 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Loss Functions for Neuro-Symbolic Structured Prediction
May 12, 2024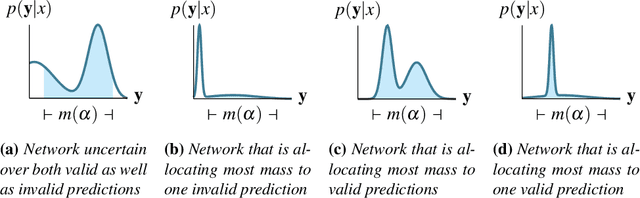
Structured output prediction problems are ubiquitous in machine learning. The prominent approach leverages neural networks as powerful feature extractors, otherwise assuming the independence of the outputs. These outputs, however, jointly encode an object, e.g. a path in a graph, and are therefore related through the structure underlying the output space. We discuss the semantic loss, which injects knowledge about such structure, defined symbolically, into training by minimizing the network's violation of such dependencies, steering the network towards predicting distributions satisfying the underlying structure. At the same time, it is agnostic to the arrangement of the symbols, and depends only on the semantics expressed thereby, while also enabling efficient end-to-end training and inference. We also discuss key improvements and applications of the semantic loss. One limitations of the semantic loss is that it does not exploit the association of every data point with certain features certifying its membership in a target class. We should therefore prefer minimum-entropy distributions over valid structures, which we obtain by additionally minimizing the neuro-symbolic entropy. We empirically demonstrate the benefits of this more refined formulation. Moreover, the semantic loss is designed to be modular and can be combined with both discriminative and generative neural models. This is illustrated by integrating it into generative adversarial networks, yielding constrained adversarial networks, a novel class of deep generative models able to efficiently synthesize complex objects obeying the structure of the underlying domain.
Click to Move: Controlling Video Generation with Sparse Motion
Aug 19, 2021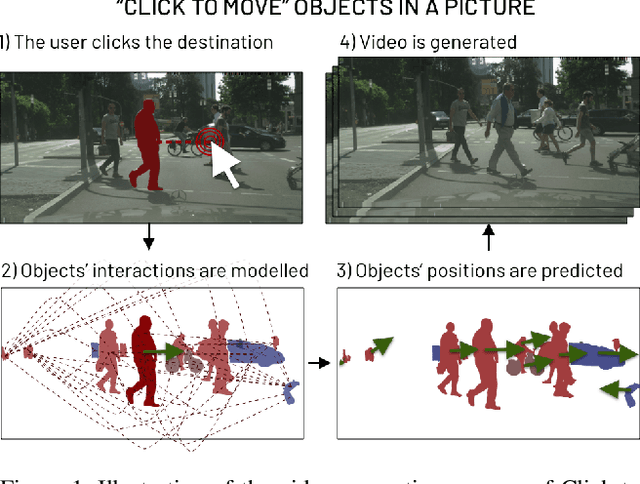
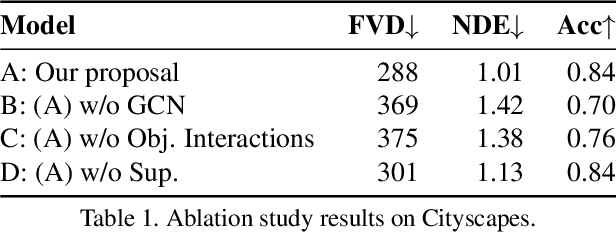
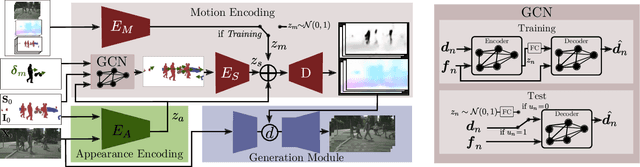
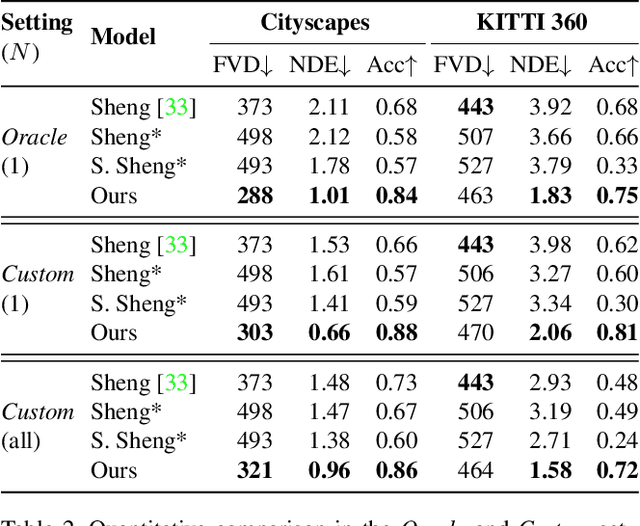
This paper introduces Click to Move (C2M), a novel framework for video generation where the user can control the motion of the synthesized video through mouse clicks specifying simple object trajectories of the key objects in the scene. Our model receives as input an initial frame, its corresponding segmentation map and the sparse motion vectors encoding the input provided by the user. It outputs a plausible video sequence starting from the given frame and with a motion that is consistent with user input. Notably, our proposed deep architecture incorporates a Graph Convolution Network (GCN) modelling the movements of all the objects in the scene in a holistic manner and effectively combining the sparse user motion information and image features. Experimental results show that C2M outperforms existing methods on two publicly available datasets, thus demonstrating the effectiveness of our GCN framework at modelling object interactions. The source code is publicly available at https://github.com/PierfrancescoArdino/C2M.
