 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Pixel Control: Challenges and Prospects
Aug 08, 2024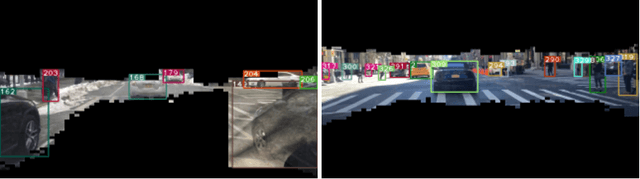
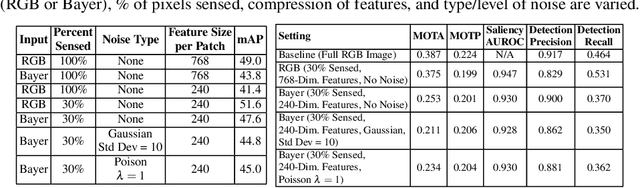
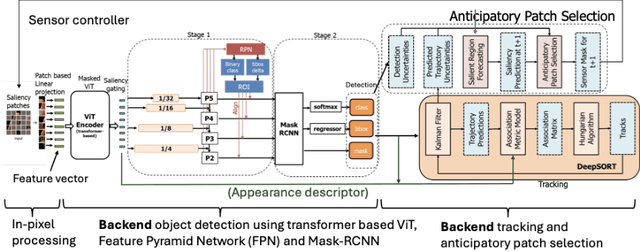

Recent advancements in sensors have led to high resolution and high data throughput at the pixel level. Simultaneously, the adoption of increasingly large (deep) neural networks (NNs) has lead to significant progress in computer vision. Currently, visual intelligence comes at increasingly high computational complexity, energy, and latency. We study a data-driven system that combines dynamic sensing at the pixel level with computer vision analytics at the video level and propose a feedback control loop to minimize data movement between the sensor front-end and computational back-end without compromising detection and tracking precision. Our contributions are threefold: (1) We introduce anticipatory attention and show that it leads to high precision prediction with sparse activation of pixels; (2) Leveraging the feedback control, we show that the dimensionality of learned feature vectors can be significantly reduced with increased sparsity; and (3) We emulate analog design choices (such as varying RGB or Bayer pixel format and analog noise) and study their impact on the key metrics of the data-driven system. Comparative analysis with traditional pixel and deep learning models shows significant performance enhancements. Our system achieves a 10X reduction in bandwidth and a 15-30X improvement in Energy-Delay Product (EDP) when activating only 30% of pixels, with a minor reduction in object detection and tracking precision. Based on analog emulation, our system can achieve a throughput of 205 megapixels/sec (MP/s) with a power consumption of only 110 mW per MP, i.e., a theoretical improvement of ~30X in EDP.
Efficient Model Adaptation for Continual Learning at the Edge
Aug 03, 2023



Most machine learning (ML) systems assume stationary and matching data distributions during training and deployment. This is often a false assumption. When ML models are deployed on real devices, data distributions often shift over time due to changes in environmental factors, sensor characteristics, and task-of-interest. While it is possible to have a human-in-the-loop to monitor for distribution shifts and engineer new architectures in response to these shifts, such a setup is not cost-effective. Instead, non-stationary automated ML (AutoML) models are needed. This paper presents the Encoder-Adaptor-Reconfigurator (EAR) framework for efficient continual learning under domain shifts. The EAR framework uses a fixed deep neural network (DNN) feature encoder and trains shallow networks on top of the encoder to handle novel data. The EAR framework is capable of 1) detecting when new data is out-of-distribution (OOD) by combining DNNs with hyperdimensional computing (HDC), 2) identifying low-parameter neural adaptors to adapt the model to the OOD data using zero-shot neural architecture search (ZS-NAS), and 3) minimizing catastrophic forgetting on previous tasks by progressively growing the neural architecture as needed and dynamically routing data through the appropriate adaptors and reconfigurators for handling domain-incremental and class-incremental continual learning. We systematically evaluate our approach on several benchmark datasets for domain adaptation and demonstrate strong performance compared to state-of-the-art algorithms for OOD detection and few-/zero-shot NAS.
