Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSteerable rolling of a 1-DoF robot using an internal pendulum
Apr 16, 2025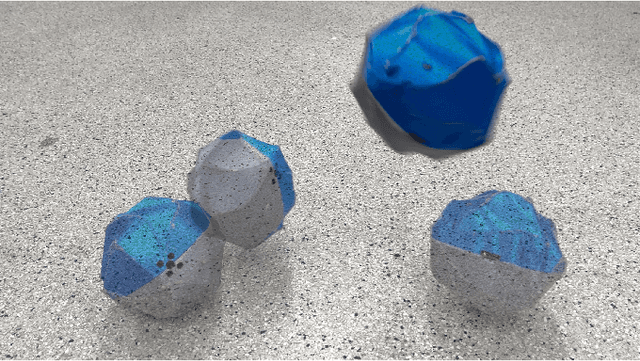
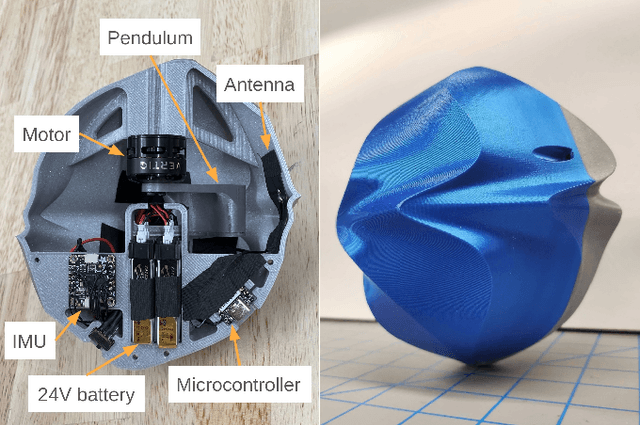
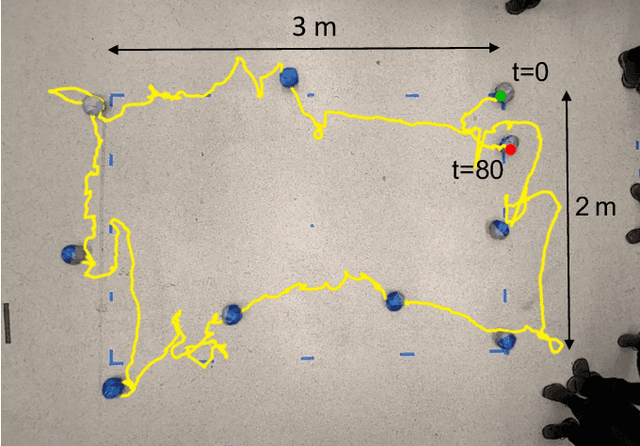
We present ROCK (Rolling One-motor Controlled rocK), a 1 degree-of-freedom robot consisting of a round shell and an internal pendulum. An uneven shell surface enables steering by using only the movement of the pendulum, allowing for mechanically simple designs that may be feasible to scale to large quantities or small sizes. We train a control policy using reinforcement learning in simulation and deploy it onto the robot to complete a rectangular trajectory.
* 2 pages, submitted to 2nd Unconventional Robots Workshop: Rethinking
Robotic Systems Beyond Convention at IEEE ICRA 2025
Via