 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicyFlow: Policy Optimization with Continuous Normalizing Flow in Reinforcement Learning
Feb 01, 2026Among on-policy reinforcement learning algorithms, Proximal Policy Optimization (PPO) demonstrates is widely favored for its simplicity, numerical stability, and strong empirical performance. Standard PPO relies on surrogate objectives defined via importance ratios, which require evaluating policy likelihood that is typically straightforward when the policy is modeled as a Gaussian distribution. However, extending PPO to more expressive, high-capacity policy models such as continuous normalizing flows (CNFs), also known as flow-matching models, is challenging because likelihood evaluation along the full flow trajectory is computationally expensive and often numerically unstable. To resolve this issue, we propose PolicyFlow, a novel on-policy CNF-based reinforcement learning algorithm that integrates expressive CNF policies with PPO-style objectives without requiring likelihood evaluation along the full flow path. PolicyFlow approximates importance ratios using velocity field variations along a simple interpolation path, reducing computational overhead without compromising training stability. To further prevent mode collapse and further encourage diverse behaviors, we propose the Brownian Regularizer, an implicit policy entropy regularizer inspired by Brownian motion, which is conceptually elegant and computationally lightweight. Experiments on diverse tasks across various environments including MultiGoal, PointMaze, IsaacLab and MuJoCo Playground show that PolicyFlow achieves competitive or superior performance compared to PPO using Gaussian policies and flow-based baselines including FPO and DPPO. Notably, results on MultiGoal highlight PolicyFlow's ability to capture richer multimodal action distributions.
LIPM-Guided Reinforcement Learning for Stable and Perceptive Locomotion in Bipedal Robots
Sep 11, 2025Achieving stable and robust perceptive locomotion for bipedal robots in unstructured outdoor environments remains a critical challenge due to complex terrain geometry and susceptibility to external disturbances. In this work, we propose a novel reward design inspired by the Linear Inverted Pendulum Model (LIPM) to enable perceptive and stable locomotion in the wild. The LIPM provides theoretical guidance for dynamic balance by regulating the center of mass (CoM) height and the torso orientation. These are key factors for terrain-aware locomotion, as they help ensure a stable viewpoint for the robot's camera. Building on this insight, we design a reward function that promotes balance and dynamic stability while encouraging accurate CoM trajectory tracking. To adaptively trade off between velocity tracking and stability, we leverage the Reward Fusion Module (RFM) approach that prioritizes stability when needed. A double-critic architecture is adopted to separately evaluate stability and locomotion objectives, improving training efficiency and robustness. We validate our approach through extensive experiments on a bipedal robot in both simulation and real-world outdoor environments. The results demonstrate superior terrain adaptability, disturbance rejection, and consistent performance across a wide range of speeds and perceptual conditions.
Multi-Loco: Unifying Multi-Embodiment Legged Locomotion via Reinforcement Learning Augmented Diffusion
Jun 13, 2025Generalizing locomotion policies across diverse legged robots with varying morphologies is a key challenge due to differences in observation/action dimensions and system dynamics. In this work, we propose Multi-Loco, a novel unified framework combining a morphology-agnostic generative diffusion model with a lightweight residual policy optimized via reinforcement learning (RL). The diffusion model captures morphology-invariant locomotion patterns from diverse cross-embodiment datasets, improving generalization and robustness. The residual policy is shared across all embodiments and refines the actions generated by the diffusion model, enhancing task-aware performance and robustness for real-world deployment. We evaluated our method with a rich library of four legged robots in both simulation and real-world experiments. Compared to a standard RL framework with PPO, our approach -- replacing the Gaussian policy with a diffusion model and residual term -- achieves a 10.35% average return improvement, with gains up to 13.57% in wheeled-biped locomotion tasks. These results highlight the benefits of cross-embodiment data and composite generative architectures in learning robust, generalized locomotion skills.
Task-Space Riccati Feedback based Whole Body Control for Underactuated Legged Locomotion
Mar 31, 2024This manuscript primarily aims to enhance the performance of whole-body controllers(WBC) for underactuated legged locomotion. We introduce a systematic parameter design mechanism for the floating-base feedback control within the WBC. The proposed approach involves utilizing the linearized model of unactuated dynamics to formulate a Linear Quadratic Regulator(LQR) and solving a Riccati gain while accounting for potential physical constraints through a second-order approximation of the log-barrier function. And then the user-tuned feedback gain for the floating base task is replaced by a new one constructed from the solved Riccati gain. Extensive simulations conducted in MuJoCo with a point bipedal robot, as well as real-world experiments performed on a quadruped robot, demonstrate the effectiveness of the proposed method. In the different bipedal locomotion tasks, compared with the user-tuned method, the proposed approach is at least 12% better and up to 50% better at linear velocity tracking, and at least 7% better and up to 47% better at angular velocity tracking. In the quadruped experiment, linear velocity tracking is improved by at least 3% and angular velocity tracking is improved by at least 23% using the proposed method.
