 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCinematic Gaussians: Real-Time HDR Radiance Fields with Depth of Field
Jun 11, 2024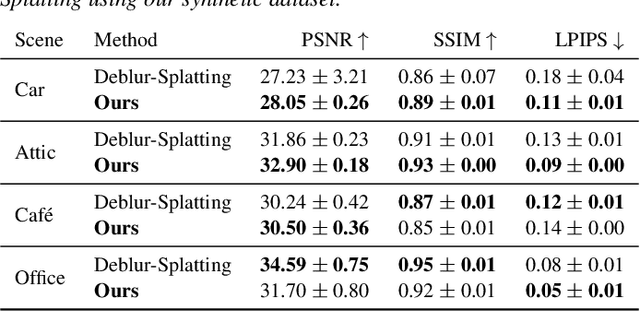

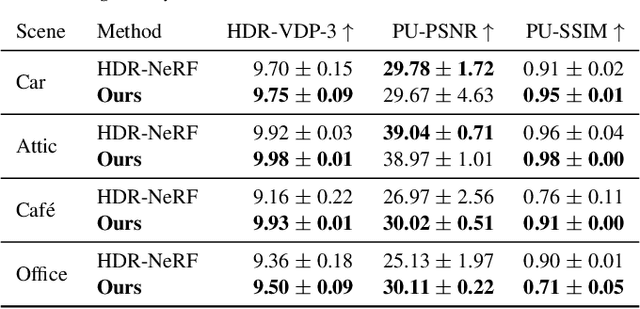
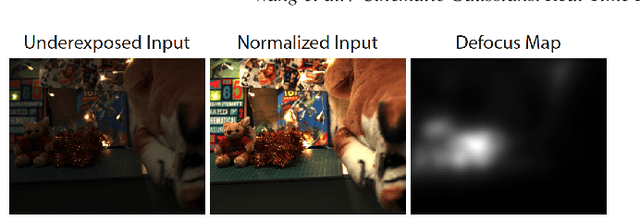
Radiance field methods represent the state of the art in reconstructing complex scenes from multi-view photos. However, these reconstructions often suffer from one or both of the following limitations: First, they typically represent scenes in low dynamic range (LDR), which restricts their use to evenly lit environments and hinders immersive viewing experiences. Secondly, their reliance on a pinhole camera model, assuming all scene elements are in focus in the input images, presents practical challenges and complicates refocusing during novel-view synthesis. Addressing these limitations, we present a lightweight method based on 3D Gaussian Splatting that utilizes multi-view LDR images of a scene with varying exposure times, apertures, and focus distances as input to reconstruct a high-dynamic-range (HDR) radiance field. By incorporating analytical convolutions of Gaussians based on a thin-lens camera model as well as a tonemapping module, our reconstructions enable the rendering of HDR content with flexible refocusing capabilities. We demonstrate that our combined treatment of HDR and depth of field facilitates real-time cinematic rendering, outperforming the state of the art.
Exposure Diffusion: HDR Image Generation by Consistent LDR denoising
May 23, 2024
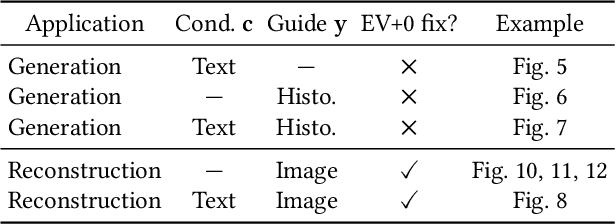
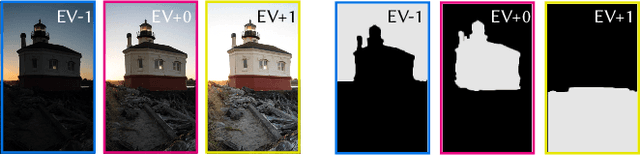
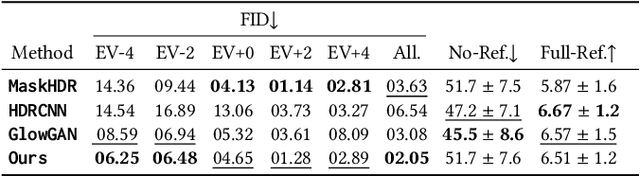
We demonstrate generating high-dynamic range (HDR) images using the concerted action of multiple black-box, pre-trained low-dynamic range (LDR) image diffusion models. Common diffusion models are not HDR as, first, there is no sufficiently large HDR image dataset available to re-train them, and second, even if it was, re-training such models is impossible for most compute budgets. Instead, we seek inspiration from the HDR image capture literature that traditionally fuses sets of LDR images, called "brackets", to produce a single HDR image. We operate multiple denoising processes to generate multiple LDR brackets that together form a valid HDR result. To this end, we introduce an exposure consistency term into the diffusion process to couple the brackets such that they agree across the exposure range they share. We demonstrate HDR versions of state-of-the-art unconditional and conditional as well as restoration-type (LDR2HDR) generative modeling.
