 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHands-free Telelocomotion of a Wheeled Humanoid toward Dynamic Mobile Manipulation via Teleoperation
Paper and Code
Mar 07, 2022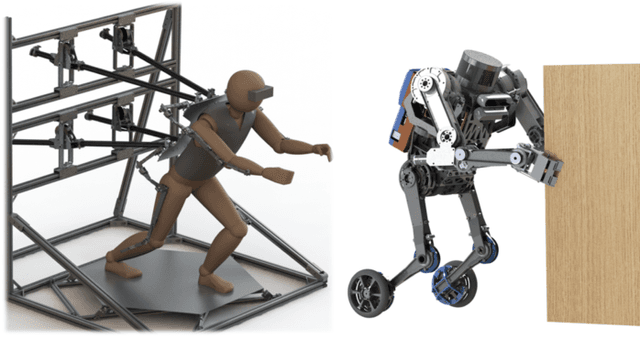
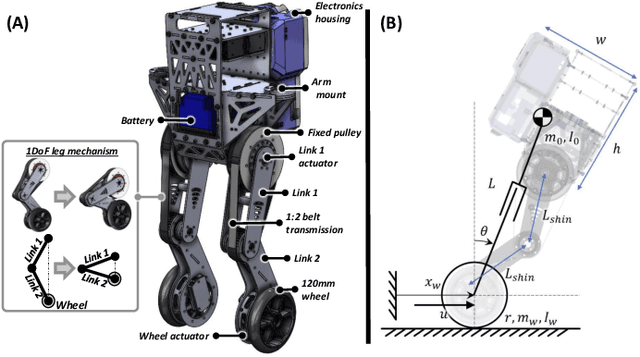
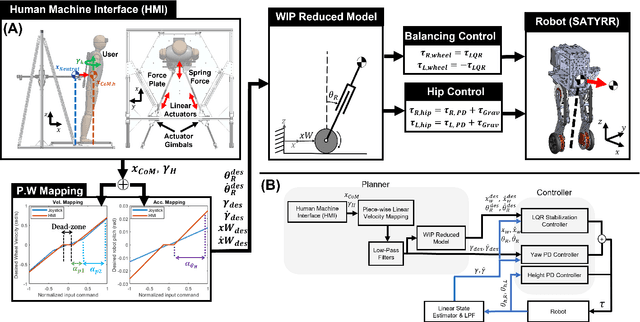
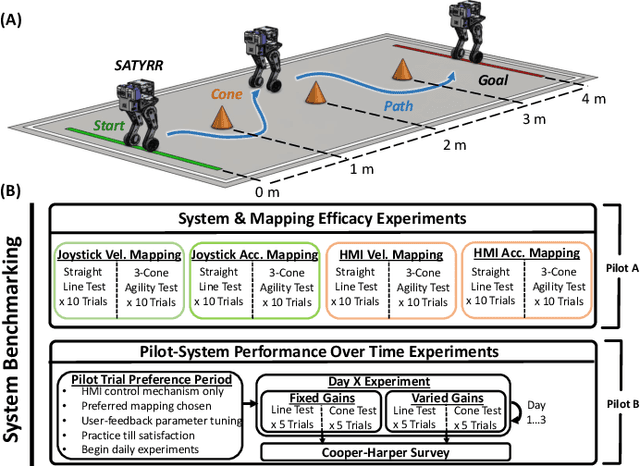
Robotic systems that can dynamically combine manipulation and locomotion could facilitate dangerous or physically demanding labor. For instance, firefighter humanoid robots could leverage their body by leaning against collapsed building rubble to push it aside. Here we introduce a teleoperation system that targets the realization of these tasks using human whole-body motor skills. We describe a new wheeled humanoid platform, SATYRR, and a novel hands-free teleoperation architecture using a whole-body Human Machine Interface (HMI). This system enables telelocomotion of the humanoid robot using the operator body motion, freeing their arms for manipulation tasks. In this study we evaluate the efficacy of the proposed system on hardware, and explore the control of SATYRR using two teleoperation mappings that map the operators body pitch and twist to the robot velocity or acceleration. Through experiments and user feedback we showcase our preliminary findings of the pilot-system response. Results suggest that the HMI is capable of effectively telelocomoting SATYRR, that pilot preferences should dictate the appropriate motion mapping and gains, and finally that the pilot can better learn to control the system over time. This study represents a fundamental step towards the realization of combined manipulation and locomotion via teleoperation.