 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Space Riccati Feedback based Whole Body Control for Underactuated Legged Locomotion
Mar 31, 2024This manuscript primarily aims to enhance the performance of whole-body controllers(WBC) for underactuated legged locomotion. We introduce a systematic parameter design mechanism for the floating-base feedback control within the WBC. The proposed approach involves utilizing the linearized model of unactuated dynamics to formulate a Linear Quadratic Regulator(LQR) and solving a Riccati gain while accounting for potential physical constraints through a second-order approximation of the log-barrier function. And then the user-tuned feedback gain for the floating base task is replaced by a new one constructed from the solved Riccati gain. Extensive simulations conducted in MuJoCo with a point bipedal robot, as well as real-world experiments performed on a quadruped robot, demonstrate the effectiveness of the proposed method. In the different bipedal locomotion tasks, compared with the user-tuned method, the proposed approach is at least 12% better and up to 50% better at linear velocity tracking, and at least 7% better and up to 47% better at angular velocity tracking. In the quadruped experiment, linear velocity tracking is improved by at least 3% and angular velocity tracking is improved by at least 23% using the proposed method.
Quadruped Capturability and Push Recovery via a Switched-Systems Characterization of Dynamic Balance
Feb 17, 2022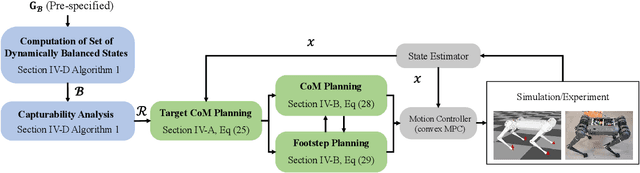

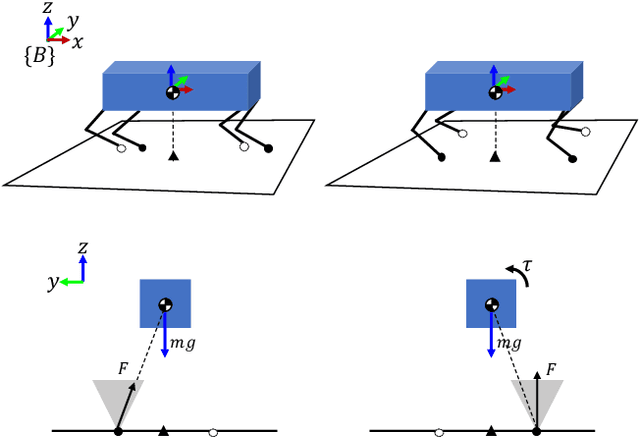
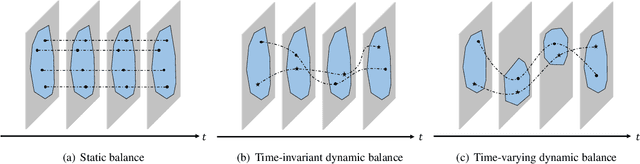
This paper studies capturability and push recovery for quadrupedal locomotion. Despite the rich literature on capturability analysis and push recovery control for legged robots, existing tools are developed mainly for bipeds or humanoids. Distinct quadrupedal features such as point contacts and multiple swinging legs prevent direct application of these methods. To address this gap, we propose a switched systems model for quadruped dynamics, and instantiate the abstract viability concept for quadrupedal locomotion with a time-based gait. Capturability is characterized through a novel specification of dynamically balanced states that addresses the time-varying nature of quadrupedal locomotion and balance. A linear inverted pendulum (LIP) model is adopted to demonstrate the theory and show how the newly developed quadrupedal capturability can be used in motion planning for quadrupedal push recovery. We formulate and solve an explicit model predictive control (EMPC) problem whose optimal solution fully characterizes quadrupedal capturability with the LIP. Given this analysis, an optimization-based planning scheme is devised for determining footsteps and center of mass references during push recovery. To validate the effectiveness of the overall framework, we conduct numerous simulation and hardware experiments. Simulation results illustrate the necessity of considering dynamic balance for quadrupedal capturability, and the significant improvement in disturbance rejection with the proposed strategy. Experimental validations on a replica of the Mini Cheetah quadruped demonstrate an up to 100% improvement as compared with state-of-the-art.
Underactuated Motion Planning and Control for Jumping with Wheeled-Bipedal Robots
Dec 11, 2020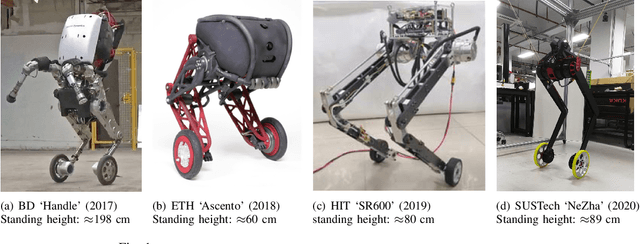

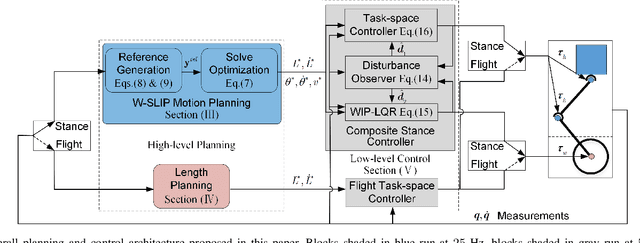
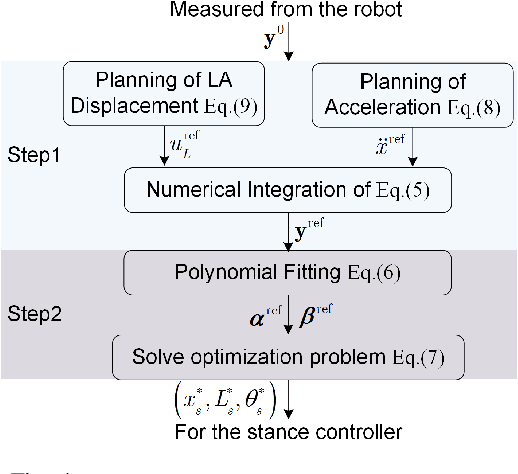
This paper studies jumping for wheeled-bipedal robots, a motion that takes full advantage of the benefits from the hybrid wheeled and legged design features. A comprehensive hierarchical scheme for motion planning and control of jumping with wheeled-bipedal robots is developed. Underactuation of the wheeled-bipedal dynamics is the main difficulty to be addressed, especially in the planning problem. To tackle this issue, a novel wheeled-spring-loaded inverted pendulum (W-SLIP) model is proposed to characterize the essential dynamics of wheeled-bipedal robots during jumping. Relying on a differential-flatness-like property of the W-SLIP model, a tractable quadratic programming based solution is devised for planning jumping motions for wheeled-bipedal robots. Combined with a kinematic planning scheme accounting for the flight phase motion, a complete planning scheme for the W-SLIP model is developed. To enable accurate tracking of the planned trajectories, a linear quadratic regulator based wheel controller and a task-space whole-body controller for the other joints are blended through disturbance observers. The overall planning and control scheme is validated using V-REP simulations of a prototype wheeled-bipedal robot.