 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLDLT L-Lipschitz Network Weight Parameterization Initialization
Jan 13, 2026We analyze initialization dynamics for LDLT-based $\mathcal{L}$-Lipschitz layers by deriving the exact marginal output variance when the underlying parameter matrix $W_0\in \mathbb{R}^{m\times n}$ is initialized with IID Gaussian entries $\mathcal{N}(0,σ^2)$. The Wishart distribution, $S=W_0W_0^\top\sim\mathcal{W}_m(n,σ^2 \boldsymbol{I}_m)$, used for computing the output marginal variance is derived in closed form using expectations of zonal polynomials via James' theorem and a Laplace-integral expansion of $(α\boldsymbol{I}_m+S)^{-1}$. We develop an Isserlis/Wick-based combinatorial expansion for $\operatorname{\mathbb{E}}\left[\operatorname{tr}(S^k)\right]$ and provide explicit truncated moments up to $k=10$, which yield accurate series approximations for small-to-moderate $σ^2$. Monte Carlo experiments confirm the theoretical estimates. Furthermore, empirical analysis was performed to quantify that, using current He or Kaiming initialization with scaling $1/\sqrt{n}$, the output variance is $0.41$, whereas the new parameterization with $10/ \sqrt{n}$ for $α=1$ results in an output variance of $0.9$. The findings clarify why deep $\mathcal{L}$-Lipschitz networks suffer rapid information loss at initialization and offer practical prescriptions for choosing initialization hyperparameters to mitigate this effect. However, using the Higgs boson classification dataset, a hyperparameter sweep over optimizers, initialization scale, and depth was conducted to validate the results on real-world data, showing that although the derivation ensures variance preservation, empirical results indicate He initialization still performs better.
In-Situ Soil-Property Estimation and Bayesian Mapping with a Simulated Compact Track Loader
Jul 30, 2025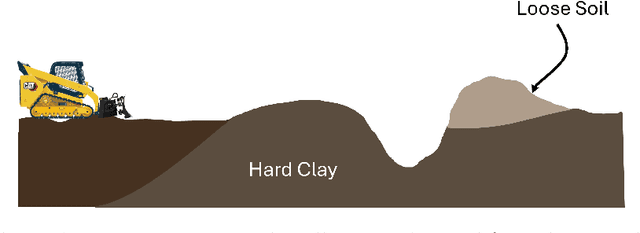
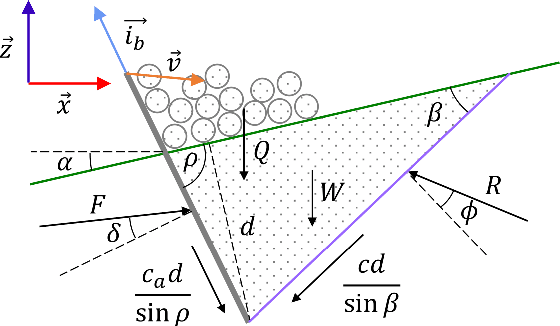
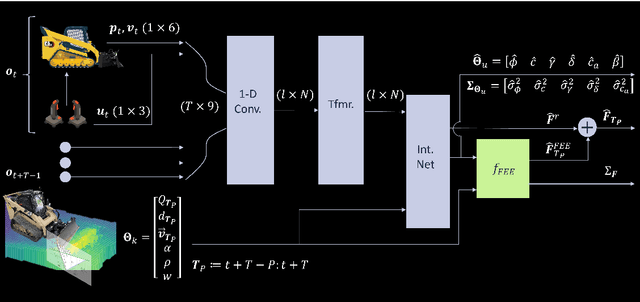
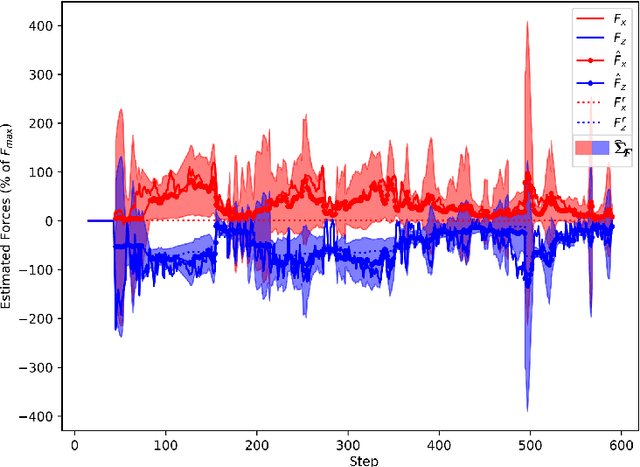
Existing earthmoving autonomy is largely confined to highly controlled and well-characterized environments due to the complexity of vehicle-terrain interaction dynamics and the partial observability of the terrain resulting from unknown and spatially varying soil conditions. In this chapter, a a soil-property mapping system is proposed to extend the environmental state, in order to overcome these restrictions and facilitate development of more robust autonomous earthmoving. A GPU accelerated elevation mapping system is extended to incorporate a blind mapping component which traces the movement of the blade through the terrain to displace and erode intersected soil, enabling separately tracking undisturbed and disturbed soil. Each interaction is approximated as a flat blade moving through a locally homogeneous soil, enabling modeling of cutting forces using the fundamental equation of earthmoving (FEE). Building upon our prior work on in situ soil-property estimation, a method is devised to extract approximate geometric parameters of the model given the uneven terrain, and an improved physics infused neural network (PINN) model is developed to predict soil properties and uncertainties of these estimates. A simulation of a compact track loader (CTL) with a blade attachment is used to collect data to train the PINN model. Post-training, the model is leveraged online by the mapping system to track soil property estimates spatially as separate layers in the map, with updates being performed in a Bayesian manner. Initial experiments show that the system accurately highlights regions requiring higher relative interaction forces, indicating the promise of this approach in enabling soil-aware planning for autonomous terrain shaping.
