 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
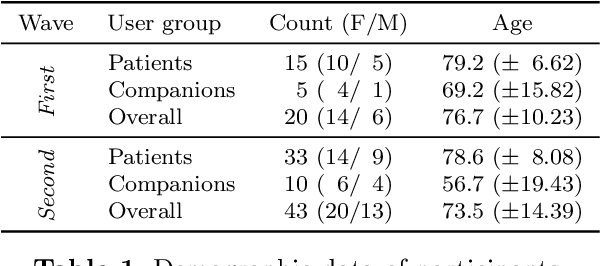
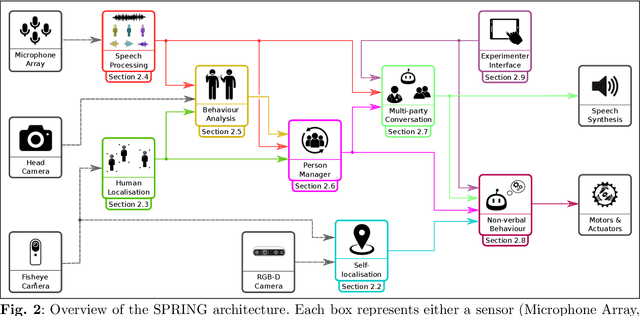
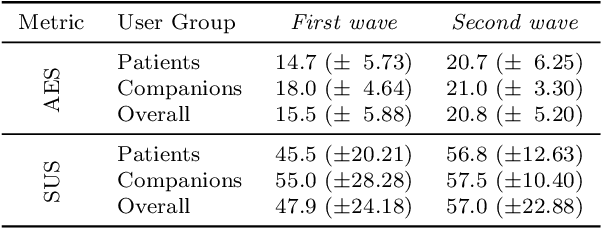
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.
A Large Scale Homography Benchmark
Feb 20, 2023



We present a large-scale dataset of Planes in 3D, Pi3D, of roughly 1000 planes observed in 10 000 images from the 1DSfM dataset, and HEB, a large-scale homography estimation benchmark leveraging Pi3D. The applications of the Pi3D dataset are diverse, e.g. training or evaluating monocular depth, surface normal estimation and image matching algorithms. The HEB dataset consists of 226 260 homographies and includes roughly 4M correspondences. The homographies link images that often undergo significant viewpoint and illumination changes. As applications of HEB, we perform a rigorous evaluation of a wide range of robust estimators and deep learning-based correspondence filtering methods, establishing the current state-of-the-art in robust homography estimation. We also evaluate the uncertainty of the SIFT orientations and scales w.r.t. the ground truth coming from the underlying homographies and provide codes for comparing uncertainty of custom detectors. The dataset is available at \url{https://github.com/danini/homography-benchmark}.
D-InLoc++: Indoor Localization in Dynamic Environments
Sep 21, 2022

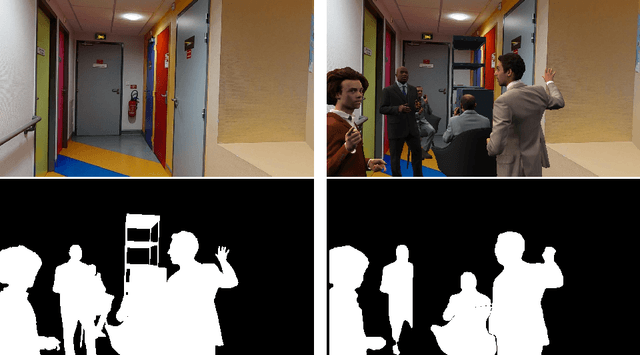

Most state-of-the-art localization algorithms rely on robust relative pose estimation and geometry verification to obtain moving object agnostic camera poses in complex indoor environments. However, this approach is prone to mistakes if a scene contains repetitive structures, e.g., desks, tables, boxes, or moving people. We show that the movable objects incorporate non-negligible localization error and present a new straightforward method to predict the six-degree-of-freedom (6DoF) pose more robustly. We equipped the localization pipeline InLoc with real-time instance segmentation network YOLACT++. The masks of dynamic objects are employed in the relative pose estimation step and in the final sorting of camera pose proposal. At first, we filter out the matches laying on masks of the dynamic objects. Second, we skip the comparison of query and synthetic images on the area related to the moving object. This procedure leads to a more robust localization. Lastly, we describe and improve the mistakes caused by gradient-based comparison between synthetic and query images and publish a new pipeline for simulation of environments with movable objects from the Matterport scans. All the codes are available on github.com/dubenma/D-InLocpp .
Making Affine Correspondences Work in Camera Geometry Computation
Jul 20, 2020

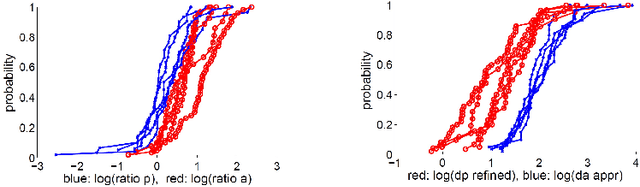

Local features e.g. SIFT and its affine and learned variants provide region-to-region rather than point-to-point correspondences. This has recently been exploited to create new minimal solvers for classical problems such as homography, essential and fundamental matrix estimation. The main advantage of such solvers is that their sample size is smaller, e.g., only two instead of four matches are required to estimate a homography. Works proposing such solvers often claim a significant improvement in run-time thanks to fewer RANSAC iterations. We show that this argument is not valid in practice if the solvers are used naively. To overcome this, we propose guidelines for effective use of region-to-region matches in the course of a full model estimation pipeline. We propose a method for refining the local feature geometries by symmetric intensity-based matching, combine uncertainty propagation inside RANSAC with preemptive model verification, show a general scheme for computing uncertainty of minimal solvers results, and adapt the sample cheirality check for homography estimation. Our experiments show that affine solvers can achieve accuracy comparable to point-based solvers at faster run-times when following our guidelines. We make code available at https://github.com/danini/affine-correspondences-for-camera-geometry.
Fast and Accurate Camera Covariance Computation for Large 3D Reconstruction
Aug 07, 2018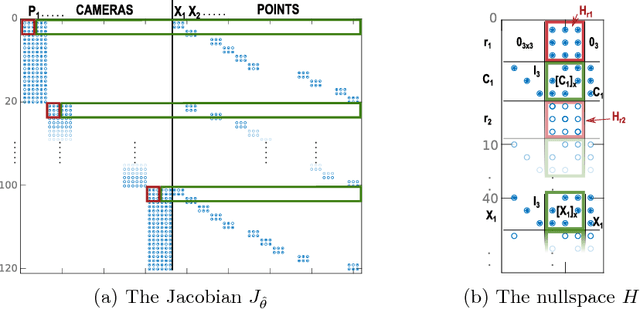



Estimating uncertainty of camera parameters computed in Structure from Motion (SfM) is an important tool for evaluating the quality of the reconstruction and guiding the reconstruction process. Yet, the quality of the estimated parameters of large reconstructions has been rarely evaluated due to the computational challenges. We present a new algorithm which employs the sparsity of the uncertainty propagation and speeds the computation up about ten times \wrt previous approaches. Our computation is accurate and does not use any approximations. We can compute uncertainties of thousands of cameras in tens of seconds on a standard PC. We also demonstrate that our approach can be effectively used for reconstructions of any size by applying it to smaller sub-reconstructions.