 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeavy lifting tasks via haptic teleoperation of a wheeled humanoid
May 26, 2025



Humanoid robots can support human workers in physically demanding environments by performing tasks that require whole-body coordination, such as lifting and transporting heavy objects.These tasks, which we refer to as Dynamic Mobile Manipulation (DMM), require the simultaneous control of locomotion, manipulation, and posture under dynamic interaction forces. This paper presents a teleoperation framework for DMM on a height-adjustable wheeled humanoid robot for carrying heavy payloads. A Human-Machine Interface (HMI) enables whole-body motion retargeting from the human pilot to the robot by capturing the motion of the human and applying haptic feedback. The pilot uses body motion to regulate robot posture and locomotion, while arm movements guide manipulation.Real time haptic feedback delivers end effector wrenches and balance related cues, closing the loop between human perception and robot environment interaction. We evaluate the different telelocomotion mappings that offer varying levels of balance assistance, allowing the pilot to either manually or automatically regulate the robot's lean in response to payload-induced disturbances. The system is validated in experiments involving dynamic lifting of barbells and boxes up to 2.5 kg (21% of robot mass), demonstrating coordinated whole-body control, height variation, and disturbance handling under pilot guidance. Video demo can be found at: https://youtu.be/jF270_bG1h8?feature=shared
Wheeled Humanoid Bilateral Teleoperation with Position-Force Control Modes for Dynamic Loco-Manipulation
Jul 16, 2024



Remote-controlled humanoid robots can revolutionize manufacturing, construction, and healthcare industries by performing complex or dangerous manual tasks traditionally done by humans. We refer to these behaviors as Dynamic Loco-Manipulation (DLM). To successfully complete these tasks, humans control the position of their bodies and contact forces at their hands. To enable similar whole-body control in humanoids, we introduce loco-manipulation retargeting strategies with switched position and force control modes in a bilateral teleoperation framework. Our proposed locomotion mappings use the pitch and yaw of the operator's torso to control robot position or acceleration. The manipulation retargeting maps the operator's arm movements to the robot's arms for joint-position or impedance control of the end-effector. A Human-Machine Interface captures the teleoperator's motion and provides haptic feedback to their torso, enhancing their awareness of the robot's interactions with the environment. In this paper, we demonstrate two forms of DLM. First, we show the robot slotting heavy boxes (5-10.5 kg), weighing up to 83% of the robot's weight, into desired positions. Second, we show human-robot collaboration for carrying an object, where the robot and teleoperator take on leader and follower roles.
Real-to-Sim Adaptation via High-Fidelity Simulation to Control a Wheeled-Humanoid Robot with Unknown Dynamics
Mar 16, 2024



Model-based controllers using a linearized model around the system's equilibrium point is a common approach in the control of a wheeled humanoid due to their less computational load and ease of stability analysis. However, controlling a wheeled humanoid robot while it lifts an unknown object presents significant challenges, primarily due to the lack of knowledge in object dynamics. This paper presents a framework designed for predicting the new equilibrium point explicitly to control a wheeled-legged robot with unknown dynamics. We estimated the total mass and center of mass of the system from its response to initially unknown dynamics, then calculated the new equilibrium point accordingly. To avoid using additional sensors (e.g., force torque sensor) and reduce the effort of obtaining expensive real data, a data-driven approach is utilized with a novel real-to-sim adaptation. A more accurate nonlinear dynamics model, offering a closer representation of real-world physics, is injected into a rigid-body simulation for real-to-sim adaptation. The nonlinear dynamics model parameters were optimized using Particle Swarm Optimization. The efficacy of this framework was validated on a physical wheeled inverted pendulum, a simplified model of a wheeled-legged robot. The experimental results indicate that employing a more precise analytical model with optimized parameters significantly reduces the gap between simulation and reality, thus improving the efficiency of a model-based controller in controlling a wheeled robot with unknown dynamics.