System Design for an Integrated Lifelong Reinforcement Learning Agent for Real-Time Strategy Games
Dec 08, 2022

As Artificial and Robotic Systems are increasingly deployed and relied upon for real-world applications, it is important that they exhibit the ability to continually learn and adapt in dynamically-changing environments, becoming Lifelong Learning Machines. Continual/lifelong learning (LL) involves minimizing catastrophic forgetting of old tasks while maximizing a model's capability to learn new tasks. This paper addresses the challenging lifelong reinforcement learning (L2RL) setting. Pushing the state-of-the-art forward in L2RL and making L2RL useful for practical applications requires more than developing individual L2RL algorithms; it requires making progress at the systems-level, especially research into the non-trivial problem of how to integrate multiple L2RL algorithms into a common framework. In this paper, we introduce the Lifelong Reinforcement Learning Components Framework (L2RLCF), which standardizes L2RL systems and assimilates different continual learning components (each addressing different aspects of the lifelong learning problem) into a unified system. As an instantiation of L2RLCF, we develop a standard API allowing easy integration of novel lifelong learning components. We describe a case study that demonstrates how multiple independently-developed LL components can be integrated into a single realized system. We also introduce an evaluation environment in order to measure the effect of combining various system components. Our evaluation environment employs different LL scenarios (sequences of tasks) consisting of Starcraft-2 minigames and allows for the fair, comprehensive, and quantitative comparison of different combinations of components within a challenging common evaluation environment.
Learning with Local Gradients at the Edge
Aug 17, 2022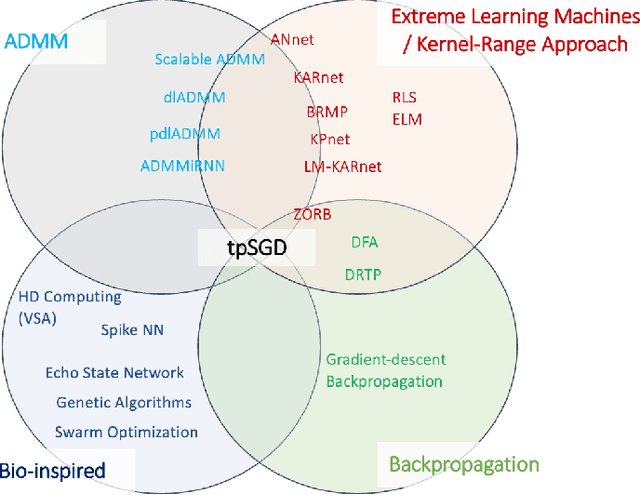
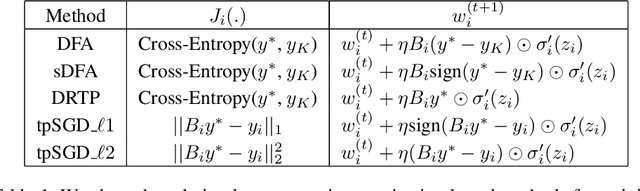

To enable learning on edge devices with fast convergence and low memory, we present a novel backpropagation-free optimization algorithm dubbed Target Projection Stochastic Gradient Descent (tpSGD). tpSGD generalizes direct random target projection to work with arbitrary loss functions and extends target projection for training recurrent neural networks (RNNs) in addition to feedforward networks. tpSGD uses layer-wise stochastic gradient descent (SGD) and local targets generated via random projections of the labels to train the network layer-by-layer with only forward passes. tpSGD doesn't require retaining gradients during optimization, greatly reducing memory allocation compared to SGD backpropagation (BP) methods that require multiple instances of the entire neural network weights, input/output, and intermediate results. Our method performs comparably to BP gradient-descent within 5% accuracy on relatively shallow networks of fully connected layers, convolutional layers, and recurrent layers. tpSGD also outperforms other state-of-the-art gradient-free algorithms in shallow models consisting of multi-layer perceptrons, convolutional neural networks (CNNs), and RNNs with competitive accuracy and less memory and time. We evaluate the performance of tpSGD in training deep neural networks (e.g. VGG) and extend the approach to multi-layer RNNs. These experiments highlight new research directions related to optimized layer-based adaptor training for domain-shift using tpSGD at the edge.
