 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeavy lifting tasks via haptic teleoperation of a wheeled humanoid
May 26, 2025



Humanoid robots can support human workers in physically demanding environments by performing tasks that require whole-body coordination, such as lifting and transporting heavy objects.These tasks, which we refer to as Dynamic Mobile Manipulation (DMM), require the simultaneous control of locomotion, manipulation, and posture under dynamic interaction forces. This paper presents a teleoperation framework for DMM on a height-adjustable wheeled humanoid robot for carrying heavy payloads. A Human-Machine Interface (HMI) enables whole-body motion retargeting from the human pilot to the robot by capturing the motion of the human and applying haptic feedback. The pilot uses body motion to regulate robot posture and locomotion, while arm movements guide manipulation.Real time haptic feedback delivers end effector wrenches and balance related cues, closing the loop between human perception and robot environment interaction. We evaluate the different telelocomotion mappings that offer varying levels of balance assistance, allowing the pilot to either manually or automatically regulate the robot's lean in response to payload-induced disturbances. The system is validated in experiments involving dynamic lifting of barbells and boxes up to 2.5 kg (21% of robot mass), demonstrating coordinated whole-body control, height variation, and disturbance handling under pilot guidance. Video demo can be found at: https://youtu.be/jF270_bG1h8?feature=shared
Steerable rolling of a 1-DoF robot using an internal pendulum
Apr 16, 2025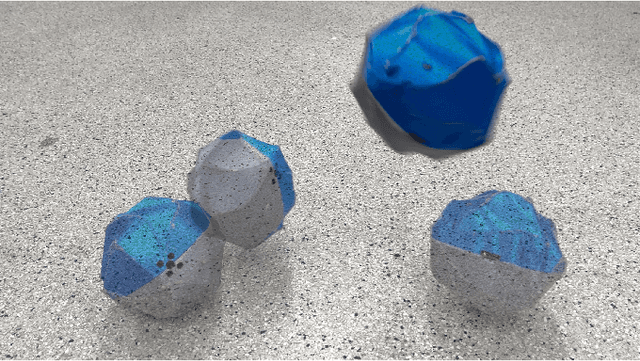
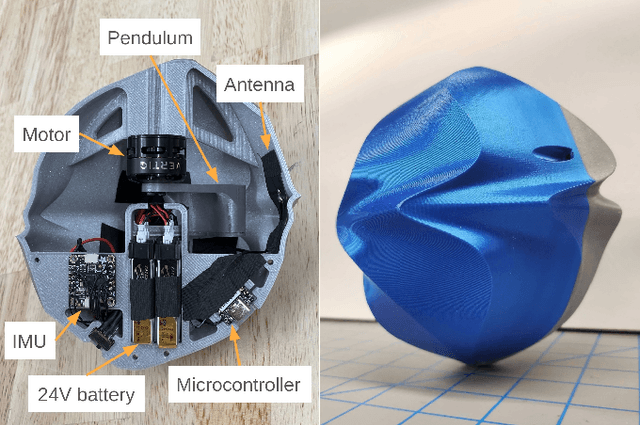
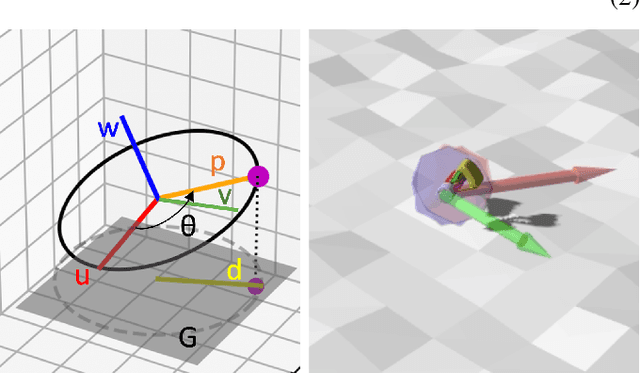
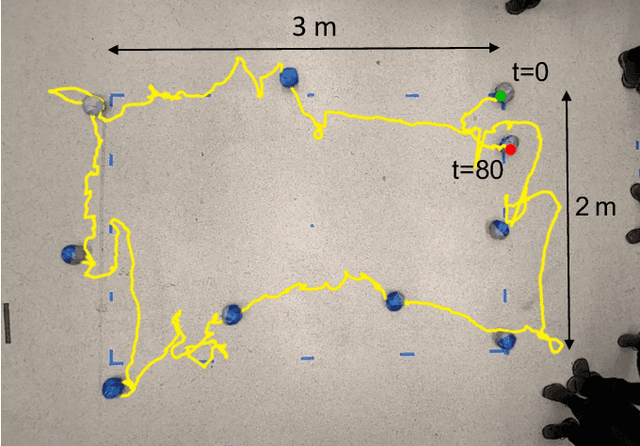
We present ROCK (Rolling One-motor Controlled rocK), a 1 degree-of-freedom robot consisting of a round shell and an internal pendulum. An uneven shell surface enables steering by using only the movement of the pendulum, allowing for mechanically simple designs that may be feasible to scale to large quantities or small sizes. We train a control policy using reinforcement learning in simulation and deploy it onto the robot to complete a rectangular trajectory.
Pinto: A latched spring actuated robot for jumping and perching
Sep 13, 2024Arboreal environments challenge current robots but are deftly traversed by many familiar animal locomotors such as squirrels. We present a small, 450 g robot "Pinto" developed for tree-jumping, a behavior seen in squirrels but rarely in legged robots: jumping from the ground onto a vertical tree trunk. We develop a powerful and lightweight latched series-elastic actuator using a twisted string and carbon fiber springs. We consider the effects of scaling down conventional quadrupeds and experimentally show how storing energy in a parallel-elastic fashion using a latch increases jump energy compared to series-elastic or springless strategies. By switching between series and parallel-elastic modes with our latched 5-bar leg mechanism, Pinto executes energetic jumps as well as maintains continuous control during shorter bounding motions. We also develop sprung 2-DoF arms equipped with spined grippers to grasp tree bark for high-speed perching following a jump.
Wheeled Humanoid Bilateral Teleoperation with Position-Force Control Modes for Dynamic Loco-Manipulation
Jul 16, 2024



Remote-controlled humanoid robots can revolutionize manufacturing, construction, and healthcare industries by performing complex or dangerous manual tasks traditionally done by humans. We refer to these behaviors as Dynamic Loco-Manipulation (DLM). To successfully complete these tasks, humans control the position of their bodies and contact forces at their hands. To enable similar whole-body control in humanoids, we introduce loco-manipulation retargeting strategies with switched position and force control modes in a bilateral teleoperation framework. Our proposed locomotion mappings use the pitch and yaw of the operator's torso to control robot position or acceleration. The manipulation retargeting maps the operator's arm movements to the robot's arms for joint-position or impedance control of the end-effector. A Human-Machine Interface captures the teleoperator's motion and provides haptic feedback to their torso, enhancing their awareness of the robot's interactions with the environment. In this paper, we demonstrate two forms of DLM. First, we show the robot slotting heavy boxes (5-10.5 kg), weighing up to 83% of the robot's weight, into desired positions. Second, we show human-robot collaboration for carrying an object, where the robot and teleoperator take on leader and follower roles.