 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheeled Humanoid Bilateral Teleoperation with Position-Force Control Modes for Dynamic Loco-Manipulation
Jul 16, 2024



Remote-controlled humanoid robots can revolutionize manufacturing, construction, and healthcare industries by performing complex or dangerous manual tasks traditionally done by humans. We refer to these behaviors as Dynamic Loco-Manipulation (DLM). To successfully complete these tasks, humans control the position of their bodies and contact forces at their hands. To enable similar whole-body control in humanoids, we introduce loco-manipulation retargeting strategies with switched position and force control modes in a bilateral teleoperation framework. Our proposed locomotion mappings use the pitch and yaw of the operator's torso to control robot position or acceleration. The manipulation retargeting maps the operator's arm movements to the robot's arms for joint-position or impedance control of the end-effector. A Human-Machine Interface captures the teleoperator's motion and provides haptic feedback to their torso, enhancing their awareness of the robot's interactions with the environment. In this paper, we demonstrate two forms of DLM. First, we show the robot slotting heavy boxes (5-10.5 kg), weighing up to 83% of the robot's weight, into desired positions. Second, we show human-robot collaboration for carrying an object, where the robot and teleoperator take on leader and follower roles.
Real-to-Sim Adaptation via High-Fidelity Simulation to Control a Wheeled-Humanoid Robot with Unknown Dynamics
Mar 16, 2024



Model-based controllers using a linearized model around the system's equilibrium point is a common approach in the control of a wheeled humanoid due to their less computational load and ease of stability analysis. However, controlling a wheeled humanoid robot while it lifts an unknown object presents significant challenges, primarily due to the lack of knowledge in object dynamics. This paper presents a framework designed for predicting the new equilibrium point explicitly to control a wheeled-legged robot with unknown dynamics. We estimated the total mass and center of mass of the system from its response to initially unknown dynamics, then calculated the new equilibrium point accordingly. To avoid using additional sensors (e.g., force torque sensor) and reduce the effort of obtaining expensive real data, a data-driven approach is utilized with a novel real-to-sim adaptation. A more accurate nonlinear dynamics model, offering a closer representation of real-world physics, is injected into a rigid-body simulation for real-to-sim adaptation. The nonlinear dynamics model parameters were optimized using Particle Swarm Optimization. The efficacy of this framework was validated on a physical wheeled inverted pendulum, a simplified model of a wheeled-legged robot. The experimental results indicate that employing a more precise analytical model with optimized parameters significantly reduces the gap between simulation and reality, thus improving the efficiency of a model-based controller in controlling a wheeled robot with unknown dynamics.
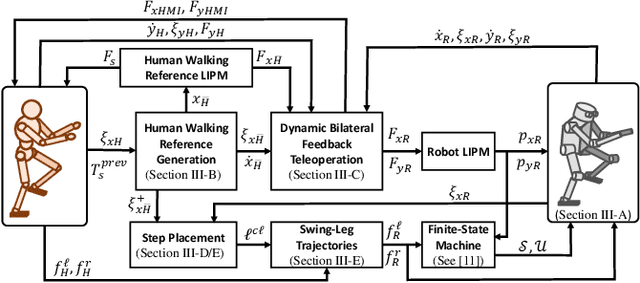
Whole-Body Dynamic Telelocomotion: A Step-to-Step Dynamics Approach to Human Walking Reference Generation
Jul 21, 2023Teleoperated humanoid robots hold significant potential as physical avatars for humans in hazardous and inaccessible environments, with the goal of channeling human intelligence and sensorimotor skills through these robotic counterparts. Precise coordination between humans and robots is crucial for accomplishing whole-body behaviors involving locomotion and manipulation. To progress successfully, dynamic synchronization between humans and humanoid robots must be achieved. This work enhances advancements in whole-body dynamic telelocomotion, addressing challenges in robustness. By embedding the hybrid and underactuated nature of bipedal walking into a virtual human walking interface, we achieve dynamically consistent walking gait generation. Additionally, we integrate a reactive robot controller into a whole-body dynamic telelocomotion framework. Thus, allowing the realization of telelocomotion behaviors on the full-body dynamics of a bipedal robot. Real-time telelocomotion simulation experiments validate the effectiveness of our methods, demonstrating that a trained human pilot can dynamically synchronize with a simulated bipedal robot, achieving sustained locomotion, controlling walking speeds within the range of 0.0 m/s to 0.3 m/s, and enabling backward walking for distances of up to 2.0 m. This research contributes to advancing teleoperated humanoid robots and paves the way for future developments in synchronized locomotion between humans and bipedal robots.