Model-Free Generative Replay for Lifelong Reinforcement Learning: Application to Starcraft-2
Aug 16, 2022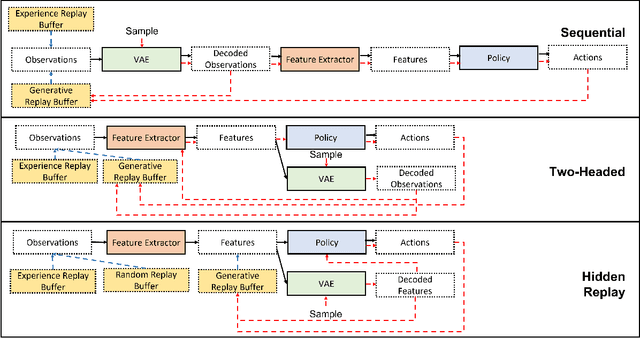

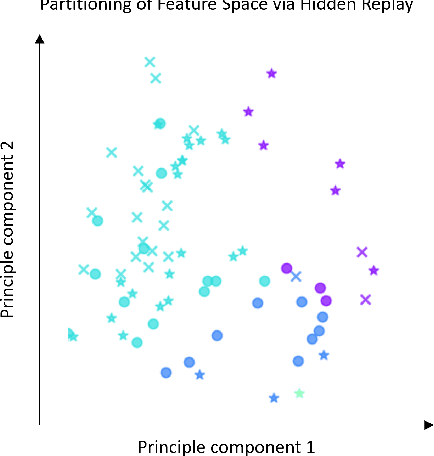

One approach to meet the challenges of deep lifelong reinforcement learning (LRL) is careful management of the agent's learning experiences, to learn (without forgetting) and build internal meta-models (of the tasks, environments, agents, and world). Generative replay (GR) is a biologically inspired replay mechanism that augments learning experiences with self-labelled examples drawn from an internal generative model that is updated over time. We present a version of GR for LRL that satisfies two desiderata: (a) Introspective density modelling of the latent representations of policies learned using deep RL, and (b) Model-free end-to-end learning. In this paper, we study three deep learning architectures for model-free GR, starting from a na\"ive GR and adding ingredients to achieve (a) and (b). We evaluate our proposed algorithms on three different scenarios comprising tasks from the Starcraft-2 and Minigrid domains. We report several key findings showing the impact of the design choices on quantitative metrics that include transfer learning, generalization to unseen tasks, fast adaptation after task change, performance wrt task expert, and catastrophic forgetting. We observe that our GR prevents drift in the features-to-action mapping from the latent vector space of a deep RL agent. We also show improvements in established lifelong learning metrics. We find that a small random replay buffer significantly increases the stability of training. Overall, we find that "hidden replay" (a well-known architecture for class-incremental classification) is the most promising approach that pushes the state-of-the-art in GR for LRL and observe that the architecture of the sleep model might be more important for improving performance than the types of replay used. Our experiments required only 6% of training samples to achieve 80-90% of expert performance in most Starcraft-2 scenarios.
Real-time Hyper-Dimensional Reconfiguration at the Edge using Hardware Accelerators
Jun 10, 2022
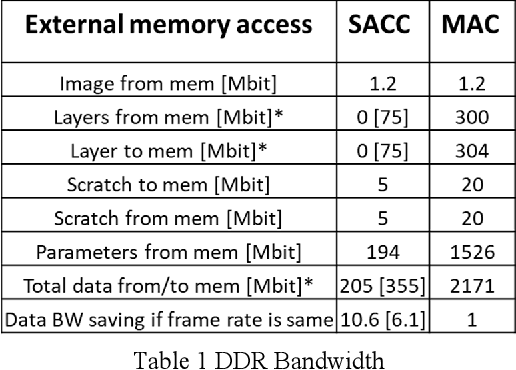
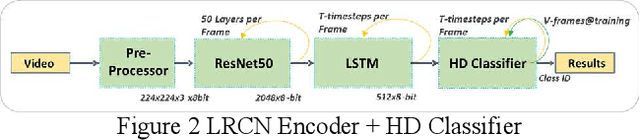
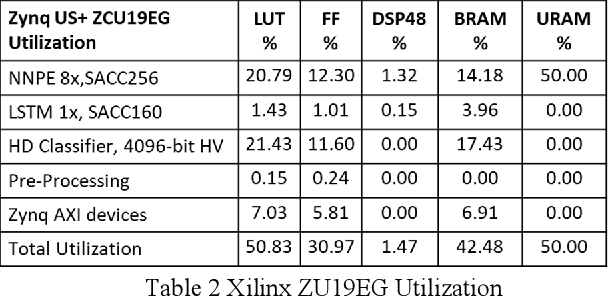
In this paper we present Hyper-Dimensional Reconfigurable Analytics at the Tactical Edge (HyDRATE) using low-SWaP embedded hardware that can perform real-time reconfiguration at the edge leveraging non-MAC (free of floating-point MultiplyACcumulate operations) deep neural nets (DNN) combined with hyperdimensional (HD) computing accelerators. We describe the algorithm, trained quantized model generation, and simulated performance of a feature extractor free of multiply-accumulates feeding a hyperdimensional logic-based classifier. Then we show how performance increases with the number of hyperdimensions. We describe the realized low-SWaP FPGA hardware and embedded software system compared to traditional DNNs and detail the implemented hardware accelerators. We discuss the measured system latency and power, noise robustness due to use of learnable quantization and HD computing, actual versus simulated system performance for a video activity classification task and demonstration of reconfiguration on this same dataset. We show that reconfigurability in the field is achieved by retraining only the feed-forward HD classifier without gradient descent backpropagation (gradient-free), using few-shot learning of new classes at the edge. Initial work performed used LRCN DNN and is currently extended to use Two-stream DNN with improved performance.
