 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl- & Task-Aware Optimal Design of Actuation System for Legged Robots using Binary Integer Linear Programming
Jul 21, 2023Athletic robots demand a whole-body actuation system design that utilizes motors up to the boundaries of their performance. However, creating such robots poses challenges of integrating design principles and reasoning of practical design choices. This paper presents a design framework that guides designers to find optimal design choices to create an actuation system that can rapidly generate torques and velocities required to achieve a given set of tasks, by minimizing inertia and leveraging cooperation between actuators. The framework serves as an interactive tool for designers who are in charge of providing design rules and candidate components such as motors, reduction mechanism, and coupling mechanisms between actuators and joints. A binary integer linear optimization explores design combinations to find optimal components that can achieve a set of tasks. The framework is demonstrated with 200 optimal design studies of a biped with 5-degree-of-freedom (DoF) legs, focusing on the effect of achieving multiple tasks (walking, lifting), constraining the mass budget of all motors in the system and the use of coupling mechanisms. The result provides a comprehensive view of how design choices and rules affect reflected inertia, copper loss of motors, and force capability of optimal actuation systems.
Whole-Body Dynamic Telelocomotion: A Step-to-Step Dynamics Approach to Human Walking Reference Generation
Jul 21, 2023Teleoperated humanoid robots hold significant potential as physical avatars for humans in hazardous and inaccessible environments, with the goal of channeling human intelligence and sensorimotor skills through these robotic counterparts. Precise coordination between humans and robots is crucial for accomplishing whole-body behaviors involving locomotion and manipulation. To progress successfully, dynamic synchronization between humans and humanoid robots must be achieved. This work enhances advancements in whole-body dynamic telelocomotion, addressing challenges in robustness. By embedding the hybrid and underactuated nature of bipedal walking into a virtual human walking interface, we achieve dynamically consistent walking gait generation. Additionally, we integrate a reactive robot controller into a whole-body dynamic telelocomotion framework. Thus, allowing the realization of telelocomotion behaviors on the full-body dynamics of a bipedal robot. Real-time telelocomotion simulation experiments validate the effectiveness of our methods, demonstrating that a trained human pilot can dynamically synchronize with a simulated bipedal robot, achieving sustained locomotion, controlling walking speeds within the range of 0.0 m/s to 0.3 m/s, and enabling backward walking for distances of up to 2.0 m. This research contributes to advancing teleoperated humanoid robots and paves the way for future developments in synchronized locomotion between humans and bipedal robots.
Bipedal Robot Walking Control Using Human Whole-Body Dynamic Telelocomotion
Sep 14, 2022
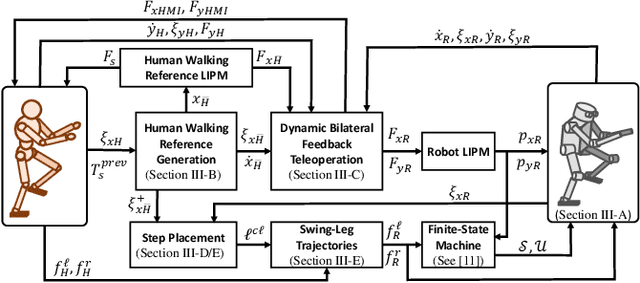


For humanoids to be deployed in demanding situations, such as search and rescue, highly intelligent decision making and proficient sensorimotor skill is expected. A promising solution is to leverage human prowess by interconnecting robot and human via teleoperation. Towards creating seamless operation, this paper presents a dynamic telelocomotion framework that synchronizes the gait of a human pilot with the walking of a bipedal robot. First, we introduce a method to generate a virtual human walking model from the stepping behavior of a human pilot which serves as a reference for the robot to walk. Second, the dynamics of the walking reference and robot walking are synchronized by applying forces to the human pilot and the robot to achieve dynamic similarity between the two systems. This enables the human pilot to continuously perceive and cancel any asynchrony between the walking reference and robot. A consistent step placement strategy for the robot is derived to maintain dynamic similarity through step transitions. Using our human-machine-interface, we demonstrate that the human pilot can achieve stable and synchronous teleoperation of a simulated robot through stepping-in-place, walking, and disturbance rejection experiments. This work provides a fundamental step towards transferring human intelligence and reflexes to humanoid robots.