Enhancing image quality prediction with self-supervised visual masking
May 31, 2023Full-reference image quality metrics (FR-IQMs) aim to measure the visual differences between a pair of reference and distorted images, with the goal of accurately predicting human judgments. However, existing FR-IQMs, including traditional ones like PSNR and SSIM and even perceptual ones such as HDR-VDP, LPIPS, and DISTS, still fall short in capturing the complexities and nuances of human perception. In this work, rather than devising a novel IQM model, we seek to improve upon the perceptual quality of existing FR-IQM methods. We achieve this by considering visual masking, an important characteristic of the human visual system that changes its sensitivity to distortions as a function of local image content. Specifically, for a given FR-IQM metric, we propose to predict a visual masking model that modulates reference and distorted images in a way that penalizes the visual errors based on their visibility. Since the ground truth visual masks are difficult to obtain, we demonstrate how they can be derived in a self-supervised manner solely based on mean opinion scores (MOS) collected from an FR-IQM dataset. Our approach results in enhanced FR-IQM metrics that are more in line with human prediction both visually and quantitatively.
Revisiting Image Deblurring with an Efficient ConvNet
Feb 04, 2023Image deblurring aims to recover the latent sharp image from its blurry counterpart and has a wide range of applications in computer vision. The Convolution Neural Networks (CNNs) have performed well in this domain for many years, and until recently an alternative network architecture, namely Transformer, has demonstrated even stronger performance. One can attribute its superiority to the multi-head self-attention (MHSA) mechanism, which offers a larger receptive field and better input content adaptability than CNNs. However, as MHSA demands high computational costs that grow quadratically with respect to the input resolution, it becomes impractical for high-resolution image deblurring tasks. In this work, we propose a unified lightweight CNN network that features a large effective receptive field (ERF) and demonstrates comparable or even better performance than Transformers while bearing less computational costs. Our key design is an efficient CNN block dubbed LaKD, equipped with a large kernel depth-wise convolution and spatial-channel mixing structure, attaining comparable or larger ERF than Transformers but with a smaller parameter scale. Specifically, we achieve +0.17dB / +0.43dB PSNR over the state-of-the-art Restormer on defocus / motion deblurring benchmark datasets with 32% fewer parameters and 39% fewer MACs. Extensive experiments demonstrate the superior performance of our network and the effectiveness of each module. Furthermore, we propose a compact and intuitive ERFMeter metric that quantitatively characterizes ERF, and shows a high correlation to the network performance. We hope this work can inspire the research community to further explore the pros and cons of CNN and Transformer architectures beyond image deblurring tasks.
Video frame interpolation for high dynamic range sequences captured with dual-exposure sensors
Jun 19, 2022

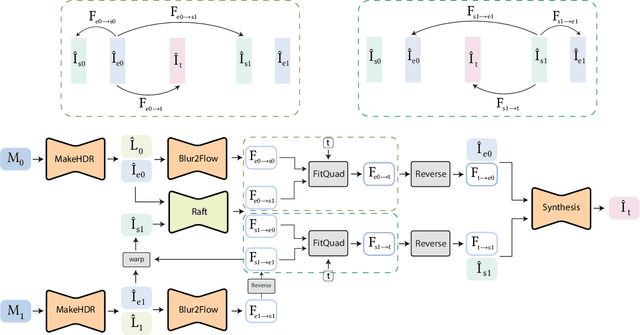

Video frame interpolation (VFI) enables many important applications that might involve the temporal domain, such as slow motion playback, or the spatial domain, such as stop motion sequences. We are focusing on the former task, where one of the key challenges is handling high dynamic range (HDR) scenes in the presence of complex motion. To this end, we explore possible advantages of dual-exposure sensors that readily provide sharp short and blurry long exposures that are spatially registered and whose ends are temporally aligned. This way, motion blur registers temporally continuous information on the scene motion that, combined with the sharp reference, enables more precise motion sampling within a single camera shot. We demonstrate that this facilitates a more complex motion reconstruction in the VFI task, as well as HDR frame reconstruction that so far has been considered only for the originally captured frames, not in-between interpolated frames. We design a neural network trained in these tasks that clearly outperforms existing solutions. We also propose a metric for scene motion complexity that provides important insights into the performance of VFI methods at the test time.