Saccade Mechanisms for Image Classification, Object Detection and Tracking
Jun 10, 2022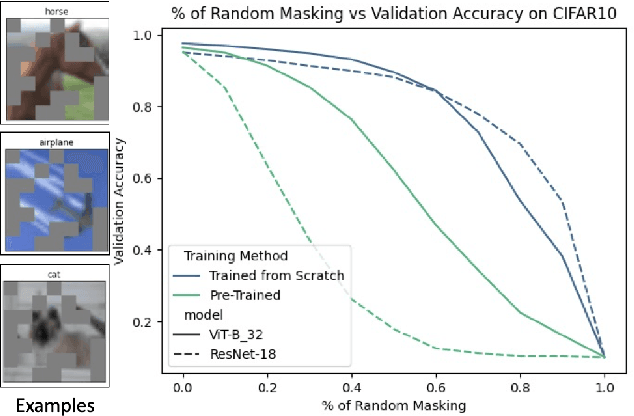
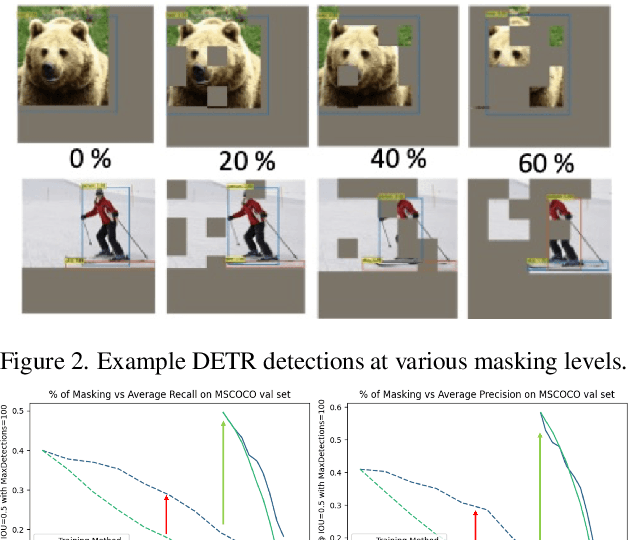
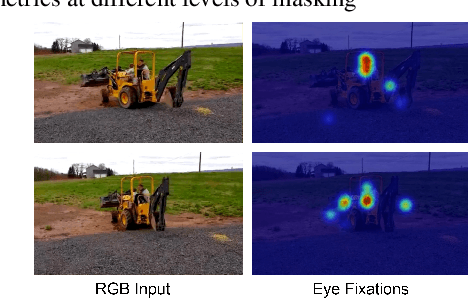
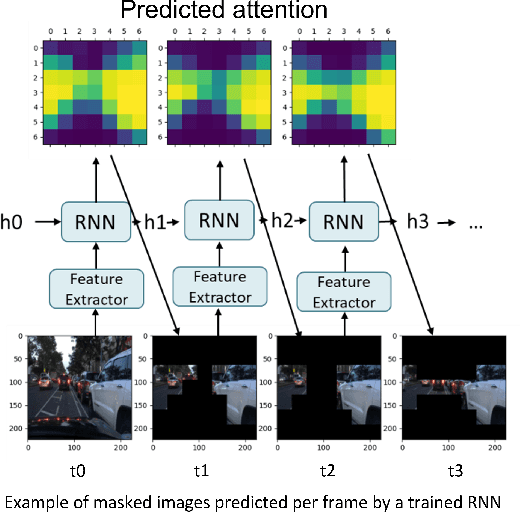
We examine how the saccade mechanism from biological vision can be used to make deep neural networks more efficient for classification and object detection problems. Our proposed approach is based on the ideas of attention-driven visual processing and saccades, miniature eye movements influenced by attention. We conduct experiments by analyzing: i) the robustness of different deep neural network (DNN) feature extractors to partially-sensed images for image classification and object detection, and ii) the utility of saccades in masking image patches for image classification and object tracking. Experiments with convolutional nets (ResNet-18) and transformer-based models (ViT, DETR, TransTrack) are conducted on several datasets (CIFAR-10, DAVSOD, MSCOCO, and MOT17). Our experiments show intelligent data reduction via learning to mimic human saccades when used in conjunction with state-of-the-art DNNs for classification, detection, and tracking tasks. We observed minimal drop in performance for the classification and detection tasks while only using about 30\% of the original sensor data. We discuss how the saccade mechanism can inform hardware design via ``in-pixel'' processing.