L-Lipschitz Gershgorin ResNet Network
Feb 28, 2025Deep residual networks (ResNets) have demonstrated outstanding success in computer vision tasks, attributed to their ability to maintain gradient flow through deep architectures. Simultaneously, controlling the Lipschitz bound in neural networks has emerged as an essential area of research for enhancing adversarial robustness and network certifiability. This paper uses a rigorous approach to design $\mathcal{L}$-Lipschitz deep residual networks using a Linear Matrix Inequality (LMI) framework. The ResNet architecture was reformulated as a pseudo-tri-diagonal LMI with off-diagonal elements and derived closed-form constraints on network parameters to ensure $\mathcal{L}$-Lipschitz continuity. To address the lack of explicit eigenvalue computations for such matrix structures, the Gershgorin circle theorem was employed to approximate eigenvalue locations, guaranteeing the LMI's negative semi-definiteness. Our contributions include a provable parameterization methodology for constructing Lipschitz-constrained networks and a compositional framework for managing recursive systems within hierarchical architectures. These findings enable robust network designs applicable to adversarial robustness, certified training, and control systems. However, a limitation was identified in the Gershgorin-based approximations, which over-constrain the system, suppressing non-linear dynamics and diminishing the network's expressive capacity.
Cooperative Modular Manipulation with Numerous Cable-Driven Robots for Assistive Construction and Gap Crossing
Mar 19, 2024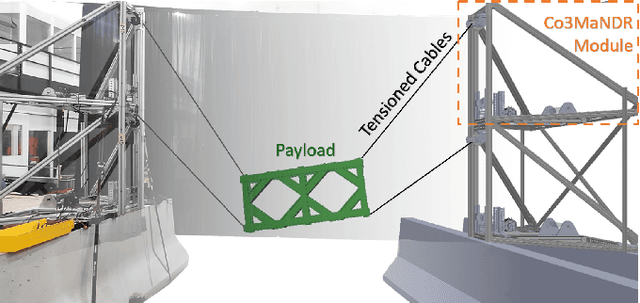
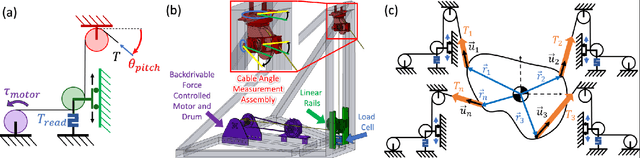
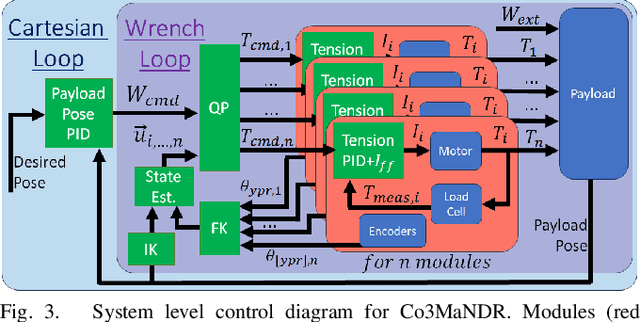
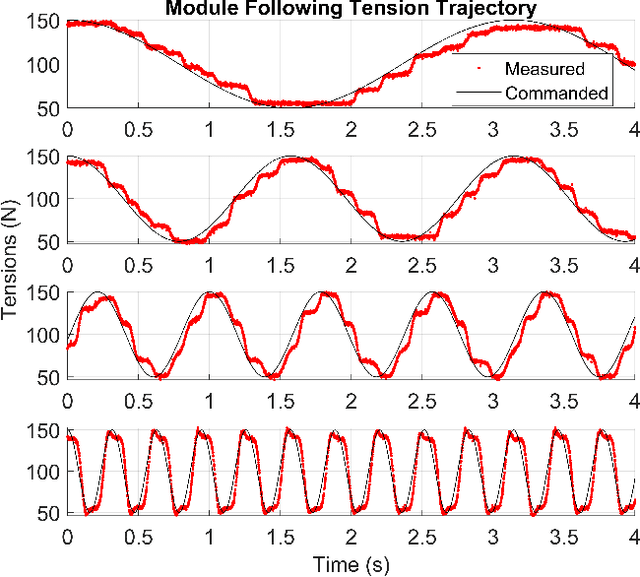
Soldiers in the field often need to cross negative obstacles, such as rivers or canyons, to reach goals or safety. Military gap crossing involves on-site temporary bridges construction. However, this procedure is conducted with dangerous, time and labor intensive operations, and specialized machinery. We envision a scalable robotic solution inspired by advancements