Eikonal Fields for Refractive Novel-View Synthesis
Feb 11, 2022
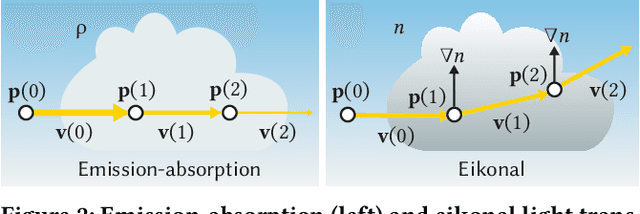

We tackle the problem of generating novel-view images from collections of 2D images showing refractive and reflective objects. Current solutions assume opaque or transparent light transport along straight paths following the emission-absorption model. Instead, we optimize for a field of 3D-varying Index of Refraction (IoR) and trace light through it that bends toward the spatial gradients of said IoR according to the laws of eikonal light transport.
HDR Denoising and Deblurring by Learning Spatio-temporal Distortion Models
Dec 23, 2020


We seek to reconstruct sharp and noise-free high-dynamic range (HDR) video from a dual-exposure sensor that records different low-dynamic range (LDR) information in different pixel columns: Odd columns provide low-exposure, sharp, but noisy information; even columns complement this with less noisy, high-exposure, but motion-blurred data. Previous LDR work learns to deblur and denoise (DISTORTED->CLEAN) supervised by pairs of CLEAN and DISTORTED images. Regrettably, capturing DISTORTED sensor readings is time-consuming; as well, there is a lack of CLEAN HDR videos. We suggest a method to overcome those two limitations. First, we learn a different function instead: CLEAN->DISTORTED, which generates samples containing correlated pixel noise, and row and column noise, as well as motion blur from a low number of CLEAN sensor readings. Second, as there is not enough CLEAN HDR video available, we devise a method to learn from LDR video in-stead. Our approach compares favorably to several strong baselines, and can boost existing methods when they are re-trained on our data. Combined with spatial and temporal super-resolution, it enables applications such as re-lighting with low noise or blur.
X-Fields: Implicit Neural View-, Light- and Time-Image Interpolation
Oct 01, 2020
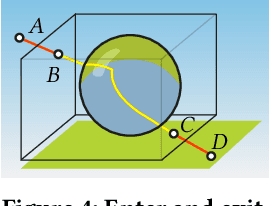
We suggest to represent an X-Field -a set of 2D images taken across different view, time or illumination conditions, i.e., video, light field, reflectance fields or combinations thereof-by learning a neural network (NN) to map their view, time or light coordinates to 2D images. Executing this NN at new coordinates results in joint view, time or light interpolation. The key idea to make this workable is a NN that already knows the "basic tricks" of graphics (lighting, 3D projection, occlusion) in a hard-coded and differentiable form. The NN represents the input to that rendering as an implicit map, that for any view, time, or light coordinate and for any pixel can quantify how it will move if view, time or light coordinates change (Jacobian of pixel position with respect to view, time, illumination, etc.). Our X-Field representation is trained for one scene within minutes, leading to a compact set of trainable parameters and hence real-time navigation in view, time and illumination.