Template Model Inspired Task Space Learning for Robust Bipedal Locomotion
Sep 27, 2023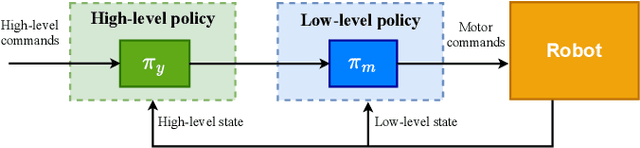
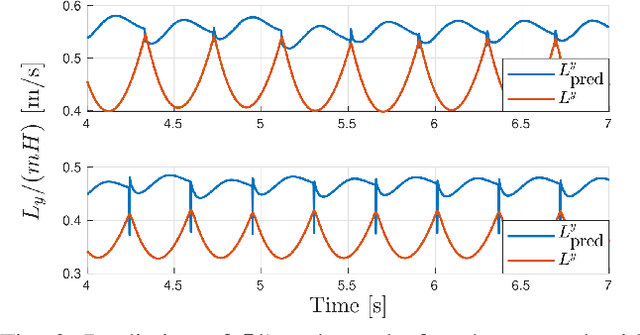
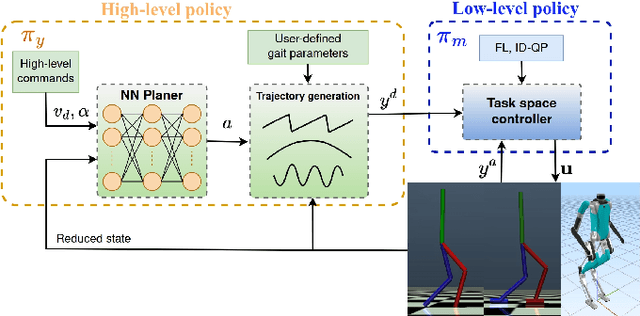
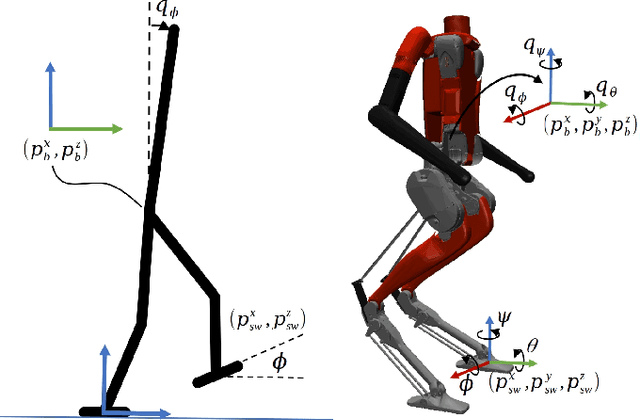
This work presents a hierarchical framework for bipedal locomotion that combines a Reinforcement Learning (RL)-based high-level (HL) planner policy for the online generation of task space commands with a model-based low-level (LL) controller to track the desired task space trajectories. Different from traditional end-to-end learning approaches, our HL policy takes insights from the angular momentum-based linear inverted pendulum (ALIP) to carefully design the observation and action spaces of the Markov Decision Process (MDP). This simple yet effective design creates an insightful mapping between a low-dimensional state that effectively captures the complex dynamics of bipedal locomotion and a set of task space outputs that shape the walking gait of the robot. The HL policy is agnostic to the task space LL controller, which increases the flexibility of the design and generalization of the framework to other bipedal robots. This hierarchical design results in a learning-based framework with improved performance, data efficiency, and robustness compared with the ALIP model-based approach and state-of-the-art learning-based frameworks for bipedal locomotion. The proposed hierarchical controller is tested in three different robots, Rabbit, a five-link underactuated planar biped; Walker2D, a seven-link fully-actuated planar biped; and Digit, a 3D humanoid robot with 20 actuated joints. The trained policy naturally learns human-like locomotion behaviors and is able to effectively track a wide range of walking speeds while preserving the robustness and stability of the walking gait even under adversarial conditions.