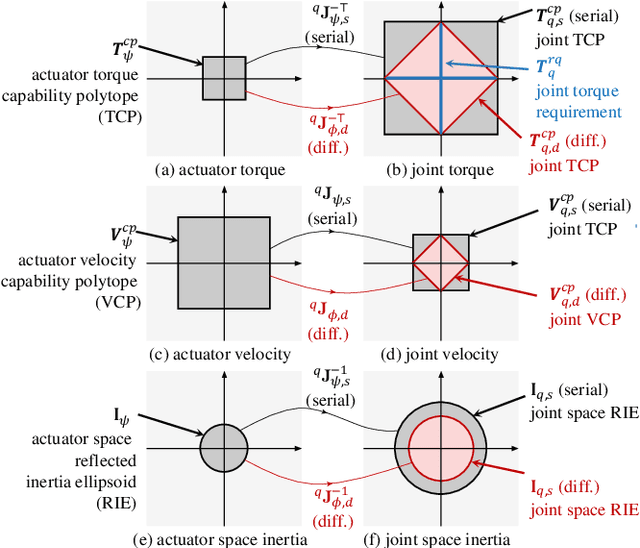
Control- & Task-Aware Optimal Design of Actuation System for Legged Robots using Binary Integer Linear Programming
Jul 21, 2023Athletic robots demand a whole-body actuation system design that utilizes motors up to the boundaries of their performance. However, creating such robots poses challenges of integrating design principles and reasoning of practical design choices. This paper presents a design framework that guides designers to find optimal design choices to create an actuation system that can rapidly generate torques and velocities required to achieve a given set of tasks, by minimizing inertia and leveraging cooperation between actuators. The framework serves as an interactive tool for designers who are in charge of providing design rules and candidate components such as motors, reduction mechanism, and coupling mechanisms between actuators and joints. A binary integer linear optimization explores design combinations to find optimal components that can achieve a set of tasks. The framework is demonstrated with 200 optimal design studies of a biped with 5-degree-of-freedom (DoF) legs, focusing on the effect of achieving multiple tasks (walking, lifting), constraining the mass budget of all motors in the system and the use of coupling mechanisms. The result provides a comprehensive view of how design choices and rules affect reflected inertia, copper loss of motors, and force capability of optimal actuation systems.
Bipedal Robot Walking Control Using Human Whole-Body Dynamic Telelocomotion
Sep 14, 2022


For humanoids to be deployed in demanding situations, such as search and rescue, highly intelligent decision making and proficient sensorimotor skill is expected. A promising solution is to leverage human prowess by interconnecting robot and human via teleoperation. Towards creating seamless operation, this paper presents a dynamic telelocomotion framework that synchronizes the gait of a human pilot with the walking of a bipedal robot. First, we introduce a method to generate a virtual human walking model from the stepping behavior of a human pilot which serves as a reference for the robot to walk. Second, the dynamics of the walking reference and robot walking are synchronized by applying forces to the human pilot and the robot to achieve dynamic similarity between the two systems. This enables the human pilot to continuously perceive and cancel any asynchrony between the walking reference and robot. A consistent step placement strategy for the robot is derived to maintain dynamic similarity through step transitions. Using our human-machine-interface, we demonstrate that the human pilot can achieve stable and synchronous teleoperation of a simulated robot through stepping-in-place, walking, and disturbance rejection experiments. This work provides a fundamental step towards transferring human intelligence and reflexes to humanoid robots.
Tello Leg: The Study of Design Principles and Metrics for Dynamic Humanoid Robots
Mar 01, 2022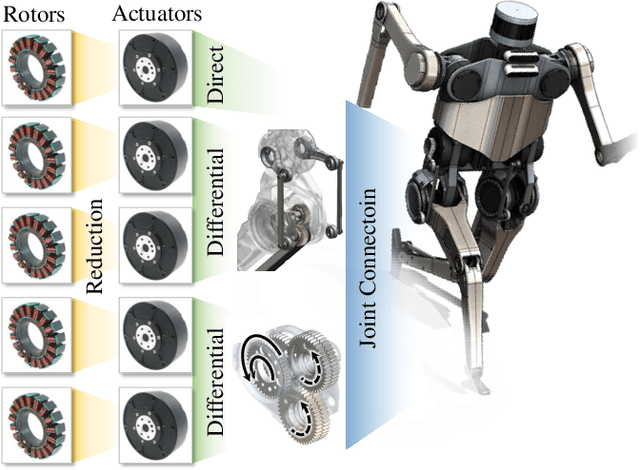
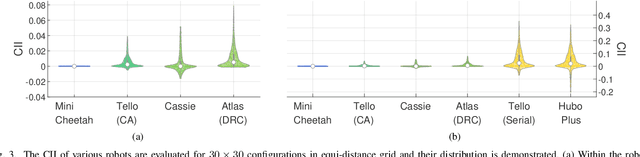
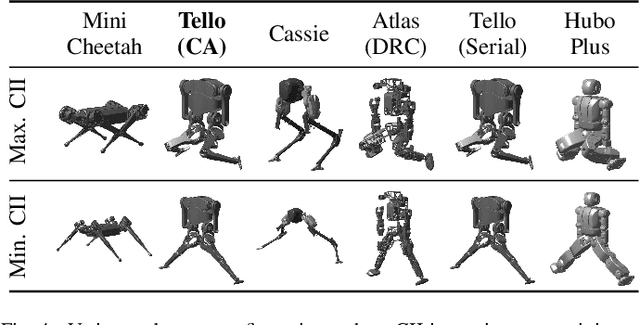
To be useful tools in real scenarios, humanoid robots must realize tasks dynamically. This means that they must be capable of applying substantial forces, rapidly swinging their limbs, and also mitigating impacts that may occur during the motion. Towards creating capable humanoids, this letter presents the leg of the robot TELLO and demonstrates how it embodies two new fundamental design concepts for dynamic legged robots. The limbs follows the principles of: (i) Cooperative Actuation (CA), by combining motors in differential configurations to increase the force capability of the limb. We demonstrate that the CA configuration requires half the motor torque to perform a jump in comparison to conventional serial design configurations. And (ii) proximal actuation, by placing heavy motors near the body to reduce the inertia of the limb. To quantify the effect of motor placement on the robot's dynamics, we introduce a novel metric entitle Centroidal Inertia Isotropy (CII). We show that the design of state-of-the-art dynamic legged robots empirically increase the CII to improve agility and facilitate model-based control. We hope this metric will enable a quantifiable way to design these machines in the future.
