 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiG-Avatar: Hierarchical Neural-Field-Guided Gaussian Avatars
May 20, 2026Existing Gaussian avatar methods typically parameterize geometry on a body-template surface, which entangles the avatar's representation space with the template's deformation space and limits the capture of layered, off-body, and non-rigid clothing geometry. We present PiG-Avatar, which addresses this limitation by using the parametric body model solely for kinematic transport, while representing the avatar as Gaussians anchored in a volumetric canonical space governed by a continuous neural field. This decouples representation from template topology, avoiding the geometric constraints of surface-based parameterizations. Kinematic coherence is maintained through 3D barycentric anchor transport, which guides motion without constraining geometry and allows anchors to deviate freely from the template surface, yielding dense, stable temporal surface correspondences by construction. To make this unconstrained formulation tractable, we introduce dual-level spatially coherent optimization, combining Sobolev-preconditioned neural-field updates with a novel KNN-based preconditioning of canonical anchor geometry. Together, these mechanisms induce an emergent self-organization of anchor density: anchors migrate toward regions of high curvature, appearance variation, and non-coherent motion without explicit heuristics. As a result, complex clothing geometry and layered surfaces emerge as natural, high-fidelity outputs. This single representation further supports hierarchical reconstruction across multiple levels of detail, with coarse-level supervision propagating to finer levels through the shared field and coupled anchor graph. On established benchmarks featuring subjects with complex clothing and challenging non-rigid motion, PiG-Avatar achieves state-of-the-art rendering quality, generalizes robustly to imperfect body model initialization, and renders in real time across all detail levels.
Transformer-Based Inpainting for Real-Time 3D Streaming in Sparse Multi-Camera Setups
Mar 05, 2026High-quality 3D streaming from multiple cameras is crucial for immersive experiences in many AR/VR applications. The limited number of views - often due to real-time constraints - leads to missing information and incomplete surfaces in the rendered images. Existing approaches typically rely on simple heuristics for the hole filling, which can result in inconsistencies or visual artifacts. We propose to complete the missing textures using a novel, application-targeted inpainting method independent of the underlying representation as an image-based post-processing step after the novel view rendering. The method is designed as a standalone module compatible with any calibrated multi-camera system. For this we introduce a multi-view aware, transformer-based network architecture using spatio-temporal embeddings to ensure consistency across frames while preserving fine details. Additionally, our resolution-independent design allows adaptation to different camera setups, while an adaptive patch selection strategy balances inference speed and quality, allowing real-time performance. We evaluate our approach against state-of-the-art inpainting techniques under the same real-time constraints and demonstrate that our model achieves the best trade-off between quality and speed, outperforming competitors in both image and video-based metrics.
Neu-PiG: Neural Preconditioned Grids for Fast Dynamic Surface Reconstruction on Long Sequences
Feb 25, 2026Temporally consistent surface reconstruction of dynamic 3D objects from unstructured point cloud data remains challenging, especially for very long sequences. Existing methods either optimize deformations incrementally, risking drift and requiring long runtimes, or rely on complex learned models that demand category-specific training. We present Neu-PiG, a fast deformation optimization method based on a novel preconditioned latent-grid encoding that distributes spatial features parameterized on the position and normal direction of a keyframe surface. Our method encodes entire deformations across all time steps at various spatial scales into a multi-resolution latent grid, parameterized by the position and normal direction of a reference surface from a single keyframe. This latent representation is then augmented for time modulation and decoded into per-frame 6-DoF deformations via a lightweight multilayer perceptron (MLP). To achieve high-fidelity, drift-free surface reconstructions in seconds, we employ Sobolev preconditioning during gradient-based training of the latent space, completely avoiding the need for any explicit correspondences or further priors. Experiments across diverse human and animal datasets demonstrate that Neu-PiG outperforms state-the-art approaches, offering both superior accuracy and scalability to long sequences while running at least 60x faster than existing training-free methods and achieving inference speeds on the same order as heavy pretrained models.
Moment-Based 3D Gaussian Splatting: Resolving Volumetric Occlusion with Order-Independent Transmittance
Dec 12, 2025
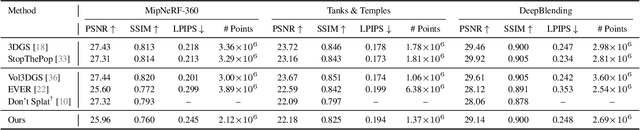

