 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Trajectory Optimization and Control for Ball Bumping with Quadruped Robots
Paper and Code
Oct 11, 2022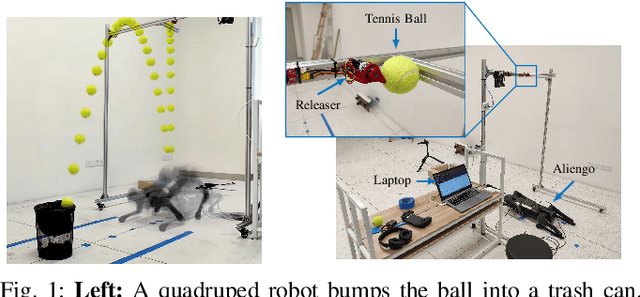
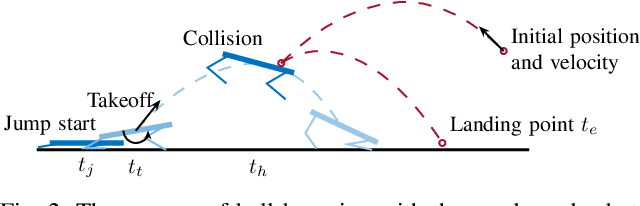
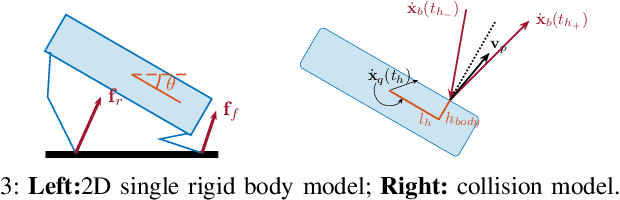

This paper studies real-time motion planning and control for ball bumping motion with quadruped robots. To enable the quadruped to bump the flying ball with different initializations, we develop a nonlinear trajectory optimization-based planning scheme that jointly identifies the take-off time and state to achieve accurate ball hitting during the flight phase. Such a planning scheme employs a two-dimensional single rigid body model that achieves a satisfactory balance between accuracy and efficiency for the highly time-sensitive task. To precisely execute the planned motion, the tracking controller needs to incorporate the strict time-state constraint imposed on the take-off and ball-hitting events. To this end, we develop an improved model predictive controller that respects the critical time-state constraints. The proposed planning and control framework is validated with a real Aliengo robot. Experiments show that the problem planning approach can be computed in approximately 60ms on average, enabling successful accomplishment of the ball bumping motion with various initializations in real time.