A Robust Localization Solution for an Uncrewed Ground Vehicle in Unstructured Outdoor GNSS-Denied Environments
Sep 05, 2023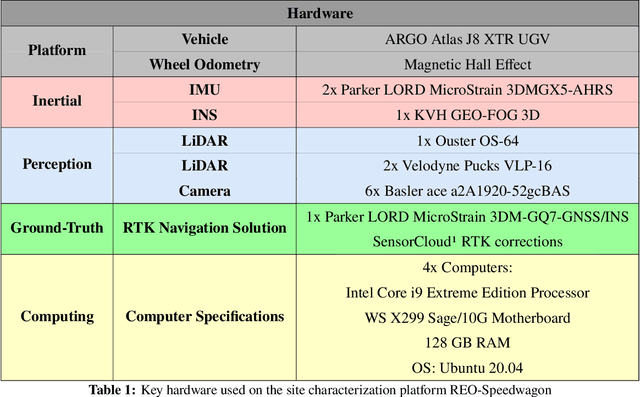
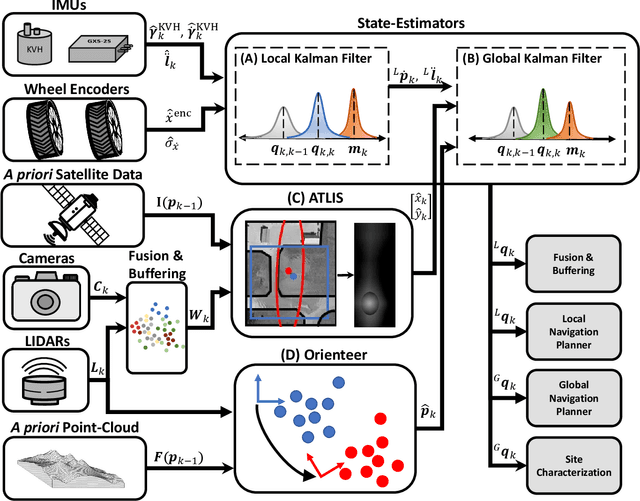
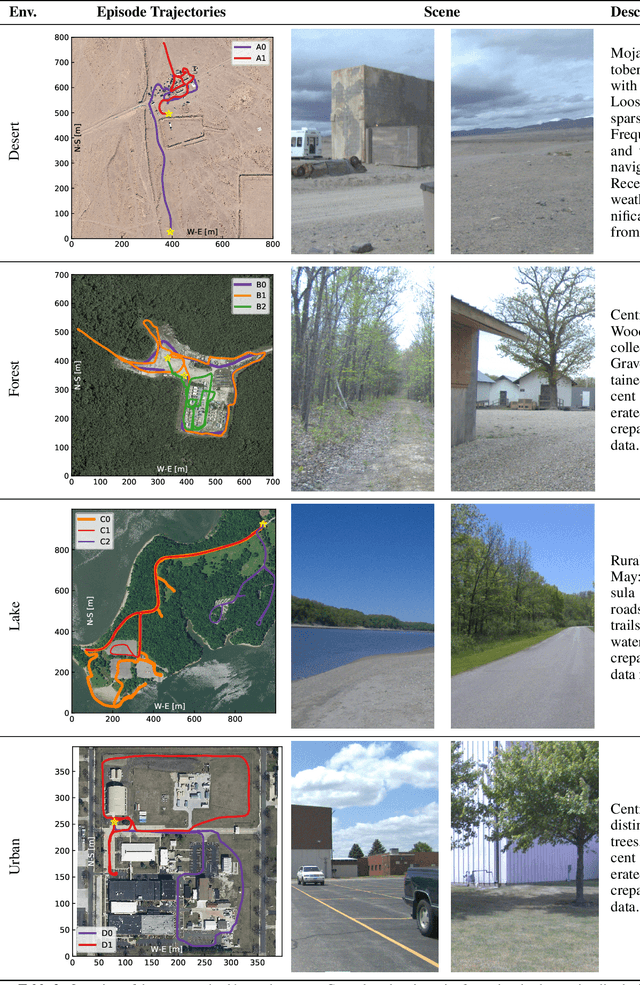
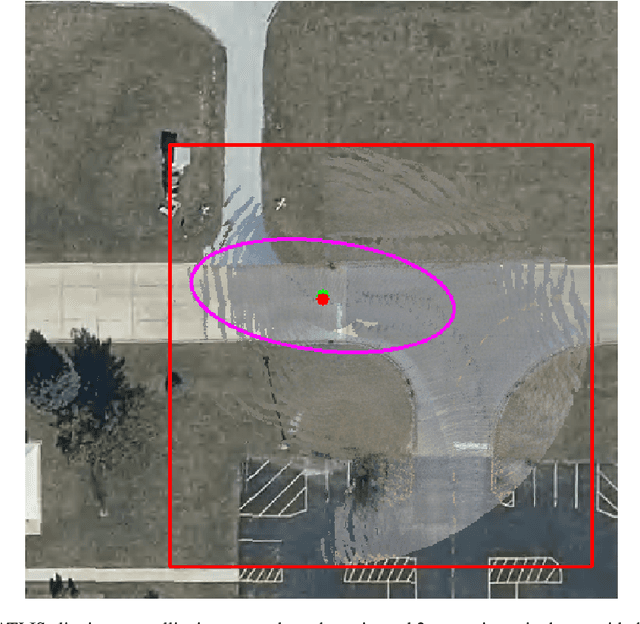
This work addresses the challenge of developing a localization system for an uncrewed ground vehicle (UGV) operating autonomously in unstructured outdoor Global Navigation Satellite System (GNSS)-denied environments. The goal is to enable accurate mapping and long-range navigation with practical applications in domains such as autonomous construction, military engineering missions, and exploration of non-Earth planets. The proposed system - Terrain-Referenced Assured Engineer Localization System (TRAELS) - integrates pose estimates produced by two complementary terrain referenced navigation (TRN) methods with wheel odometry and inertial measurement unit (IMU) measurements using an Extended Kalman Filter (EKF). Unlike simultaneous localization and mapping (SLAM) systems that require loop closures, the described approach maintains accuracy over long distances and one-way missions without the need to revisit previous positions. Evaluation of TRAELS is performed across a range of environments. In regions where a combination of distinctive geometric and ground surface features are present, the developed TRN methods are leveraged by TRAELS to consistently achieve an absolute trajectory error of less than 3.0 m. The approach is also shown to be capable of recovering from large accumulated drift when traversing feature-sparse areas, which is