The recent success of 3D Gaussian Splatting (3DGS) has reshaped novel view synthesis by enabling fast optimization and real-time rendering of high-quality radiance fields. However, it relies on simplified, order-dependent alpha blending and coarse approximations of the density integral within the rasterizer, thereby limiting its ability to render complex, overlapping semi-transparent objects. In this paper, we extend rasterization-based rendering of 3D Gaussian representations with a novel method for high-fidelity transmittance computation, entirely avoiding the need for ray tracing or per-pixel sample sorting. Building on prior work in moment-based order-independent transparency, our key idea is to characterize the density distribution along each camera ray with a compact and continuous representation based on statistical moments. To this end, we analytically derive and compute a set of per-pixel moments from all contributing 3D Gaussians. From these moments, a continuous transmittance function is reconstructed for each ray, which is then independently sampled within each Gaussian. As a result, our method bridges the gap between rasterization and physical accuracy by modeling light attenuation in complex translucent media, significantly improving overall reconstruction and rendering quality.
ROSA: Reconstructing Object Shape and Appearance Textures by Adaptive Detail Transfer
Jan 30, 2025



Reconstructing an object's shape and appearance in terms of a mesh textured by a spatially-varying bidirectional reflectance distribution function (SVBRDF) from a limited set of images captured under collocated light is an ill-posed problem. Previous state-of-the-art approaches either aim to reconstruct the appearance directly on the geometry or additionally use texture normals as part of the appearance features. However, this requires detailed but inefficiently large meshes, that would have to be simplified in a post-processing step, or suffers from well-known limitations of normal maps such as missing shadows or incorrect silhouettes. Another limiting factor is the fixed and typically low resolution of the texture estimation resulting in loss of important surface details. To overcome these problems, we present ROSA, an inverse rendering method that directly optimizes mesh geometry with spatially adaptive mesh resolution solely based on the image data. In particular, we refine the mesh and locally condition the surface smoothness based on the estimated normal texture and mesh curvature. In addition, we enable the reconstruction of fine appearance details in high-resolution textures through a pioneering tile-based method that operates on a single pre-trained decoder network but is not limited by the network output resolution.
NeRFs are Mirror Detectors: Using Structural Similarity for Multi-View Mirror Scene Reconstruction with 3D Surface Primitives
Jan 07, 2025



While neural radiance fields (NeRF) led to a breakthrough in photorealistic novel view synthesis, handling mirroring surfaces still denotes a particular challenge as they introduce severe inconsistencies in the scene representation. Previous attempts either focus on reconstructing single reflective objects or rely on strong supervision guidance in terms of additional user-provided annotations of visible image regions of the mirrors, thereby limiting the practical usability. In contrast, in this paper, we present NeRF-MD, a method which shows that NeRFs can be considered as mirror detectors and which is capable of reconstructing neural radiance fields of scenes containing mirroring surfaces without the need for prior annotations. To this end, we first compute an initial estimate of the scene geometry by training a standard NeRF using a depth reprojection loss. Our key insight lies in the fact that parts of the scene corresponding to a mirroring surface will still exhibit a significant photometric inconsistency, whereas the remaining parts are already reconstructed in a plausible manner. This allows us to detect mirror surfaces by fitting geometric primitives to such inconsistent regions in this initial stage of the training. Using this information, we then jointly optimize the radiance field and mirror geometry in a second training stage to refine their quality. We demonstrate the capability of our method to allow the faithful detection of mirrors in the scene as well as the reconstruction of a single consistent scene representation, and demonstrate its potential in comparison to baseline and mirror-aware approaches.
RHINO-VR Experience: Teaching Mobile Robotics Concepts in an Interactive Museum Exhibit
Mar 22, 2024