in force-controlled and Cable Driven Parallel Robots (CDPRs); this solution can address the challenges inherent in this transportation problem, achieving fast, efficient, and safe deployment and field operations. We introduce the embodied vision in Co3MaNDR, a solution to the military gap crossing problem, a distributed robot consisting of several modules simultaneously pulling on a central payload, controlling the cables' tensions to achieve complex objectives, such as precise trajectory tracking or force amplification. Hardware experiments demonstrate teleoperation of a payload, trajectory following, and the sensing and amplification of operators' applied physical forces during slow operations. An operator was shown to manipulate a 27.2 kg (60 lb) payload with an average force utilization of 14.5\% of its weight. Results indicate that the system can be scaled up to heavier payloads without compromising performance or introducing superfluous complexity. This research lays a foundation to expand CDPR technology to uncoordinated and unstable mobile platforms in unknown environments.
In Situ Soil Property Estimation for Autonomous Earthmoving Using Physics-Infused Neural Networks
Sep 05, 2023



A novel, learning-based method for in situ estimation of soil properties using a physics-infused neural network (PINN) is presented. The network is trained to produce estimates of soil cohesion, angle of internal friction, soil-tool friction, soil failure angle, and residual depth of cut which are then passed through an earthmoving model based on the fundamental equation of earthmoving (FEE) to produce an estimated force. The network ingests a short history of kinematic observations along with past control commands and predicts interaction forces accurately with average error of less than 2kN, 13% of the measured force. To validate the approach, an earthmoving simulation of a bladed vehicle is developed using Vortex Studio, enabling comparison of the estimated parameters to pseudo-ground-truth values which is challenging in real-world experiments. The proposed approach is shown to enable accurate estimation of interaction forces and produces meaningful parameter estimates even when the model and the environmental physics deviate substantially.
