 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-feedback based Whole-body Stabilizer for Position-Controlled Humanoid Robots
Paper and Code
Aug 15, 2021
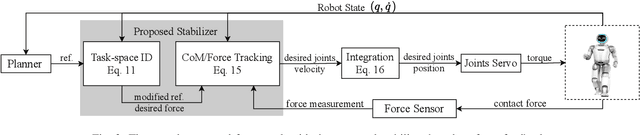
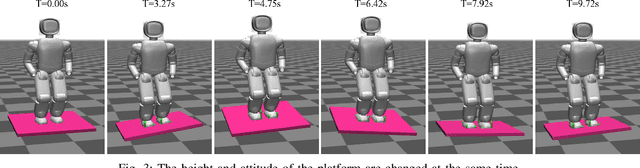
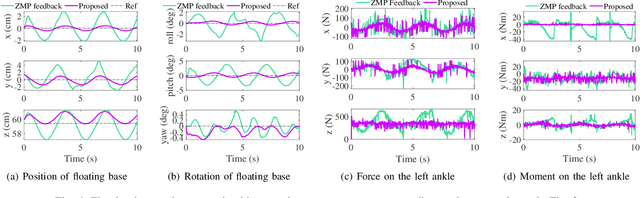
This paper studies stabilizer design for position-controlled humanoid robots. Stabilizers are an essential part for position-controlled humanoids, whose primary objective is to adjust the control input sent to the robot to assist the tracking controller to better follow the planned reference trajectory. To achieve this goal, this paper develops a novel force-feedback based whole-body stabilizer that fully exploits the six-dimensional force measurement information and the whole-body dynamics to improve tracking performance. Relying on rigorous analysis of whole-body dynamics of position-controlled humanoids under unknown contact, the developed stabilizer leverages quadratic-programming based technique that allows cooperative consideration of both the center-of-mass tracking and contact force tracking. The effectiveness of the proposed stabilizer is demonstrated on the UBTECH Walker robot in the MuJoCo simulator. Simulation validations show a significant improvement in various scenarios as compared to commonly adopted stabilizers based on the zero-moment-point feedback and the linear inverted pendulum model.