 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting Motion in the Wild
Apr 01, 2026Visual intelligence requires anticipating the future behavior of agents, yet vision systems lack a general representation for motion and behavior. We propose dense point trajectories as visual tokens for behavior, a structured mid-level representation that disentangles motion from appearance and generalizes across diverse non-rigid agents, such as animals in-the-wild. Building on this abstraction, we design a diffusion transformer that models unordered sets of trajectories and explicitly reasons about occlusion, enabling coherent forecasts of complex motion patterns. To evaluate at scale, we curate 300 hours of unconstrained animal video with robust shot detection and camera-motion compensation. Experiments show that forecasting trajectory tokens achieves category-agnostic, data-efficient prediction, outperforms state-of-the-art baselines, and generalizes to rare species and morphologies, providing a foundation for predictive visual intelligence in the wild.
Poly-Autoregressive Prediction for Modeling Interactions
Feb 12, 2025We introduce a simple framework for predicting the behavior of an agent in multi-agent settings. In contrast to autoregressive (AR) tasks, such as language processing, our focus is on scenarios with multiple agents whose interactions are shaped by physical constraints and internal motivations. To this end, we propose Poly-Autoregressive (PAR) modeling, which forecasts an ego agent's future behavior by reasoning about the ego agent's state history and the past and current states of other interacting agents. At its core, PAR represents the behavior of all agents as a sequence of tokens, each representing an agent's state at a specific timestep. With minimal data pre-processing changes, we show that PAR can be applied to three different problems: human action forecasting in social situations, trajectory prediction for autonomous vehicles, and object pose forecasting during hand-object interaction. Using a small proof-of-concept transformer backbone, PAR outperforms AR across these three scenarios. The project website can be found at https://neerja.me/PAR/.
Adaptive Human Trajectory Prediction via Latent Corridors
Dec 11, 2023



Human trajectory prediction is typically posed as a zero-shot generalization problem: a predictor is learnt on a dataset of human motion in training scenes, and then deployed on unseen test scenes. While this paradigm has yielded tremendous progress, it fundamentally assumes that trends in human behavior within the deployment scene are constant over time. As such, current prediction models are unable to adapt to scene-specific transient human behaviors, such as crowds temporarily gathering to see buskers, pedestrians hurrying through the rain and avoiding puddles, or a protest breaking out. We formalize the problem of scene-specific adaptive trajectory prediction and propose a new adaptation approach inspired by prompt tuning called latent corridors. By augmenting the input of any pre-trained human trajectory predictor with learnable image prompts, the predictor can improve in the deployment scene by inferring trends from extremely small amounts of new data (e.g., 2 humans observed for 30 seconds). With less than 0.1% additional model parameters, we see up to 23.9% ADE improvement in MOTSynth simulated data and 16.4% ADE in MOT and Wildtrack real pedestrian data. Qualitatively, we observe that latent corridors imbue predictors with an awareness of scene geometry and scene-specific human behaviors that non-adaptive predictors struggle to capture. The project website can be found at https://neerja.me/atp_latent_corridors/.
More Than an Arm: Using a Manipulator as a Tail for Enhanced Stability in Legged Locomotion
May 02, 2023



Is a manipulator on a legged robot a liability or an asset for locomotion? Prior works mainly designed specific controllers to account for the added payload and inertia from a manipulator. In contrast, biological systems typically benefit from additional limbs, which can simplify postural control. For instance, cats use their tails to enhance the stability of their bodies and prevent falls under disturbances. In this work, we show that a manipulator can be an important asset for maintaining balance during locomotion. To do so, we train a sensorimotor policy using deep reinforcement learning to create a synergy between the robot's limbs. This policy enables the robot to maintain stability despite large disturbances. However, learning such a controller can be quite challenging. To account for these challenges, we propose a stage-wise training procedure to learn complex behaviors. Our proposed method decomposes this complex task into three stages and then incrementally learns these tasks to arrive at a single policy capable of solving the final control task, achieving a success rate up to 2.35 times higher than baselines in simulation. We deploy our learned policy in the real world and show stability during locomotion under strong disturbances.
Studying Bias in GANs through the Lens of Race
Sep 15, 2022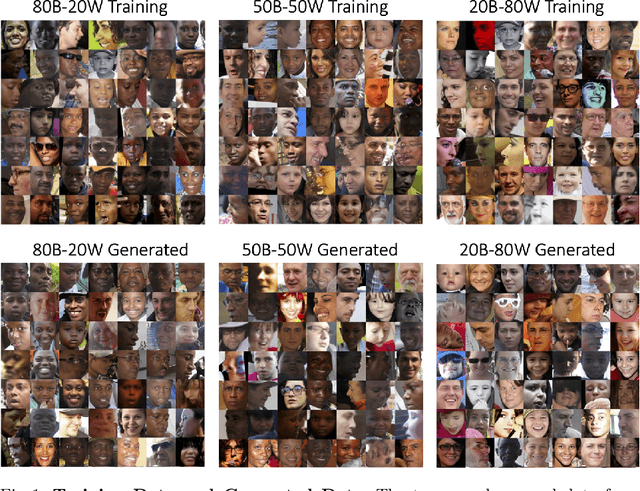

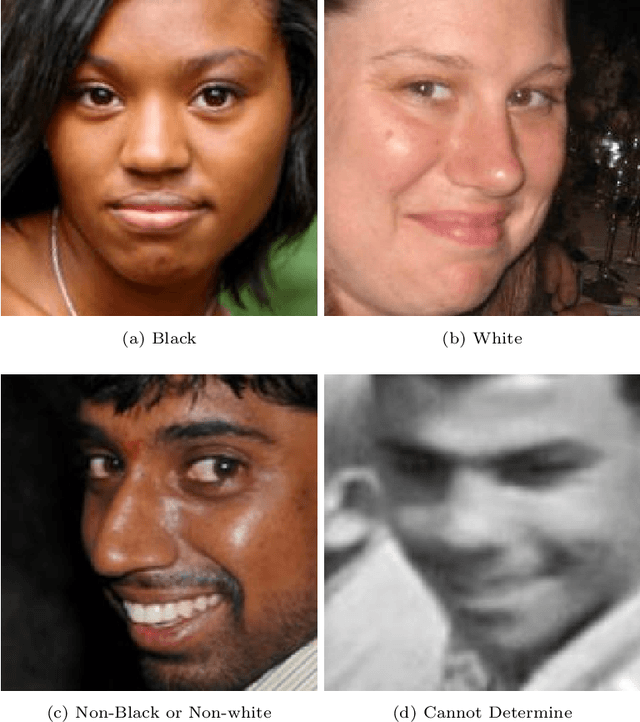
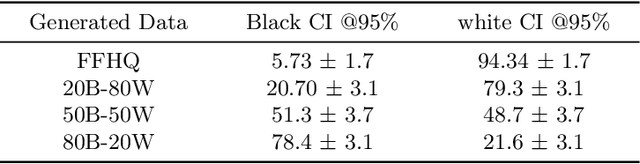
In this work, we study how the performance and evaluation of generative image models are impacted by the racial composition of their training datasets. By examining and controlling the racial distributions in various training datasets, we are able to observe the impacts of different training distributions on generated image quality and the racial distributions of the generated images. Our results show that the racial compositions of generated images successfully preserve that of the training data. However, we observe that truncation, a technique used to generate higher quality images during inference, exacerbates racial imbalances in the data. Lastly, when examining the relationship between image quality and race, we find that the highest perceived visual quality images of a given race come from a distribution where that race is well-represented, and that annotators consistently prefer generated images of white people over those of Black people.