 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Loco: Unifying Multi-Embodiment Legged Locomotion via Reinforcement Learning Augmented Diffusion
Jun 13, 2025Generalizing locomotion policies across diverse legged robots with varying morphologies is a key challenge due to differences in observation/action dimensions and system dynamics. In this work, we propose Multi-Loco, a novel unified framework combining a morphology-agnostic generative diffusion model with a lightweight residual policy optimized via reinforcement learning (RL). The diffusion model captures morphology-invariant locomotion patterns from diverse cross-embodiment datasets, improving generalization and robustness. The residual policy is shared across all embodiments and refines the actions generated by the diffusion model, enhancing task-aware performance and robustness for real-world deployment. We evaluated our method with a rich library of four legged robots in both simulation and real-world experiments. Compared to a standard RL framework with PPO, our approach -- replacing the Gaussian policy with a diffusion model and residual term -- achieves a 10.35% average return improvement, with gains up to 13.57% in wheeled-biped locomotion tasks. These results highlight the benefits of cross-embodiment data and composite generative architectures in learning robust, generalized locomotion skills.
G-DReaM: Graph-conditioned Diffusion Retargeting across Multiple Embodiments
May 27, 2025Motion retargeting for specific robot from existing motion datasets is one critical step in transferring motion patterns from human behaviors to and across various robots. However, inconsistencies in topological structure, geometrical parameters as well as joint correspondence make it difficult to handle diverse embodiments with a unified retargeting architecture. In this work, we propose a novel unified graph-conditioned diffusion-based motion generation framework for retargeting reference motions across diverse embodiments. The intrinsic characteristics of heterogeneous embodiments are represented with graph structure that effectively captures topological and geometrical features of different robots. Such a graph-based encoding further allows for knowledge exploitation at the joint level with a customized attention mechanisms developed in this work. For lacking ground truth motions of the desired embodiment, we utilize an energy-based guidance formulated as retargeting losses to train the diffusion model. As one of the first cross-embodiment motion retargeting methods in robotics, our experiments validate that the proposed model can retarget motions across heterogeneous embodiments in a unified manner. Moreover, it demonstrates a certain degree of generalization to both diverse skeletal structures and similar motion patterns.
Real-time Trajectory Optimization and Control for Ball Bumping with Quadruped Robots
Oct 11, 2022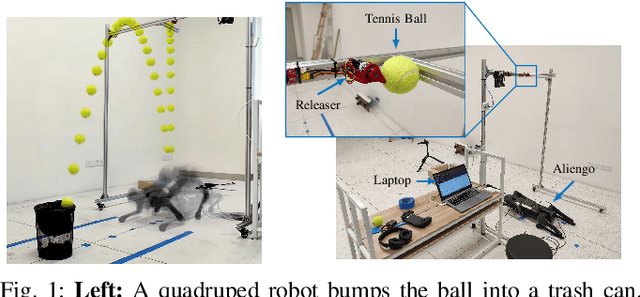
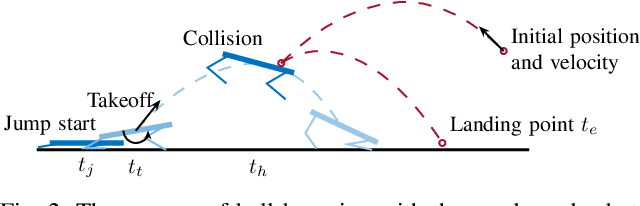
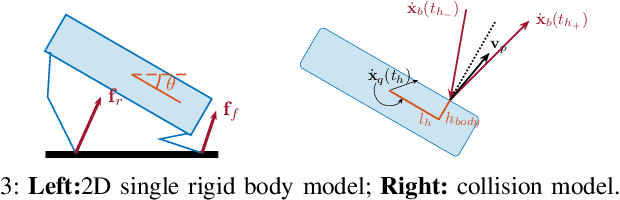

This paper studies real-time motion planning and control for ball bumping motion with quadruped robots. To enable the quadruped to bump the flying ball with different initializations, we develop a nonlinear trajectory optimization-based planning scheme that jointly identifies the take-off time and state to achieve accurate ball hitting during the flight phase. Such a planning scheme employs a two-dimensional single rigid body model that achieves a satisfactory balance between accuracy and efficiency for the highly time-sensitive task. To precisely execute the planned motion, the tracking controller needs to incorporate the strict time-state constraint imposed on the take-off and ball-hitting events. To this end, we develop an improved model predictive controller that respects the critical time-state constraints. The proposed planning and control framework is validated with a real Aliengo robot. Experiments show that the problem planning approach can be computed in approximately 60ms on average, enabling successful accomplishment of the ball bumping motion with various initializations in real time.