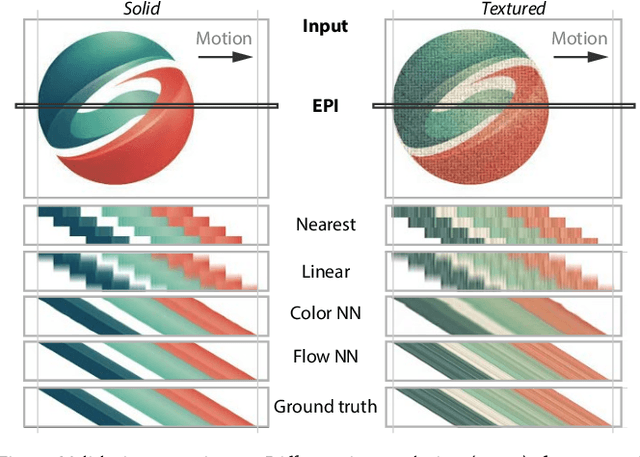
Neural View-Interpolation for Sparse Light Field Video
Nov 06, 2019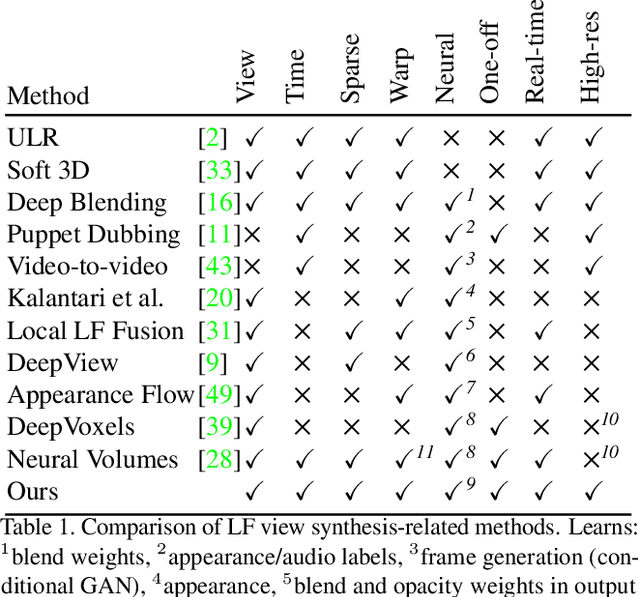


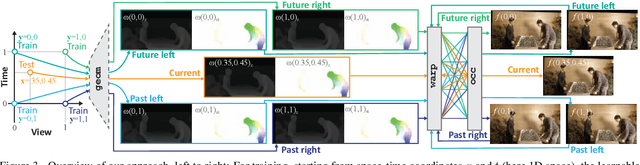
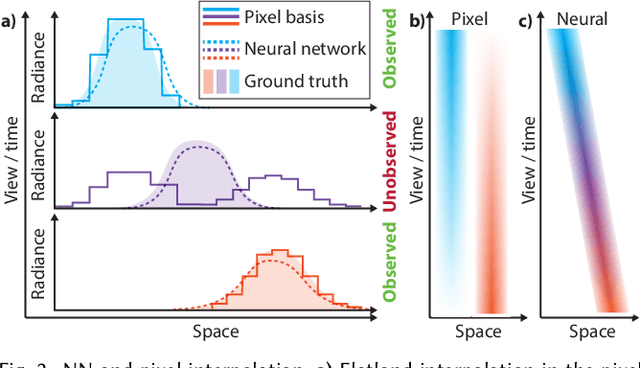
We suggest representing light field (LF) videos as "one-off" neural networks (NN), i.e., a learned mapping from view-plus-time coordinates to high-resolution color values, trained on sparse views. Initially, this sounds like a bad idea for three main reasons: First, a NN LF will likely have less quality than a same-sized pixel basis representation. Second, only few training data, e.g., 9 exemplars per frame are available for sparse LF videos. Third, there is no generalization across LFs, but across view and time instead. Consequently, a network needs to be trained for each LF video. Surprisingly, these problems can turn into substantial advantages: Other than the linear pixel basis, a NN has to come up with a compact, non-linear i.e., more intelligent, explanation of color, conditioned on the sparse view and time coordinates. As observed for many NN however, this representation now is interpolatable: if the image output for sparse view coordinates is plausible, it is for all intermediate, continuous coordinates as well. Our specific network architecture involves a differentiable occlusion-aware warping step, which leads to a compact set of trainable parameters and consequently fast learning and fast execution.