In 1997, the very first tour guide robot RHINO was deployed in a museum in Germany. With the ability to navigate autonomously through the environment, the robot gave tours to over 2,000 visitors. Today, RHINO itself has become an exhibit and is no longer operational. In this paper, we present RHINO-VR, an interactive museum exhibit using virtual reality (VR) that allows museum visitors to experience the historical robot RHINO in operation in a virtual museum. RHINO-VR, unlike static exhibits, enables users to familiarize themselves with basic mobile robotics concepts without the fear of damaging the exhibit. In the virtual environment, the user is able to interact with RHINO in VR by pointing to a location to which the robot should navigate and observing the corresponding actions of the robot. To include other visitors who cannot use the VR, we provide an external observation view to make RHINO visible to them. We evaluated our system by measuring the frame rate of the VR simulation, comparing the generated virtual 3D models with the originals, and conducting a user study. The user-study showed that RHINO-VR improved the visitors' understanding of the robot's functionality and that they would recommend experiencing the VR exhibit to others.
FPO++: Efficient Encoding and Rendering of Dynamic Neural Radiance Fields by Analyzing and Enhancing Fourier PlenOctrees
Oct 31, 2023Fourier PlenOctrees have shown to be an efficient representation for real-time rendering of dynamic Neural Radiance Fields (NeRF). Despite its many advantages, this method suffers from artifacts introduced by the involved compression when combining it with recent state-of-the-art techniques for training the static per-frame NeRF models. In this paper, we perform an in-depth analysis of these artifacts and leverage the resulting insights to propose an improved representation. In particular, we present a novel density encoding that adapts the Fourier-based compression to the characteristics of the transfer function used by the underlying volume rendering procedure and leads to a substantial reduction of artifacts in the dynamic model. Furthermore, we show an augmentation of the training data that relaxes the periodicity assumption of the compression. We demonstrate the effectiveness of our enhanced Fourier PlenOctrees in the scope of quantitative and qualitative evaluations on synthetic and real-world scenes.
TraM-NeRF: Tracing Mirror and Near-Perfect Specular Reflections through Neural Radiance Fields
Oct 16, 2023Implicit representations like Neural Radiance Fields (NeRF) showed impressive results for photorealistic rendering of complex scenes with fine details. However, ideal or near-perfectly specular reflecting objects such as mirrors, which are often encountered in various indoor scenes, impose ambiguities and inconsistencies in the representation of the reconstructed scene leading to severe artifacts in the synthesized renderings. In this paper, we present a novel reflection tracing method tailored for the involved volume rendering within NeRF that takes these mirror-like objects into account while avoiding the cost of straightforward but expensive extensions through standard path tracing. By explicitly modeling the reflection behavior using physically plausible materials and estimating the reflected radiance with Monte-Carlo methods within the volume rendering formulation, we derive efficient strategies for importance sampling and the transmittance computation along rays from only few samples. We show that our novel method enables the training of consistent representations of such challenging scenes and achieves superior results in comparison to previous state-of-the-art approaches.
Efficient 3D Reconstruction, Streaming and Visualization of Static and Dynamic Scene Parts for Multi-client Live-telepresence in Large-scale Environments
Nov 25, 2022
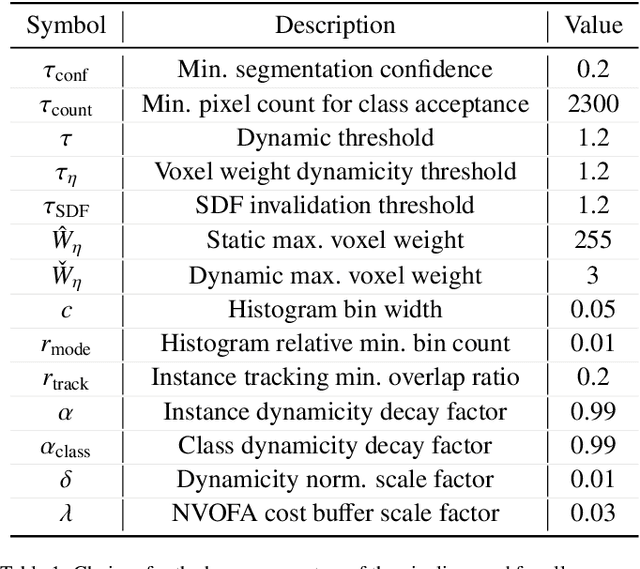

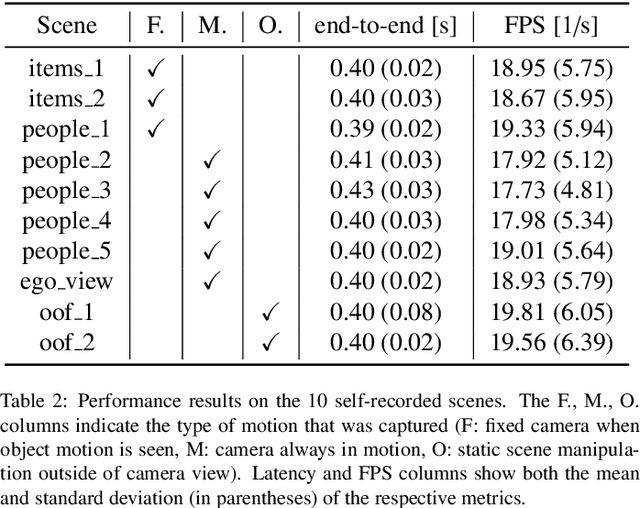
Despite the impressive progress of telepresence systems for room-scale scenes with static and dynamic scene entities, expanding their capabilities to scenarios with larger dynamic environments beyond a fixed size of a few squaremeters remains challenging. In this paper, we aim at sharing 3D live-telepresence experiences in large-scale environments beyond room scale with both static and dynamic scene entities at practical bandwidth requirements only based on light-weight scene capture with a single moving consumer-grade RGB-D camera. To this end, we present a system which is built upon a novel hybrid volumetric scene representation in terms of the combination of a voxel-based scene representation for the static contents, that not only stores the reconstructed surface geometry but also contains information about the object semantics as well as their accumulated dynamic movement over time, and a point-cloud-based representation for dynamic scene parts, where the respective separation from static parts is achieved based on semantic and instance information extracted for the input frames. With an independent yet simultaneous streaming of both static and dynamic content, where we seamlessly integrate potentially moving but currently static scene entities in the static model until they are becoming dynamic again, as well as the fusion of static and dynamic data at the remote client, our system is able to achieve VR-based live-telepresence at interactive rates. Our evaluation demonstrates the potential of our novel approach in terms of visual quality, performance, and ablation studies regarding involved design choices.