 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Loco: Unifying Multi-Embodiment Legged Locomotion via Reinforcement Learning Augmented Diffusion
Jun 13, 2025Generalizing locomotion policies across diverse legged robots with varying morphologies is a key challenge due to differences in observation/action dimensions and system dynamics. In this work, we propose Multi-Loco, a novel unified framework combining a morphology-agnostic generative diffusion model with a lightweight residual policy optimized via reinforcement learning (RL). The diffusion model captures morphology-invariant locomotion patterns from diverse cross-embodiment datasets, improving generalization and robustness. The residual policy is shared across all embodiments and refines the actions generated by the diffusion model, enhancing task-aware performance and robustness for real-world deployment. We evaluated our method with a rich library of four legged robots in both simulation and real-world experiments. Compared to a standard RL framework with PPO, our approach -- replacing the Gaussian policy with a diffusion model and residual term -- achieves a 10.35% average return improvement, with gains up to 13.57% in wheeled-biped locomotion tasks. These results highlight the benefits of cross-embodiment data and composite generative architectures in learning robust, generalized locomotion skills.
Simultaneous Locomotion Mode Classification and Continuous Gait Phase Estimation for Transtibial Prostheses
Nov 12, 2024



Recognizing and identifying human locomotion is a critical step to ensuring fluent control of wearable robots, such as transtibial prostheses. In particular, classifying the intended locomotion mode and estimating the gait phase are key. In this work, a novel, interpretable, and computationally efficient algorithm is presented for simultaneously predicting locomotion mode and gait phase. Using able-bodied (AB) and transtibial prosthesis (PR) data, seven locomotion modes are tested including slow, medium, and fast level walking (0.6, 0.8, and 1.0 m/s), ramp ascent/descent (5 degrees), and stair ascent/descent (20 cm height). Overall classification accuracy was 99.1$\%$ and 99.3$\%$ for the AB and PR conditions, respectively. The average gait phase error across all data was less than 4$\%$. Exploiting the structure of the data, computational efficiency reached 2.91 $\mu$s per time step. The time complexity of this algorithm scales as $O(N\cdot M)$ with the number of locomotion modes $M$ and samples per gait cycle $N$. This efficiency and high accuracy could accommodate a much larger set of locomotion modes ($\sim$ 700 on Open-Source Leg Prosthesis) to handle the wide range of activities pursued by individuals during daily living.
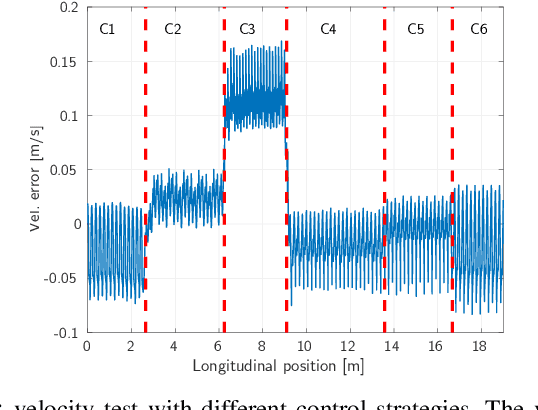
Task-Space Riccati Feedback based Whole Body Control for Underactuated Legged Locomotion
Mar 31, 2024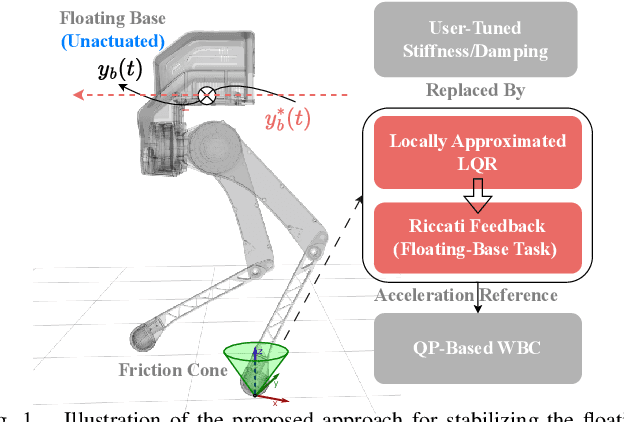

