 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Mobile Manipulation via Whole-Body Bilateral Teleoperation of a Wheeled Humanoid
Jul 03, 2023



Humanoid robots have the potential to help human workers by realizing physically demanding manipulation tasks such as moving large boxes within warehouses. We define such tasks as Dynamic Mobile Manipulation (DMM). This paper presents a framework for DMM via whole-body teleoperation, built upon three key contributions: Firstly, a teleoperation framework employing a Human Machine Interface (HMI) and a bi-wheeled humanoid, SATYRR, is proposed. Secondly, the study introduces a dynamic locomotion mapping, utilizing human-robot reduced order models, and a kinematic retargeting strategy for manipulation tasks. Additionally, the paper discusses the role of whole-body haptic feedback for wheeled humanoid control. Finally, the system's effectiveness and mappings for DMM are validated through locomanipulation experiments and heavy box pushing tasks. Here we show two forms of DMM: grasping a target moving at an average speed of 0.4 m/s, and pushing boxes weighing up to 105\% of the robot's weight. By simultaneously adjusting their pitch and using their arms, the pilot adjusts the robot pose to apply larger contact forces and move a heavy box at a constant velocity of 0.2 m/s.
Hands-free Telelocomotion of a Wheeled Humanoid toward Dynamic Mobile Manipulation via Teleoperation
Mar 07, 2022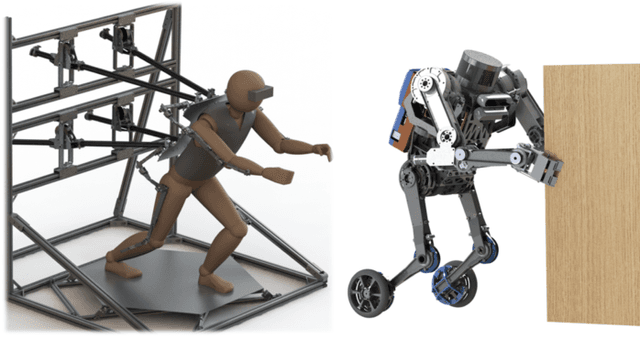
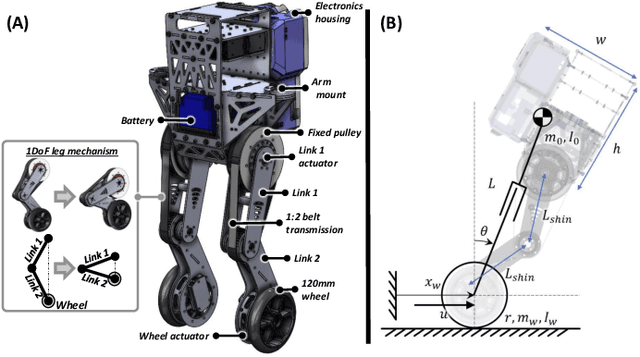
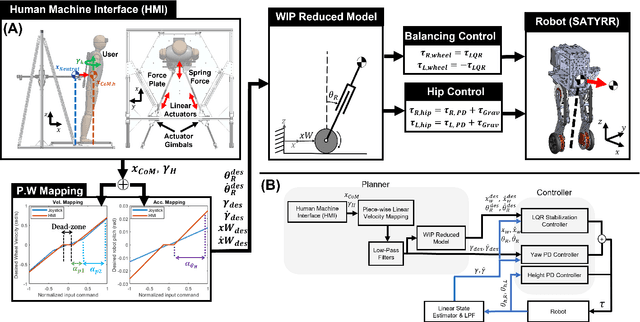
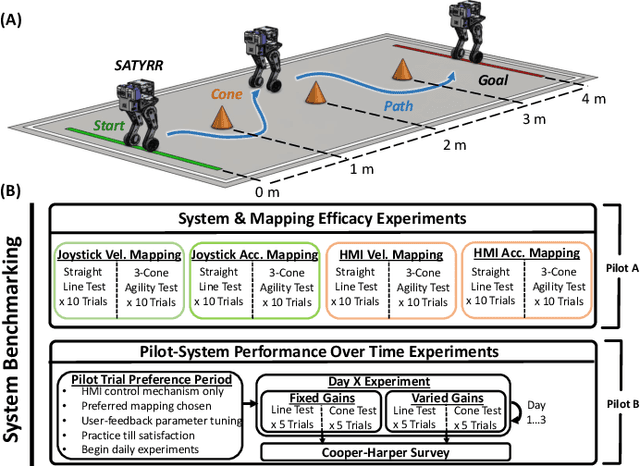
Robotic systems that can dynamically combine manipulation and locomotion could facilitate dangerous or physically demanding labor. For instance, firefighter humanoid robots could leverage their body by leaning against collapsed building rubble to push it aside. Here we introduce a teleoperation system that targets the realization of these tasks using human whole-body motor skills. We describe a new wheeled humanoid platform, SATYRR, and a novel hands-free teleoperation architecture using a whole-body Human Machine Interface (HMI). This system enables telelocomotion of the humanoid robot using the operator body motion, freeing their arms for manipulation tasks. In this study we evaluate the efficacy of the proposed system on hardware, and explore the control of SATYRR using two teleoperation mappings that map the operators body pitch and twist to the robot velocity or acceleration. Through experiments and user feedback we showcase our preliminary findings of the pilot-system response. Results suggest that the HMI is capable of effectively telelocomoting SATYRR, that pilot preferences should dictate the appropriate motion mapping and gains, and finally that the pilot can better learn to control the system over time. This study represents a fundamental step towards the realization of combined manipulation and locomotion via teleoperation.
