 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowd-FM: Learned Optimal Selection of Conditional Flow Matching-generated Trajectories for Crowd Navigation
Feb 06, 2026Safe and computationally efficient local planning for mobile robots in dense, unstructured human crowds remains a fundamental challenge. Moreover, ensuring that robot trajectories are similar to how a human moves will increase the acceptance of the robot in human environments. In this paper, we present Crowd-FM, a learning-based approach to address both safety and human-likeness challenges. Our approach has two novel components. First, we train a Conditional Flow-Matching (CFM) policy over a dataset of optimally controlled trajectories to learn a set of collision-free primitives that a robot can choose at any given scenario. The chosen optimal control solver can generate multi-modal collision-free trajectories, allowing the CFM policy to learn a diverse set of maneuvers. Secondly, we learn a score function over a dataset of human demonstration trajectories that provides a human-likeness score for the flow primitives. At inference time, computing the optimal trajectory requires selecting the one with the highest score. Our approach improves the state-of-the-art by showing that our CFM policy alone can produce collision-free navigation with a higher success rate than existing learning-based baselines. Furthermore, when augmented with inference-time refinement, our approach can outperform even expensive optimisation-based planning approaches. Finally, we validate that our scoring network can select trajectories closer to the expert data than a manually designed cost function.
How Human Motion Prediction Quality Shapes Social Robot Navigation Performance in Constrained Spaces
Jan 14, 2026Motivated by the vision of integrating mobile robots closer to humans in warehouses, hospitals, manufacturing plants, and the home, we focus on robot navigation in dynamic and spatially constrained environments. Ensuring human safety, comfort, and efficiency in such settings requires that robots are endowed with a model of how humans move around them. Human motion prediction around robots is especially challenging due to the stochasticity of human behavior, differences in user preferences, and data scarcity. In this work, we perform a methodical investigation of the effects of human motion prediction quality on robot navigation performance, as well as human productivity and impressions. We design a scenario involving robot navigation among two human subjects in a constrained workspace and instantiate it in a user study ($N=80$) involving two different robot platforms, conducted across two sites from different world regions. Key findings include evidence that: 1) the widely adopted average displacement error is not a reliable predictor of robot navigation performance and human impressions; 2) the common assumption of human cooperation breaks down in constrained environments, with users often not reciprocating robot cooperation, and causing performance degradations; 3) more efficient robot navigation often comes at the expense of human efficiency and comfort.
A Survey on Socially Aware Robot Navigation: Taxonomy and Future Challenges
Nov 18, 2023Socially aware robot navigation is gaining popularity with the increase in delivery and assistive robots. The research is further fueled by a need for socially aware navigation skills in autonomous vehicles to move safely and appropriately in spaces shared with humans. Although most of these are ground robots, drones are also entering the field. In this paper, we present a literature survey of the works on socially aware robot navigation in the past 10 years. We propose four different faceted taxonomies to navigate the literature and examine the field from four different perspectives. Through the taxonomic review, we discuss the current research directions and the extending scope of applications in various domains. Further, we put forward a list of current research opportunities and present a discussion on possible future challenges that are likely to emerge in the field.
Principles and Guidelines for Evaluating Social Robot Navigation Algorithms
Jun 29, 2023



A major challenge to deploying robots widely is navigation in human-populated environments, commonly referred to as social robot navigation. While the field of social navigation has advanced tremendously in recent years, the fair evaluation of algorithms that tackle social navigation remains hard because it involves not just robotic agents moving in static environments but also dynamic human agents and their perceptions of the appropriateness of robot behavior. In contrast, clear, repeatable, and accessible benchmarks have accelerated progress in fields like computer vision, natural language processing and traditional robot navigation by enabling researchers to fairly compare algorithms, revealing limitations of existing solutions and illuminating promising new directions. We believe the same approach can benefit social navigation. In this paper, we pave the road towards common, widely accessible, and repeatable benchmarking criteria to evaluate social robot navigation. Our contributions include (a) a definition of a socially navigating robot as one that respects the principles of safety, comfort, legibility, politeness, social competency, agent understanding, proactivity, and responsiveness to context, (b) guidelines for the use of metrics, development of scenarios, benchmarks, datasets, and simulators to evaluate social navigation, and (c) a design of a social navigation metrics framework to make it easier to compare results from different simulators, robots and datasets.
Watch out! There may be a Human. Addressing Invisible Humans in Social Navigation
Nov 22, 2022
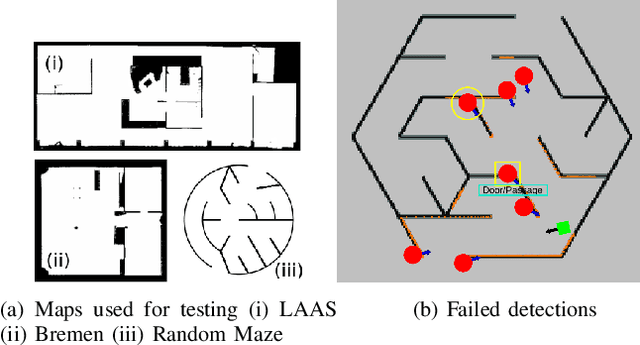

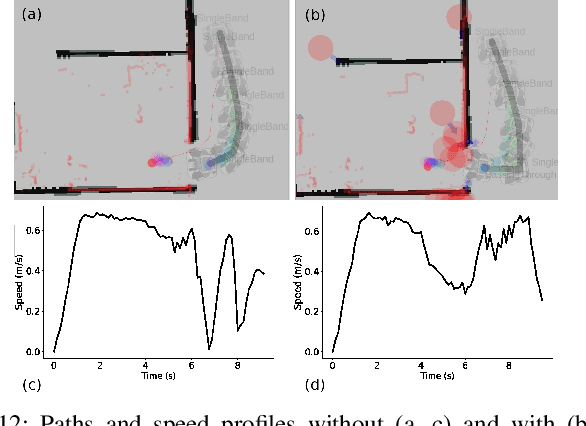
Current approaches in human-aware or social robot navigation address the humans that are visible to the robot. However, it is also important to address the possible emergences of humans to avoid shocks or surprises to humans and erratic behavior of the robot planner. In this paper, we propose a novel approach to detect and address these human emergences called `invisible humans'. We determine the places from which a human, currently not visible to the robot, can appear suddenly and then adapt the path and speed of the robot with the anticipation of potential collisions. This is done while still considering and adapting humans present in the robot's field of view. We also show how this detection can be exploited to identify and address the doorways or narrow passages. Finally, the effectiveness of the proposed methodology is shown through several simulated and real-world experiments.