essential in ensuring robust performance of the system across a wide variety of challenging GNSS-denied environments. Overall, the effectiveness of the system in providing precise localization and mapping capabilities in challenging GNSS-denied environments is demonstrated and an analysis is performed leading to insights for improving TRN approaches for UGVs.
Dynamic Mobile Manipulation via Whole-Body Bilateral Teleoperation of a Wheeled Humanoid
Jul 03, 2023



Humanoid robots have the potential to help human workers by realizing physically demanding manipulation tasks such as moving large boxes within warehouses. We define such tasks as Dynamic Mobile Manipulation (DMM). This paper presents a framework for DMM via whole-body teleoperation, built upon three key contributions: Firstly, a teleoperation framework employing a Human Machine Interface (HMI) and a bi-wheeled humanoid, SATYRR, is proposed. Secondly, the study introduces a dynamic locomotion mapping, utilizing human-robot reduced order models, and a kinematic retargeting strategy for manipulation tasks. Additionally, the paper discusses the role of whole-body haptic feedback for wheeled humanoid control. Finally, the system's effectiveness and mappings for DMM are validated through locomanipulation experiments and heavy box pushing tasks. Here we show two forms of DMM: grasping a target moving at an average speed of 0.4 m/s, and pushing boxes weighing up to 105\% of the robot's weight. By simultaneously adjusting their pitch and using their arms, the pilot adjusts the robot pose to apply larger contact forces and move a heavy box at a constant velocity of 0.2 m/s.