A Large Force Haptic Interface with Modular Linear Actuators
Mar 07, 2022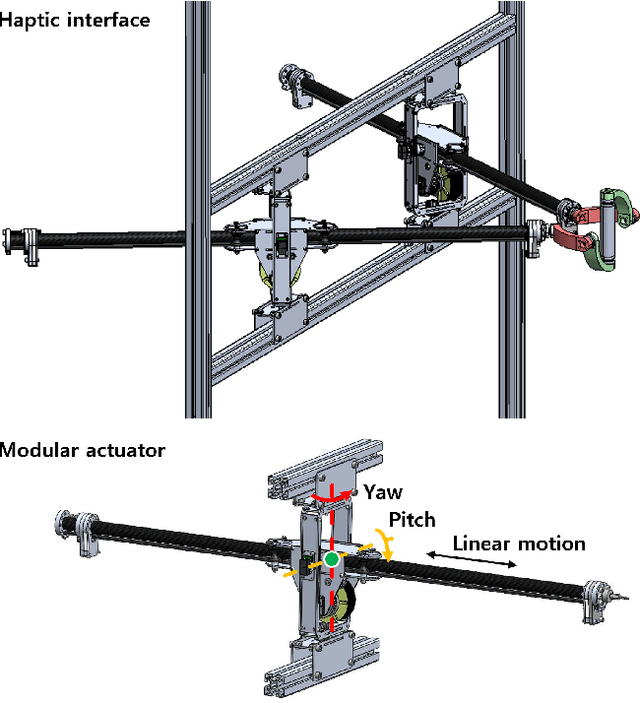
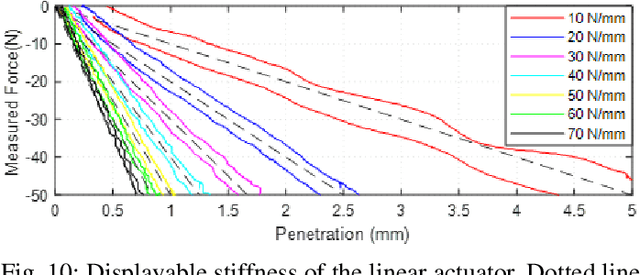
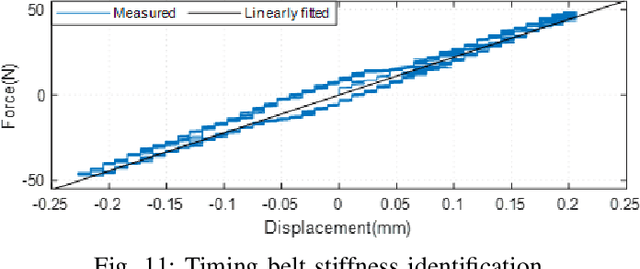
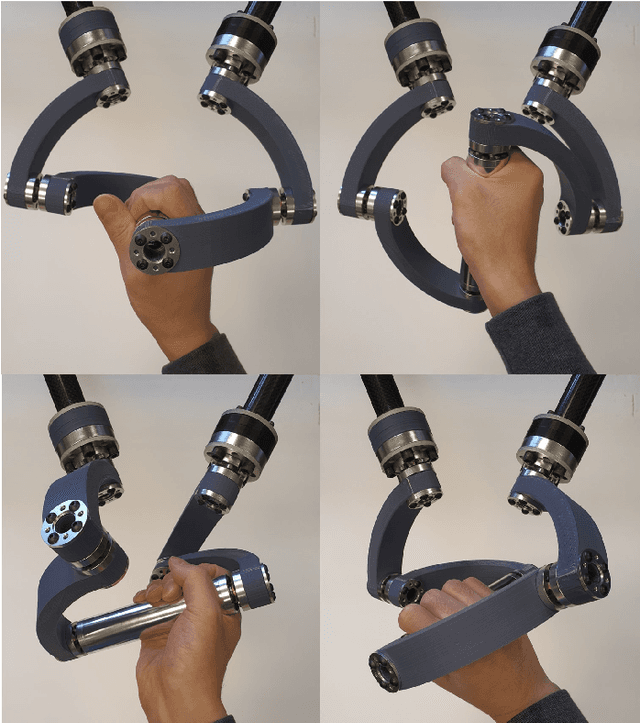
This paper presents a haptic interface with modular linear actuators which can address limitations of conventional devices based on rotatory joints. The proposed haptic interface is composed of parallel linear actuators that provide high backdrivability and small inertia. The performance of the haptic interface is compared with the conventional mechanisms in terms of force capability, reflected inertia, and structural stiffness. High stiffness, large range of motion with high force capability are achieved with the proposed mechanism, which are in trade-off relationships in traditional haptic interfaces. The device can apply up to 83 N continuously, which is three times larger than most haptic devices. The theoretical minimum haptic force density and the stiffness of the proposed mechanism were 1.3 to 1.9 times and 37 times of conventional mechanisms in a similar condition, respectively. The system is also scalable because its structural stiffness only depends on the timing belt stiffness, while that of conventional haptic interfaces is inversely proportional to the cube of structural lengths. The modular actuator design enables change of degrees freedom (DOFs) for different applications. The proposed haptic interface was tested by the interaction experiment with a virtual environment with rigid walls.