 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural View-Interpolation for Sparse Light Field Video
Paper and Code
Nov 06, 2019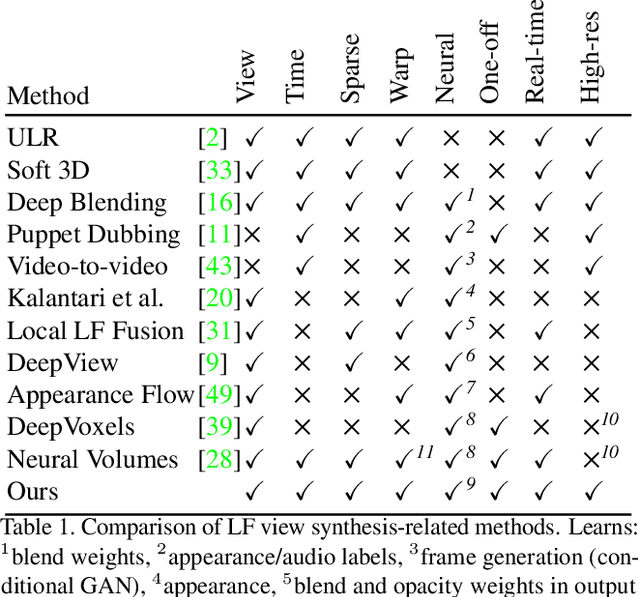


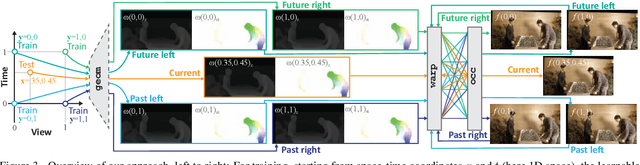
We suggest representing light field (LF) videos as "one-off" neural networks (NN), i.e., a learned mapping from view-plus-time coordinates to high-resolution color values, trained on sparse views. Initially, this sounds like a bad idea for three main reasons: First, a NN LF will likely have less quality than a same-sized pixel basis representation. Second, only few training data, e.g., 9 exemplars per frame are available for sparse LF videos. Third, there is no generalization across LFs, but across view and time instead. Consequently, a network needs to be trained for each LF video. Surprisingly, these problems can turn into substantial advantages: Other than the linear pixel basis, a NN has to come up with a compact, non-linear i.e., more intelligent, explanation of color, conditioned on the sparse view and time coordinates. As observed for many NN however, this representation now is interpolatable: if the image output for sparse view coordinates is plausible, it is for all intermediate, continuous coordinates as well. Our specific network architecture involves a differentiable occlusion-aware warping step, which leads to a compact set of trainable parameters and consequently fast learning and fast execution.