Hybrid LMC: Hybrid Learning and Model-based Control for Wheeled Humanoid Robot via Ensemble Deep Reinforcement Learning
Apr 07, 2022
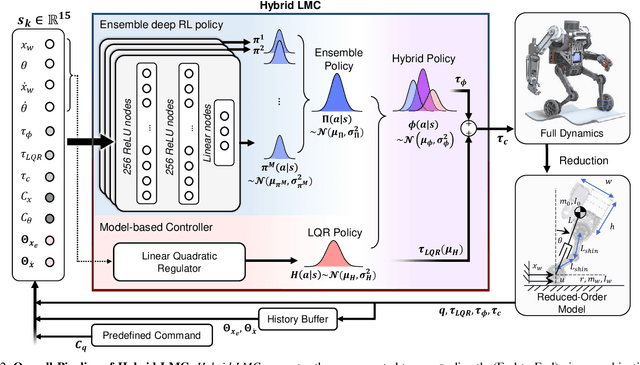
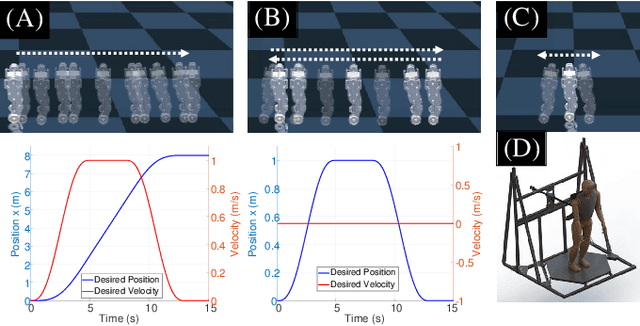
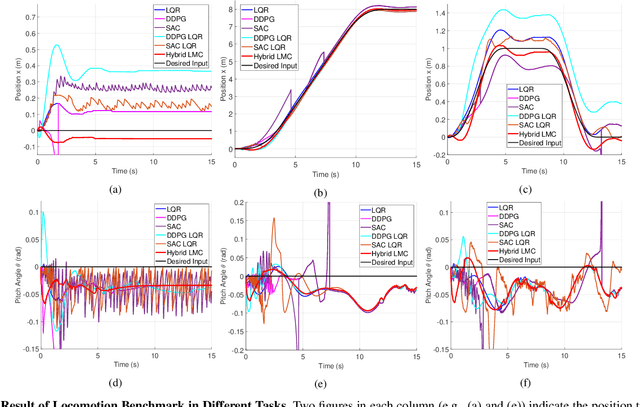
Control of wheeled humanoid locomotion is a challenging problem due to the nonlinear dynamics and under-actuated characteristics of these robots. Traditionally, feedback controllers have been utilized for stabilization and locomotion. However, these methods are often limited by the fidelity of the underlying model used, choice of controller, and environmental variables considered (surface type, ground inclination, etc). Recent advances in reinforcement learning (RL) offer promising methods to tackle some of these conventional feedback controller issues, but require large amounts of interaction data to learn. Here, we propose a hybrid learning and model-based controller Hybrid LMC that combines the strengths of a classical linear quadratic regulator (LQR) and ensemble deep reinforcement learning. Ensemble deep reinforcement learning is composed of multiple Soft Actor-Critic (SAC) and is utilized in reducing the variance of RL networks. By using a feedback controller in tandem the network exhibits stable performance in the early stages of training. As a preliminary step, we explore the viability of Hybrid LMC in controlling wheeled locomotion of a humanoid robot over a set of different physical parameters in MuJoCo simulator. Our results show that Hybrid LMC achieves better performance compared to other existing techniques and has increased sample efficiency