A Robust Localization Solution for an Uncrewed Ground Vehicle in Unstructured Outdoor GNSS-Denied Environments
Sep 05, 2023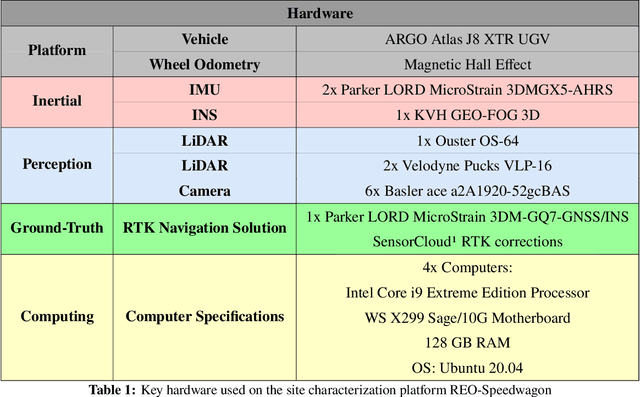
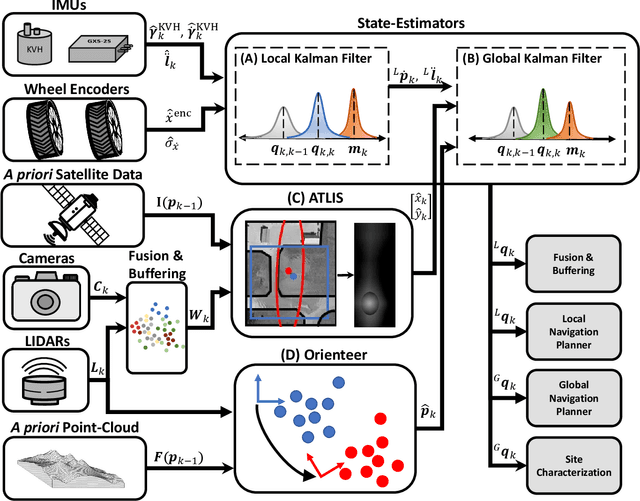
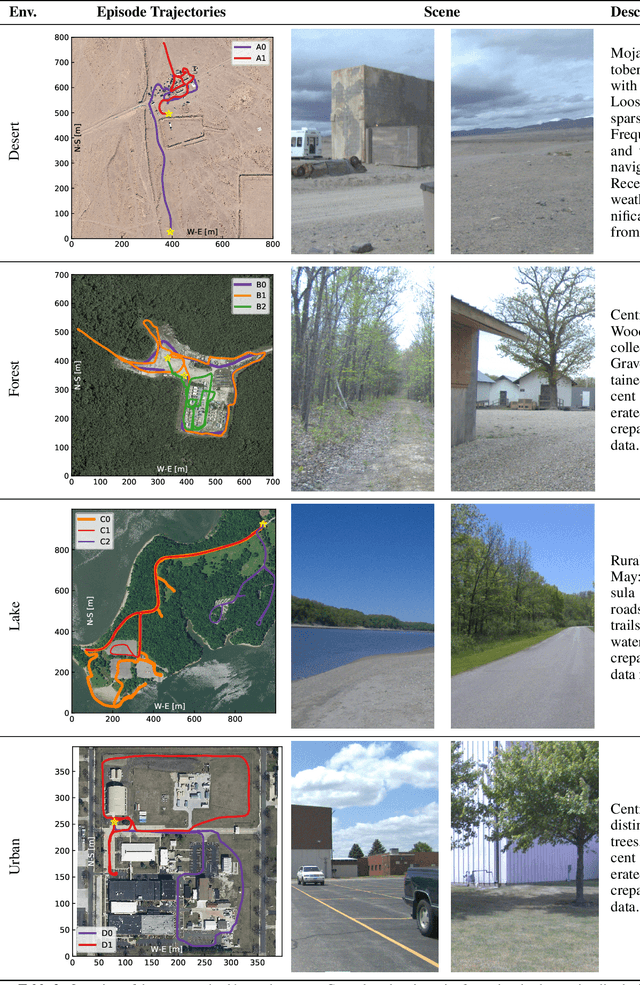
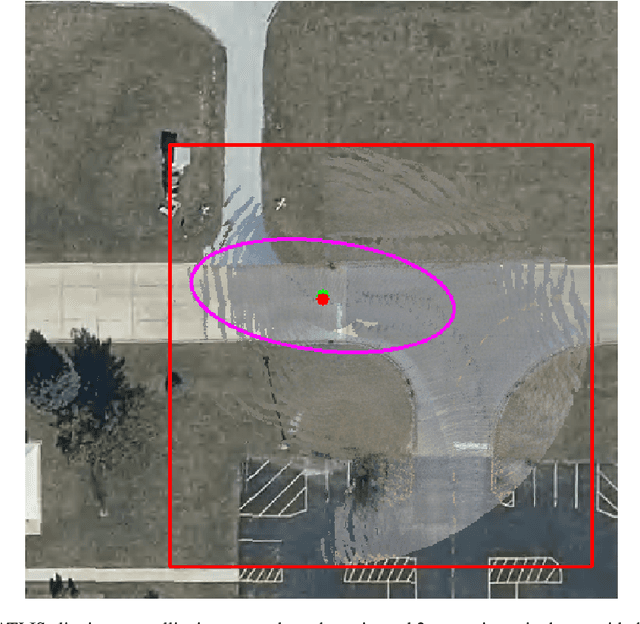
This work addresses the challenge of developing a localization system for an uncrewed ground vehicle (UGV) operating autonomously in unstructured outdoor Global Navigation Satellite System (GNSS)-denied environments. The goal is to enable accurate mapping and long-range navigation with practical applications in domains such as autonomous construction, military engineering missions, and exploration of non-Earth planets. The proposed system - Terrain-Referenced Assured Engineer Localization System (TRAELS) - integrates pose estimates produced by two complementary terrain referenced navigation (TRN) methods with wheel odometry and inertial measurement unit (IMU) measurements using an Extended Kalman Filter (EKF). Unlike simultaneous localization and mapping (SLAM) systems that require loop closures, the described approach maintains accuracy over long distances and one-way missions without the need to revisit previous positions. Evaluation of TRAELS is performed across a range of environments. In regions where a combination of distinctive geometric and ground surface features are present, the developed TRN methods are leveraged by TRAELS to consistently achieve an absolute trajectory error of less than 3.0 m. The approach is also shown to be capable of recovering from large accumulated drift when traversing feature-sparse areas, which is essential in ensuring robust performance of the system across a wide variety of challenging GNSS-denied environments. Overall, the effectiveness of the system in providing precise localization and mapping capabilities in challenging GNSS-denied environments is demonstrated and an analysis is performed leading to insights for improving TRN approaches for UGVs.