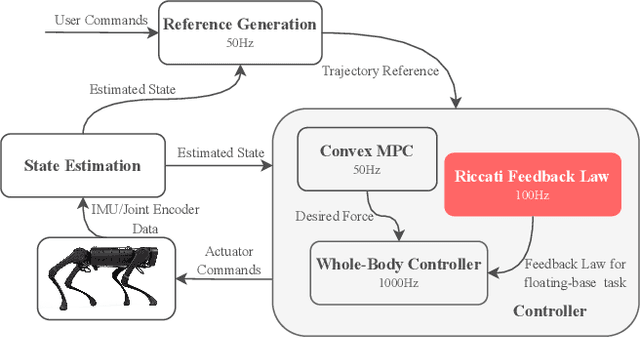

This manuscript primarily aims to enhance the performance of whole-body controllers(WBC) for underactuated legged locomotion. We introduce a systematic parameter design mechanism for the floating-base feedback control within the WBC. The proposed approach involves utilizing the linearized model of unactuated dynamics to formulate a Linear Quadratic Regulator(LQR) and solving a Riccati gain while accounting for potential physical constraints through a second-order approximation of the log-barrier function. And then the user-tuned feedback gain for the floating base task is replaced by a new one constructed from the solved Riccati gain. Extensive simulations conducted in MuJoCo with a point bipedal robot, as well as real-world experiments performed on a quadruped robot, demonstrate the effectiveness of the proposed method. In the different bipedal locomotion tasks, compared with the user-tuned method, the proposed approach is at least 12% better and up to 50% better at linear velocity tracking, and at least 7% better and up to 47% better at angular velocity tracking. In the quadruped experiment, linear velocity tracking is improved by at least 3% and angular velocity tracking is improved by at least 23% using the proposed method.
Towards Continuous Time Finite Horizon LQR Control in SE(3)
Jul 26, 2023The control of free-floating robots requires dealing with several challenges. The motion of such robots evolves on a continuous manifold described by the Special Euclidean Group of dimension 3, known as SE(3). Methods from finite horizon Linear Quadratic Regulators (LQR) control have gained recent traction in the robotics community. However, such approaches are inherently solving an unconstrained optimization problem and hence are unable to respect the manifold constraints imposed by the group structure of SE(3). This may lead to small errors, singularity problems and double cover issues depending on the choice of coordinates to model the floating base motion. In this paper, we propose the use of canonical exponential coordinates of SE(3) and the associated Exponential map along with its differentials to embed this structure in the theory of finite horizon LQR controllers.
Whole-Body Dynamic Telelocomotion: A Step-to-Step Dynamics Approach to Human Walking Reference Generation
Jul 21, 2023Teleoperated humanoid robots hold significant potential as physical avatars for humans in hazardous and inaccessible environments, with the goal of channeling human intelligence and sensorimotor skills through these robotic counterparts. Precise coordination between humans and robots is crucial for accomplishing whole-body behaviors involving locomotion and manipulation. To progress successfully, dynamic synchronization between humans and humanoid robots must be achieved. This work enhances advancements in whole-body dynamic telelocomotion, addressing challenges in robustness. By embedding the hybrid and underactuated nature of bipedal walking into a virtual human walking interface, we achieve dynamically consistent walking gait generation. Additionally, we integrate a reactive robot controller into a whole-body dynamic telelocomotion framework. Thus, allowing the realization of telelocomotion behaviors on the full-body dynamics of a bipedal robot. Real-time telelocomotion simulation experiments validate the effectiveness of our methods, demonstrating that a trained human pilot can dynamically synchronize with a simulated bipedal robot, achieving sustained locomotion, controlling walking speeds within the range of 0.0 m/s to 0.3 m/s, and enabling backward walking for distances of up to 2.0 m. This research contributes to advancing teleoperated humanoid robots and paves the way for future developments in synchronized locomotion between humans and bipedal robots.
MPC-based Controller with Terrain Insight for Dynamic Legged Locomotion
Sep 30, 2019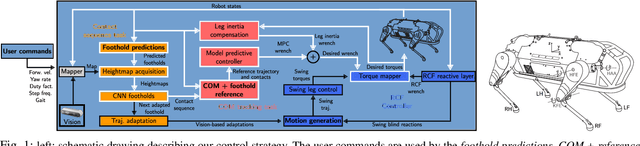

We present a novel control strategy for dynamic legged locomotion in complex scenarios, that considers information about the morphology of the terrain in contexts when only on-board mapping and computation are available. The strategy is built on top of two main elements: first a contact sequence task that provides safe foothold locations based on a convolutional neural network to perform fast and continuous evaluation of the terrain in search of safe foothold locations; then a model predictive controller that considers the foothold locations given by the contact sequence task to optimize target ground reaction forces. We assess the performance of our strategy through simulations of the hydraulically actuated quadruped robot HyQReal traversing rough terrain under realistic on-board sensing and computing conditions.