Hands-free Telelocomotion of a Wheeled Humanoid toward Dynamic Mobile Manipulation via Teleoperation
Mar 07, 2022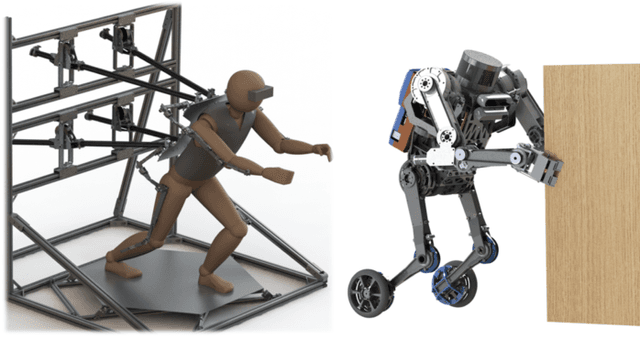
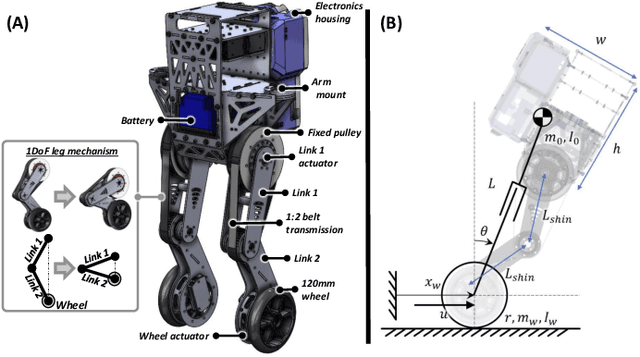
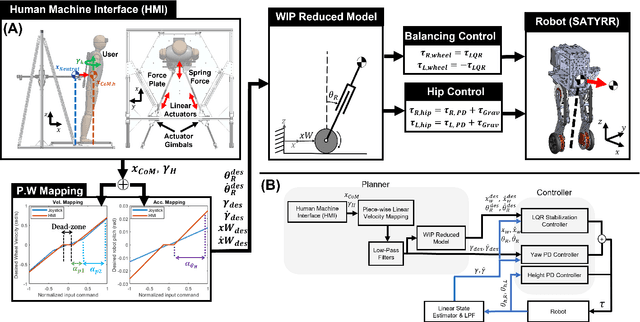
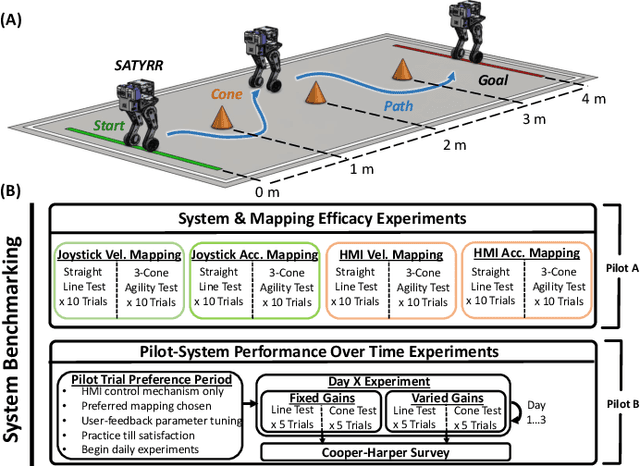
Robotic systems that can dynamically combine manipulation and locomotion could facilitate dangerous or physically demanding labor. For instance, firefighter humanoid robots could leverage their body by leaning against collapsed building rubble to push it aside. Here we introduce a teleoperation system that targets the realization of these tasks using human whole-body motor skills. We describe a new wheeled humanoid platform, SATYRR, and a novel hands-free teleoperation architecture using a whole-body Human Machine Interface (HMI). This system enables telelocomotion of the humanoid robot using the operator body motion, freeing their arms for manipulation tasks. In this study we evaluate the efficacy of the proposed system on hardware, and explore the control of SATYRR using two teleoperation mappings that map the operators body pitch and twist to the robot velocity or acceleration. Through experiments and user feedback we showcase our preliminary findings of the pilot-system response. Results suggest that the HMI is capable of effectively telelocomoting SATYRR, that pilot preferences should dictate the appropriate motion mapping and gains, and finally that the pilot can better learn to control the system over time. This study represents a fundamental step towards the realization of combined manipulation and locomotion via teleoperation.