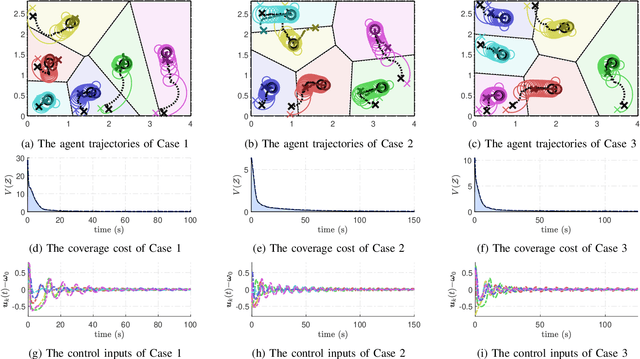
This paper proposes a novel distributed coverage controller for a multi-agent system with constant-speed unicycle robots (CSUR). The work is motivated by the limitation of the conventional method that does not ensure the satisfaction of hard state- and input-dependent constraints and leads to feasibility issues for multi-CSUR systems. In this paper, we solve these problems by designing a novel coverage cost function and a saturated gradient-search-based control law. Invariant set theory and Lyapunov-based techniques are used to prove the state-dependent confinement and the convergence of the system state to the optimal coverage configuration, respectively. The controller is implemented in a distributed manner based on a novel communication standard among the agents. A series of simulation case studies are conducted to validate the effectiveness of the proposed coverage controller in different initial conditions and with control parameters. A comparison study in simulation reveals the advantage of the proposed method in terms of avoiding infeasibility. The experiment study verifies the applicability of the method to real robots with uncertainties. The development procedure of the method from theoretical analysis to experimental validation provides a novel framework for multi-agent system coordinate control with complex agent dynamics.
FedXGBoost: Privacy-Preserving XGBoost for Federated Learning
Jun 22, 2021
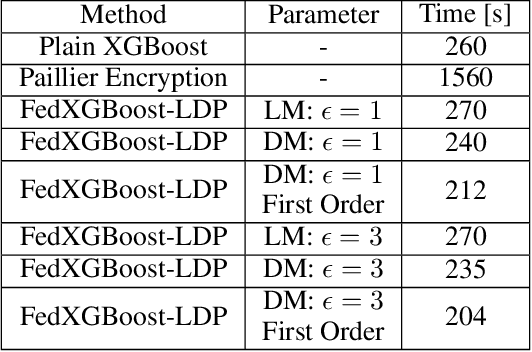


Federated learning is the distributed machine learning framework that enables collaborative training across multiple parties while ensuring data privacy. Practical adaptation of XGBoost, the state-of-the-art tree boosting framework, to federated learning remains limited due to high cost incurred by conventional privacy-preserving methods. To address the problem, we propose two variants of federated XGBoost with privacy guarantee: FedXGBoost-SMM and FedXGBoost-LDP. Our first protocol FedXGBoost-SMM deploys enhanced secure matrix multiplication method to preserve privacy with lossless accuracy and lower overhead than encryption-based techniques. Developed independently, the second protocol FedXGBoost-LDP is heuristically designed with noise perturbation for local differential privacy, and empirically evaluated on real-world and synthetic datasets.