 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHRONOBERG: Capturing Language Evolution and Temporal Awareness in Foundation Models
Sep 26, 2025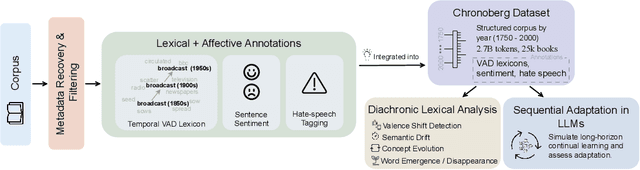

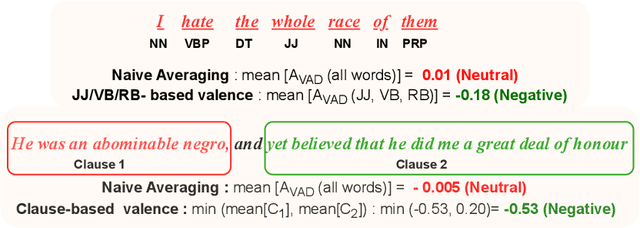

Large language models (LLMs) excel at operating at scale by leveraging social media and various data crawled from the web. Whereas existing corpora are diverse, their frequent lack of long-term temporal structure may however limit an LLM's ability to contextualize semantic and normative evolution of language and to capture diachronic variation. To support analysis and training for the latter, we introduce CHRONOBERG, a temporally structured corpus of English book texts spanning 250 years, curated from Project Gutenberg and enriched with a variety of temporal annotations. First, the edited nature of books enables us to quantify lexical semantic change through time-sensitive Valence-Arousal-Dominance (VAD) analysis and to construct historically calibrated affective lexicons to support temporally grounded interpretation. With the lexicons at hand, we demonstrate a need for modern LLM-based tools to better situate their detection of discriminatory language and contextualization of sentiment across various time-periods. In fact, we show how language models trained sequentially on CHRONOBERG struggle to encode diachronic shifts in meaning, emphasizing the need for temporally aware training and evaluation pipelines, and positioning CHRONOBERG as a scalable resource for the study of linguistic change and temporal generalization. Disclaimer: This paper includes language and display of samples that could be offensive to readers. Open Access: Chronoberg is available publicly on HuggingFace at ( https://huggingface.co/datasets/spaul25/Chronoberg). Code is available at (https://github.com/paulsubarna/Chronoberg).
Modality-Incremental Learning with Disjoint Relevance Mapping Networks for Image-based Semantic Segmentation
Nov 26, 2024



In autonomous driving, environment perception has significantly advanced with the utilization of deep learning techniques for diverse sensors such as cameras, depth sensors, or infrared sensors. The diversity in the sensor stack increases the safety and contributes to robustness against adverse weather and lighting conditions. However, the variance in data acquired from different sensors poses challenges. In the context of continual learning (CL), incremental learning is especially challenging for considerably large domain shifts, e.g. different sensor modalities. This amplifies the problem of catastrophic forgetting. To address this issue, we formulate the concept of modality-incremental learning and examine its necessity, by contrasting it with existing incremental learning paradigms. We propose the use of a modified Relevance Mapping Network (RMN) to incrementally learn new modalities while preserving performance on previously learned modalities, in which relevance maps are disjoint. Experimental results demonstrate that the prevention of shared connections in this approach helps alleviate the problem of forgetting within the constraints of a strict continual learning framework.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022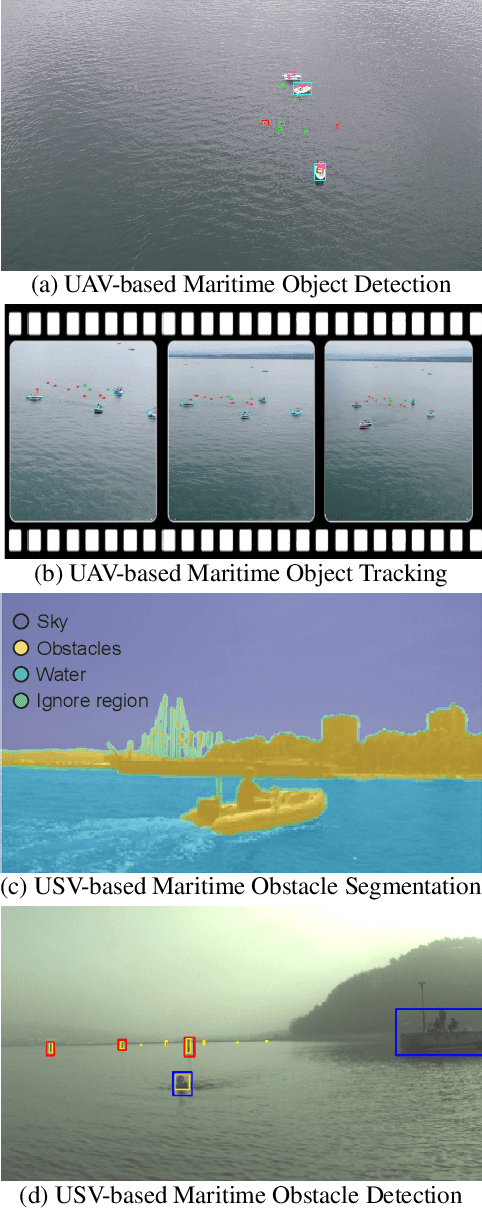
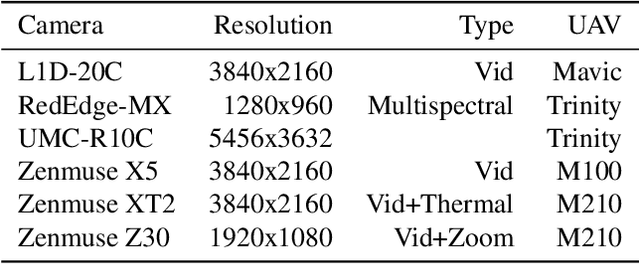
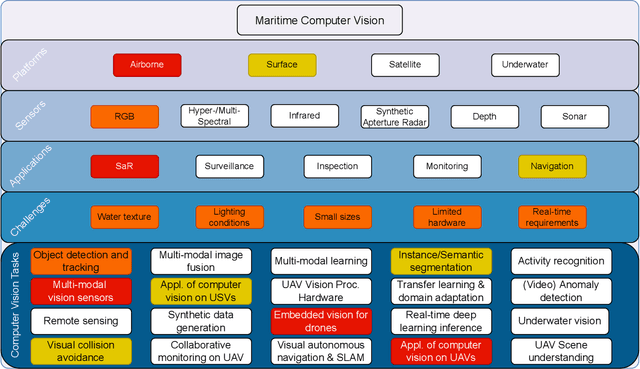
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.