 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Modular Manipulation with Numerous Cable-Driven Robots for Assistive Construction and Gap Crossing
Paper and Code
Mar 19, 2024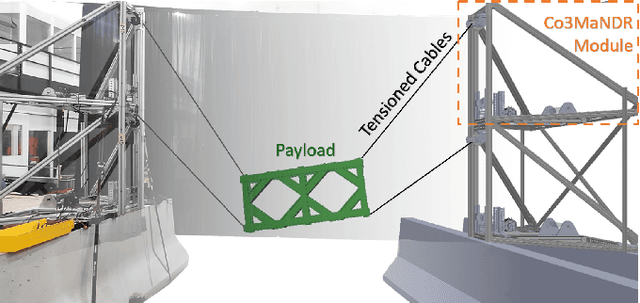
Soldiers in the field often need to cross negative obstacles, such as rivers or canyons, to reach goals or safety. Military gap crossing involves on-site temporary bridges construction. However, this procedure is conducted with dangerous, time and labor intensive operations, and specialized machinery. We envision a scalable robotic solution inspired by advancements in force-controlled and Cable Driven Parallel Robots (CDPRs); this solution can address the challenges inherent in this transportation problem, achieving fast, efficient, and safe deployment and field operations. We introduce the embodied vision in Co3MaNDR, a solution to the military gap crossing problem, a distributed robot consisting of several modules simultaneously pulling on a central payload, controlling the cables' tensions to achieve complex objectives, such as precise trajectory tracking or force amplification. Hardware experiments demonstrate teleoperation of a payload, trajectory following, and the sensing and amplification of operators' applied physical forces during slow operations. An operator was shown to manipulate a 27.2 kg (60 lb) payload with an average force utilization of 14.5\% of its weight. Results indicate that the system can be scaled up to heavier payloads without compromising performance or introducing superfluous complexity. This research lays a foundation to expand CDPR technology to uncoordinated and unstable mobile platforms in unknown environments.