Semantic-Guided Inpainting Network for Complex Urban Scenes Manipulation
Oct 19, 2020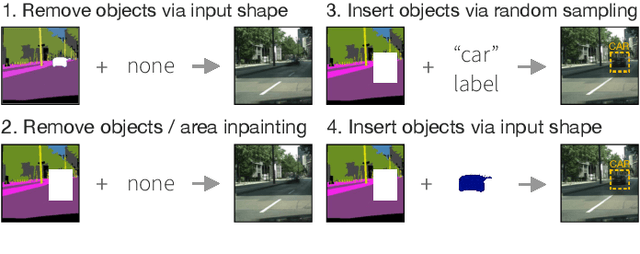
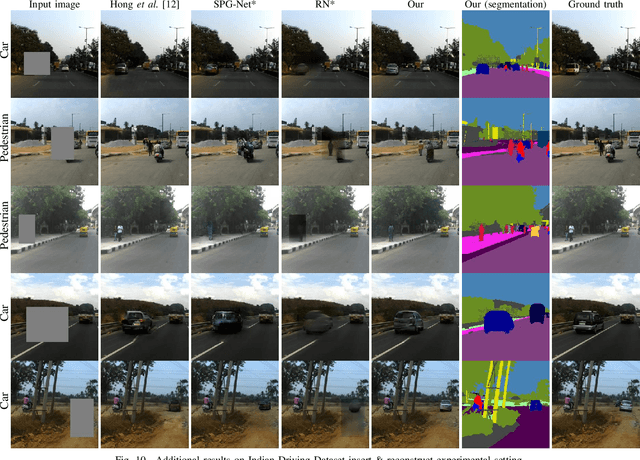
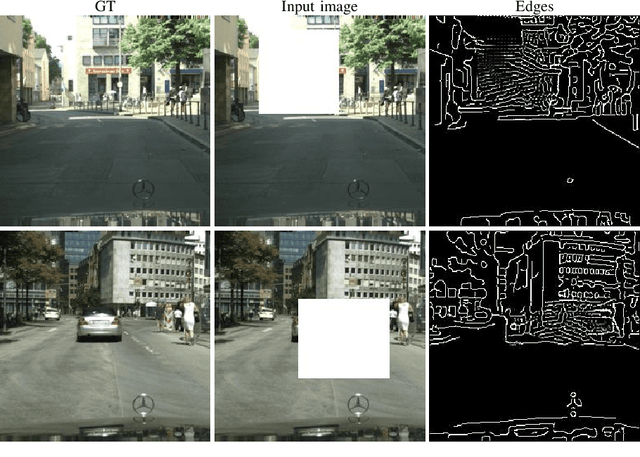
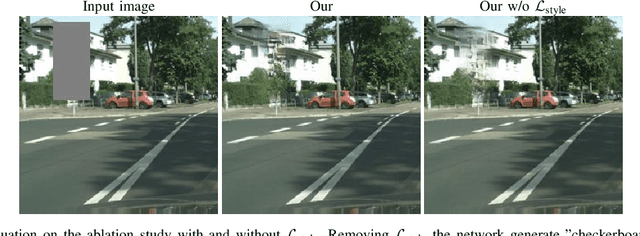
Manipulating images of complex scenes to reconstruct, insert and/or remove specific object instances is a challenging task. Complex scenes contain multiple semantics and objects, which are frequently cluttered or ambiguous, thus hampering the performance of inpainting models. Conventional techniques often rely on structural information such as object contours in multi-stage approaches that generate unreliable results and boundaries. In this work, we propose a novel deep learning model to alter a complex urban scene by removing a user-specified portion of the image and coherently inserting a new object (e.g. car or pedestrian) in that scene. Inspired by recent works on image inpainting, our proposed method leverages the semantic segmentation to model the content and structure of the image, and learn the best shape and location of the object to insert. To generate reliable results, we design a new decoder block that combines the semantic segmentation and generation task to guide better the generation of new objects and scenes, which have to be semantically consistent with the image. Our experiments, conducted on two large-scale datasets of urban scenes (Cityscapes and Indian Driving), show that our proposed approach successfully address the problem of semantically-guided inpainting of complex urban scene.
Efficient Generation of Structured Objects with Constrained Adversarial Networks
Jul 26, 2020


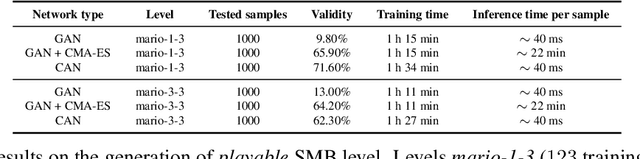
Generative Adversarial Networks (GANs) struggle to generate structured objects like molecules and game maps. The issue is that structured objects must satisfy hard requirements (e.g., molecules must be chemically valid) that are difficult to acquire from examples alone. As a remedy, we propose Constrained Adversarial Networks (CANs), an extension of GANs in which the constraints are embedded into the model during training. This is achieved by penalizing the generator proportionally to the mass it allocates to invalid structures. In contrast to other generative models, CANs support efficient inference of valid structures (with high probability) and allows to turn on and off the learned constraints at inference time. CANs handle arbitrary logical constraints and leverage knowledge compilation techniques to efficiently evaluate the disagreement between the model and the constraints. Our setup is further extended to hybrid logical-neural constraints for capturing very complex constraints, like graph reachability. An extensive empirical analysis shows that CANs efficiently generate valid structures that are both high-quality and novel.