Quadruped Capturability and Push Recovery via a Switched-Systems Characterization of Dynamic Balance
Feb 17, 2022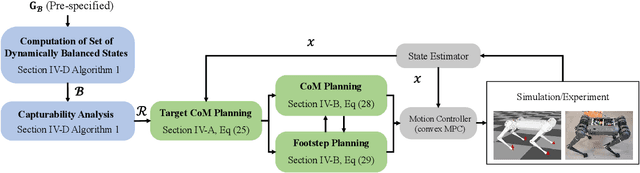

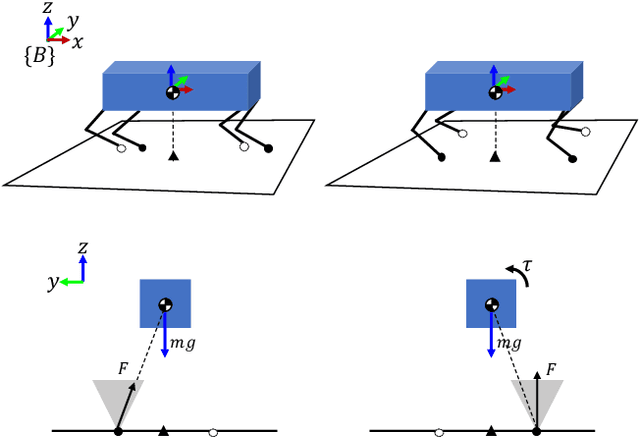
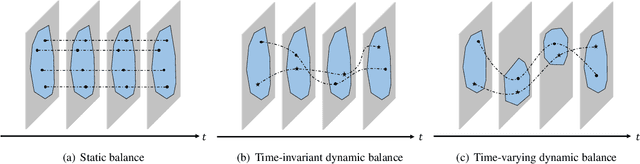
This paper studies capturability and push recovery for quadrupedal locomotion. Despite the rich literature on capturability analysis and push recovery control for legged robots, existing tools are developed mainly for bipeds or humanoids. Distinct quadrupedal features such as point contacts and multiple swinging legs prevent direct application of these methods. To address this gap, we propose a switched systems model for quadruped dynamics, and instantiate the abstract viability concept for quadrupedal locomotion with a time-based gait. Capturability is characterized through a novel specification of dynamically balanced states that addresses the time-varying nature of quadrupedal locomotion and balance. A linear inverted pendulum (LIP) model is adopted to demonstrate the theory and show how the newly developed quadrupedal capturability can be used in motion planning for quadrupedal push recovery. We formulate and solve an explicit model predictive control (EMPC) problem whose optimal solution fully characterizes quadrupedal capturability with the LIP. Given this analysis, an optimization-based planning scheme is devised for determining footsteps and center of mass references during push recovery. To validate the effectiveness of the overall framework, we conduct numerous simulation and hardware experiments. Simulation results illustrate the necessity of considering dynamic balance for quadrupedal capturability, and the significant improvement in disturbance rejection with the proposed strategy. Experimental validations on a replica of the Mini Cheetah quadruped demonstrate an up to 100% improvement as compared with state-of-the-art.
Force-feedback based Whole-body Stabilizer for Position-Controlled Humanoid Robots
Aug 15, 2021
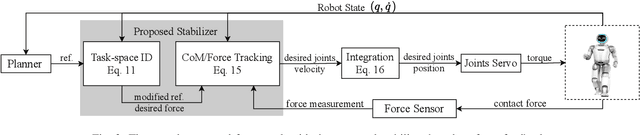
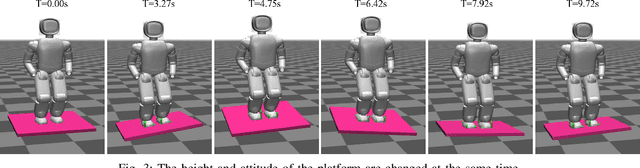
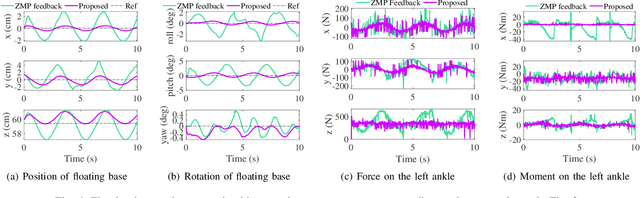
This paper studies stabilizer design for position-controlled humanoid robots. Stabilizers are an essential part for position-controlled humanoids, whose primary objective is to adjust the control input sent to the robot to assist the tracking controller to better follow the planned reference trajectory. To achieve this goal, this paper develops a novel force-feedback based whole-body stabilizer that fully exploits the six-dimensional force measurement information and the whole-body dynamics to improve tracking performance. Relying on rigorous analysis of whole-body dynamics of position-controlled humanoids under unknown contact, the developed stabilizer leverages quadratic-programming based technique that allows cooperative consideration of both the center-of-mass tracking and contact force tracking. The effectiveness of the proposed stabilizer is demonstrated on the UBTECH Walker robot in the MuJoCo simulator. Simulation validations show a significant improvement in various scenarios as compared to commonly adopted stabilizers based on the zero-moment-point feedback and the linear inverted pendulum model.