The dynamic effect of mechanical losses of transmissions on the equation of motion of legged robots
Jun 03, 2021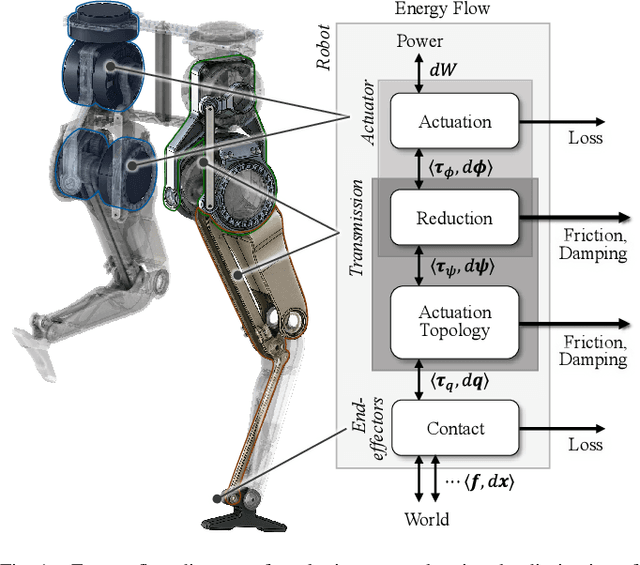
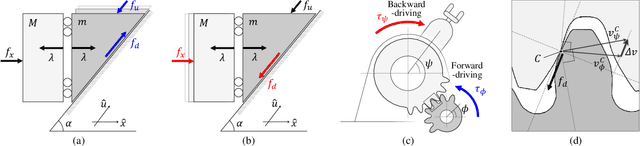
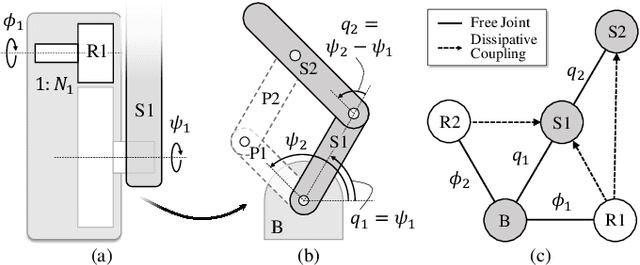
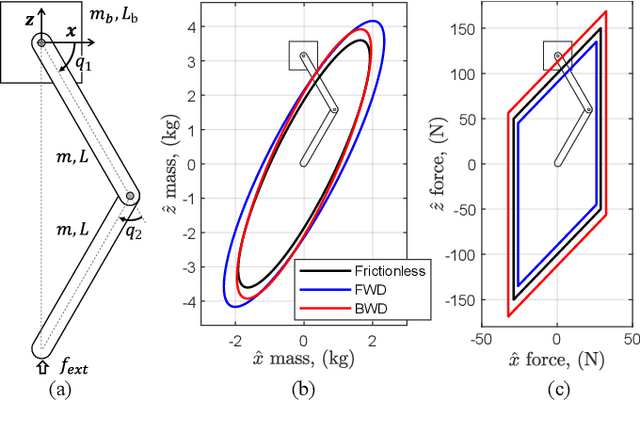
Industrial manipulators do not collapse under their own weight when powered off due to the friction in their joints. Although these mechanism are effective for stiff position control of pick-and-place, they are inappropriate for legged robots that must rapidly regulate compliant interactions with the environment. However, no metric exists to quantify the robot's performance degradation due to mechanical losses in the actuators and transmissions. This paper provides a fundamental formulation that uses the mechanical efficiency of transmissions to quantify the effect of power losses in the mechanical transmissions on the dynamics of a whole robotic system. We quantitatively demonstrate the intuitive fact that the apparent inertia of the robots increase in the presence of joint friction. We also show that robots that employ high gear ratio and low efficiency transmissions can statically sustain more substantial external loads. We expect that the framework presented here will provide the fundamental tools for designing the next generation of legged robots that can effectively interact with the world.