 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Free-Viewpoint Relighting for Glossy Indirect Illumination
Jul 12, 2023Precomputed Radiance Transfer (PRT) remains an attractive solution for real-time rendering of complex light transport effects such as glossy global illumination. After precomputation, we can relight the scene with new environment maps while changing viewpoint in real-time. However, practical PRT methods are usually limited to low-frequency spherical harmonic lighting. All-frequency techniques using wavelets are promising but have so far had little practical impact. The curse of dimensionality and much higher data requirements have typically limited them to relighting with fixed view or only direct lighting with triple product integrals. In this paper, we demonstrate a hybrid neural-wavelet PRT solution to high-frequency indirect illumination, including glossy reflection, for relighting with changing view. Specifically, we seek to represent the light transport function in the Haar wavelet basis. For global illumination, we learn the wavelet transport using a small multi-layer perceptron (MLP) applied to a feature field as a function of spatial location and wavelet index, with reflected direction and material parameters being other MLP inputs. We optimize/learn the feature field (compactly represented by a tensor decomposition) and MLP parameters from multiple images of the scene under different lighting and viewing conditions. We demonstrate real-time (512 x 512 at 24 FPS, 800 x 600 at 13 FPS) precomputed rendering of challenging scenes involving view-dependent reflections and even caustics.
Sim2Real for Self-Supervised Monocular Depth and Segmentation
Dec 01, 2020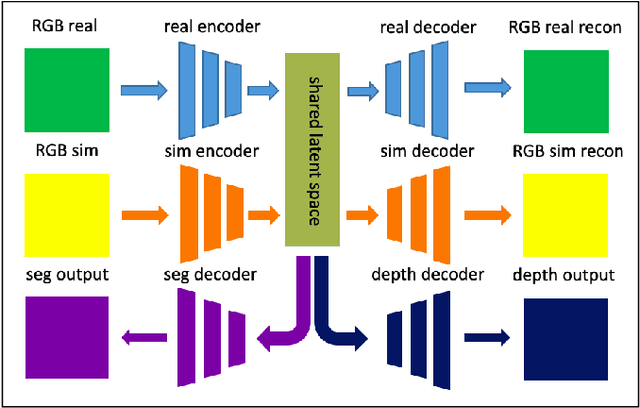
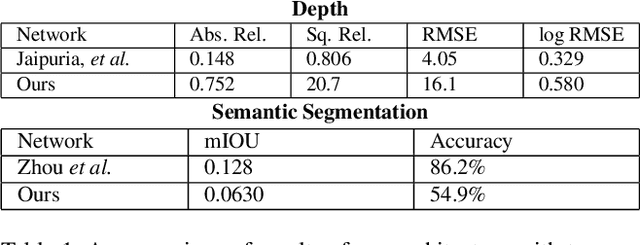
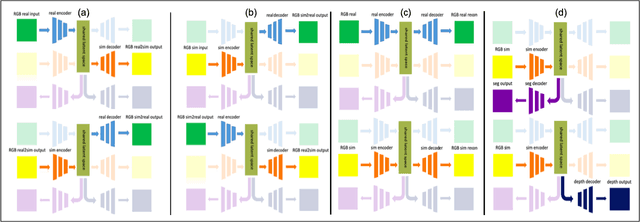

Image-based learning methods for autonomous vehicle perception tasks require large quantities of labelled, real data in order to properly train without overfitting, which can often be incredibly costly. While leveraging the power of simulated data can potentially aid in mitigating these costs, networks trained in the simulation domain usually fail to perform adequately when applied to images in the real domain. Recent advances in domain adaptation have indicated that a shared latent space assumption can help to bridge the gap between the simulation and real domains, allowing the transference of the predictive capabilities of a network from the simulation domain to the real domain. We demonstrate that a twin VAE-based architecture with a shared latent space and auxiliary decoders is able to bridge the sim2real gap without requiring any paired, ground-truth data in the real domain. Using only paired, ground-truth data in the simulation domain, this architecture has the potential to generate perception tasks such as depth and segmentation maps. We compare this method to networks trained in a supervised manner to indicate the merit of these results.
Fourier Features Let Networks Learn High Frequency Functions in Low Dimensional Domains
Jun 18, 2020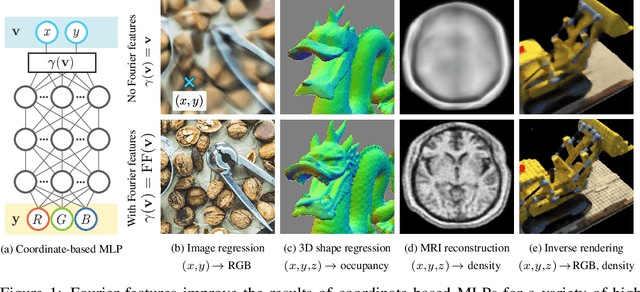

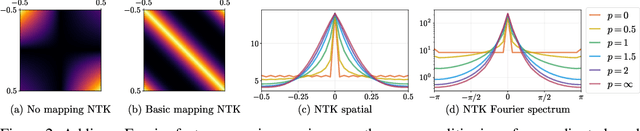
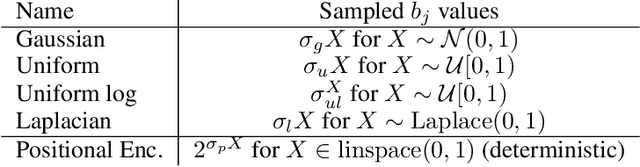
We show that passing input points through a simple Fourier feature mapping enables a multilayer perceptron (MLP) to learn high-frequency functions in low-dimensional problem domains. These results shed light on recent advances in computer vision and graphics that achieve state-of-the-art results by using MLPs to represent complex 3D objects and scenes. Using tools from the neural tangent kernel (NTK) literature, we show that a standard MLP fails to learn high frequencies both in theory and in practice. To overcome this spectral bias, we use a Fourier feature mapping to transform the effective NTK into a stationary kernel with a tunable bandwidth. We suggest an approach for selecting problem-specific Fourier features that greatly improves the performance of MLPs for low-dimensional regression tasks relevant to the computer vision and graphics communities.